下面用一个实例来介绍如何组建多CPU系统,以及如何利用CPU间的自动刷新功能进行数据的传送。图10-11 多CPU系统的自动刷新示意图PLC顺序控制CPU侧的设置如下:1)图10-12所示为设置M软元件的自动刷新范围。运动控制CPU侧的设置如下:打开运动控制CPU对应的程序编写软件MT Developer,进入多CPU设置画面,进行相应的设置。当Q02HCPU的M3为ON时,退出SFC程序。......
2023-06-16
前面介绍了如何去构建一个多CPU系统,那么多CPU系统构建完毕后,CPU之间是怎么进行数据交换的呢?下面将进行详细介绍。
在多CPU系统中,多CPU控制各自的相应模块,互相之间需要进行信息的交换。多CPU之间的信息交换是通过自动刷新功能来完成的,在对各CPU进行了自动刷新设置以后,各CPU之间就可以进行数据交换了。在多CPU系统的所有CPU之间交换了数据以后,Q系列CPU和其他的CPU运行END处理时,会自动执行公共CPU存储器的自动刷新。在执行自动刷新功能时,会自动读取其他CPU的软元件存储器数据,可以使此CPU使用其他CPU的软元件数据,如图10-5所示。
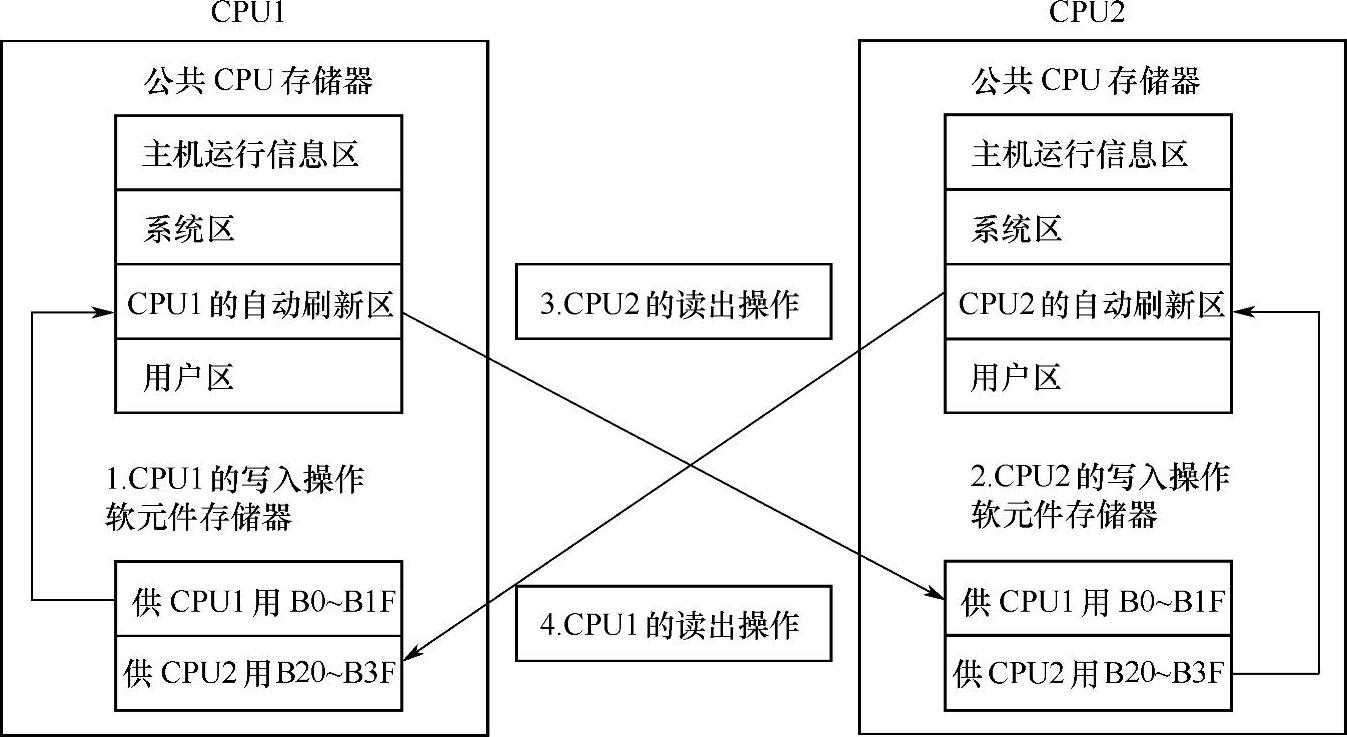
图10-5 多CPU系统的自动刷新原理
假设系统的CPU1在B0~B1F之间设定了32点的自动刷新,CPU2在B20~B3F之间执行32点的自动刷新,如图10-6所示。

图10-6 多CPU设置
那么在CPU1的END处理期间,执行的处理过程为图10-5中的1.和4.,即:
1)CPU1的B0~B1F传输软元件数据被传送到CPU1的自动刷新区(1.)。
2)CPU2的自动刷新区的数据被传送到CPU1的B20~B3F(4.)。
在CPU2的END处理期间,执行的处理过程为图10-5中的2.和3.,即:
1)CPU2的B20~B3F传输软元件数据被传送到CPU2的自动刷新区(2.)。
2)CPU1的自动刷新区的数据被传送到CPU2的B0~B1F(3.)。
另外,需要注意的是,当PLC顺序控制CPU或其他CPU处在RUN状态、STOP状态、PAUSE状态时才执行自动刷新;当CPU发生停止出错时,不能执行自动刷新。
PLC顺序控制CPU和其他CPU之间,除了上面叙述的采用软元件的自动刷新处理功能进行信息交换外,还可以用以下方式进行通信:
1.使用FROM/TO指令或智能功能软元件指令U□\G□在PLC顺序控制CPU之间进行通信
通过使用FROM/TO指令或智能功能软元件指令U□\G□,可以访问PLC的公共存储器里的用户区。其中用TO指令把数据写入到主机公共CPU存储器中,然后通过其他CPU用FROM指令来读取其数据,如图10-7所示。
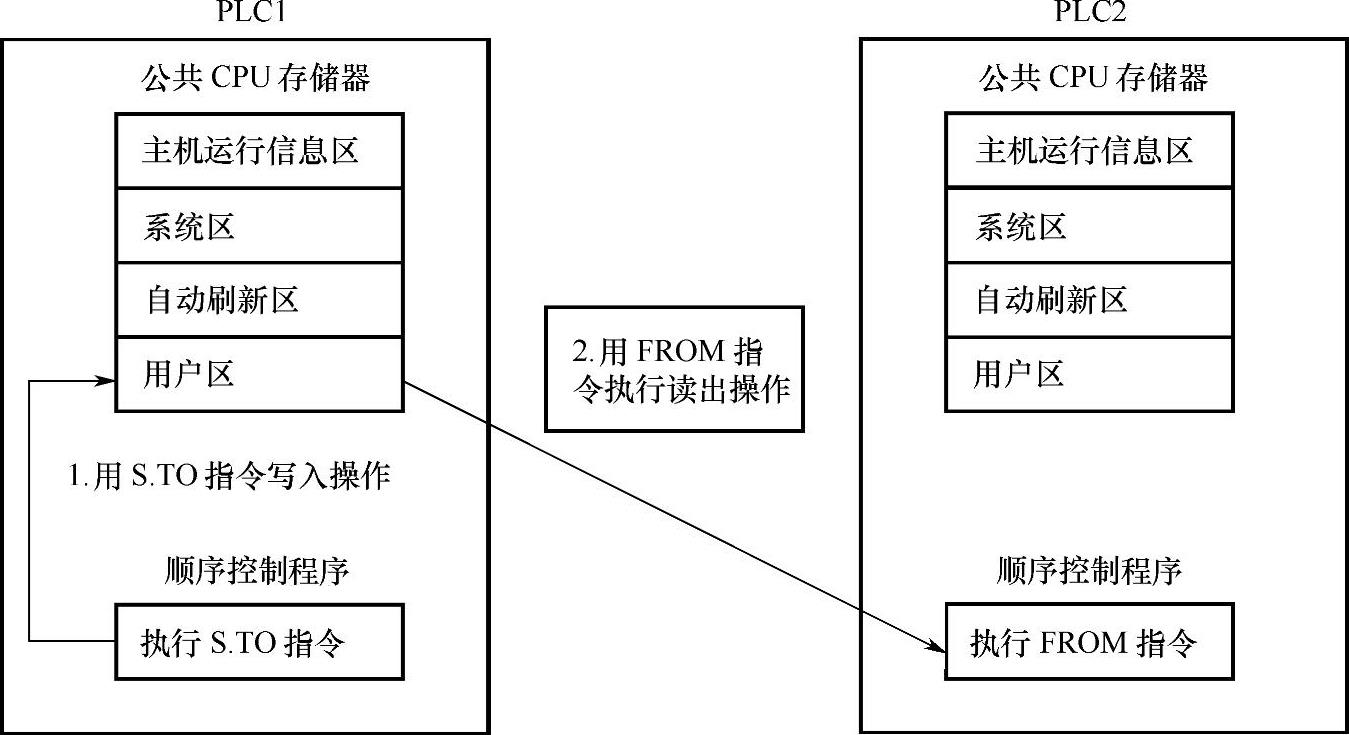
图10-7 多CPU系统FROM/TO指令
图10-7表述的意思如下:
1)用TO指令写入数据到PLC1的用户区(1.)。
2)用FROM指令从PLC1的用户区读出指定的数据(2.)。
用户可以参考Q系列CPU(Q模式)/QnA系列CPU编程手册(公共命令部分),以进一步了解FROM/TO指令的用法细节。
2.使用多CPU之间的专用通信指令直接读取软元件数据
如PLC顺序控制CPU和运动控制CPU之间的专用通信指令SFCS,意思就是在PLC顺序控制CPU端启动运动控制CPU里的SFC程序(具体的SFCS指令用法,请参考三菱电机公司运动控制器相关手册)。
有关三菱电机中大型可编程序控制器应用指南的文章

下面用一个实例来介绍如何组建多CPU系统,以及如何利用CPU间的自动刷新功能进行数据的传送。图10-11 多CPU系统的自动刷新示意图PLC顺序控制CPU侧的设置如下:1)图10-12所示为设置M软元件的自动刷新范围。运动控制CPU侧的设置如下:打开运动控制CPU对应的程序编写软件MT Developer,进入多CPU设置画面,进行相应的设置。当Q02HCPU的M3为ON时,退出SFC程序。......
2023-06-16

我们以3.1.2节的二进制数求和问题sum=x+y=5+7的机器指令程序为例来讨论CPU的工作原理。在程序执行状态下,CPU根据程序计数器中的数值,从内存单元0000000001中取出第一条机器指令,传送给指令寄存器。CPU的工作过程就是如图3-5所示的周而复始的取指令、分析指令和执行指令的过程。CPU处理转移指令的方法是把转移指令的操作数部分的数值赋予程序计数器,从而使CPU取到的下一条指令是非顺序的。......
2023-11-18

当进行多CPU系统的配置时,需要注意以下4点:1)一个多CPU系统最多可以放置4个CPU,其中必须要有一个PLC顺序控制CPU。2)各CPU之间不能留有空槽位。在进行多CPU系统的配置时,一般可以按照以下步骤进行:1.硬件配置在基板上把CPU按规定分别插好,然后把用到的各种模块也插到基板上。图10-3 多CPU的I/O分配图10-4 多CPU系统的I/O详细设置画面......
2023-06-16

在常规制动阶段,ABS并不介入制动压力控制,车轮的制动力由驾驶员脚踩制动踏板的力度决定。ABS系统在车辆的安装位置如图7-13所示。图7-14ABS系统的原理构成当车轮的加速度超过某一值时,再次将制动压力提高,使车轮滑移率稍微超过稳定界限,压力保持,车轮速度又下降。为避免ABS在较低的车速下制动时因制动压力的循环调节延长制动距离,ABS有最低工作车速的限制,一般来说汽车行驶速度超过8 km/h时,ABS才起作用。......
2023-06-23

燃烧系统由燃烧器、燃料喷油器、燃烧室、点火系统、后燃烧室等构成。主空气量占全空气量的15%~20%,通过主气流孔进入到内筒与燃料混合进行燃烧。图12-24 燃烧室出口无量纲温度分布最近,冷却涡轮工作叶片以提高涡轮进口燃烧气体温度的情况逐渐增多。燃烧气体温度为1600~1800℃,高于燃烧室火焰筒和涡轮材质的熔点。......
2023-06-28

系统的结构如图2-1所示,各部分的工作原理如下:风力发电部分利用风力机将风能转换为机械能,再通过风力发电机将机械能转换为电能。同时还具有自动稳压功能,可改善系统的供电质量。当发电量不能满足负载需要时,控制器把蓄电池的电能送往负载,或将可逆式水泵水轮机的运行工况调整为水轮机工况进行发电供给负载,保证了整个系统工作的连续性和稳定性。图2-1风—光—抽蓄复合发电系统图2-1风—光—抽蓄复合发电系统......
2023-06-23
但它是与遥控器及本机键盘的操作控制同步工作的。有关各继电器的开关控制线路可依实物的具体情况进行分析。在有些空调器中,传感器检测电路有多种形式,用于不同的功能检测,但它们的工作原理是一致的。......
2023-06-19
直流输电用来进行换流的有6脉动换流器和12脉动换流器,本节对12脉动换流器工作原理进行分析。图2.1所示为12脉动换流器原理接线图。因此,大部分直流输电工程均选择12脉动换流器作为基本换流单元,从而可简化滤波装置,降低换流站造价。12脉动换流器的工作原理与6脉动换流器相同,它也是利用交流系统的两相短路电流来进行换相。图2.2中E为交流系统的等值电动势,XS为交流系统的等值电抗。......
2023-06-29
相关推荐