图3-42 埋弧焊方法埋弧焊的焊接过程 如图3-42所示,埋弧焊时,焊剂由给送焊剂管流出,均匀地堆敷在装配好的焊件(母材)表面。由于钨极的载流能力有限,其电功率受到限制,所以钨极氩弧焊一般只用于焊接厚度小于6mm的工件。CO2气体保护焊可分为自动焊和半自动焊。......
2023-06-28
在GX Developer编程软件中,梯形图是应用最为广泛的一种编程方式。但是,考虑到步进控制的需要、复杂程序的简化以及大量数据的处理等情况,在GX Developer软件中还开发出了SFC(顺序功能流程图)、FB(功能块)、ST(结构化文本)和IL(指令列表)等编程方式。
步进控制的需要是指,在某些生产加工系统中,对生产机械或设备的动作顺序有着严格要求的场合(即只有当上一个动作运行完成后,才进行下一个动作的运行),而SFC顺序功能流程图正是针对这一控制要求开发出来的编程方式。
复杂程序的简化是指,把在顺序控制程序或ST程序中反复出现和使用的程序,转换成通用FB,并通过反复调用这些功能块的方式进行程序编写,以此来提高程序开发的效率并改善程序的品质。
大量数据的处理是指,如果用梯形图来编写数据处理和数据计算等程序,将会增加程序的复杂性,且可读性亦不强;而用ST的方式进行编程(即使用运算符、条件控制语句或函数的方式进行数据处理和数据计算的编程),则可以在简化程序的同时提高其可读性。
本章主要对SFC、FB和ST各个编程方式的特点进行说明,并通过指导用户编写SFC、FB和ST程序,使得用户可以在实际应用过程中读懂这类程序,同时掌握编写SFC、FB和ST程序的基本步骤和方法。SFC、FB和ST编程方式的主要区别见表7-1。
表7-1 SFC、FB和ST编程方式的主要区别
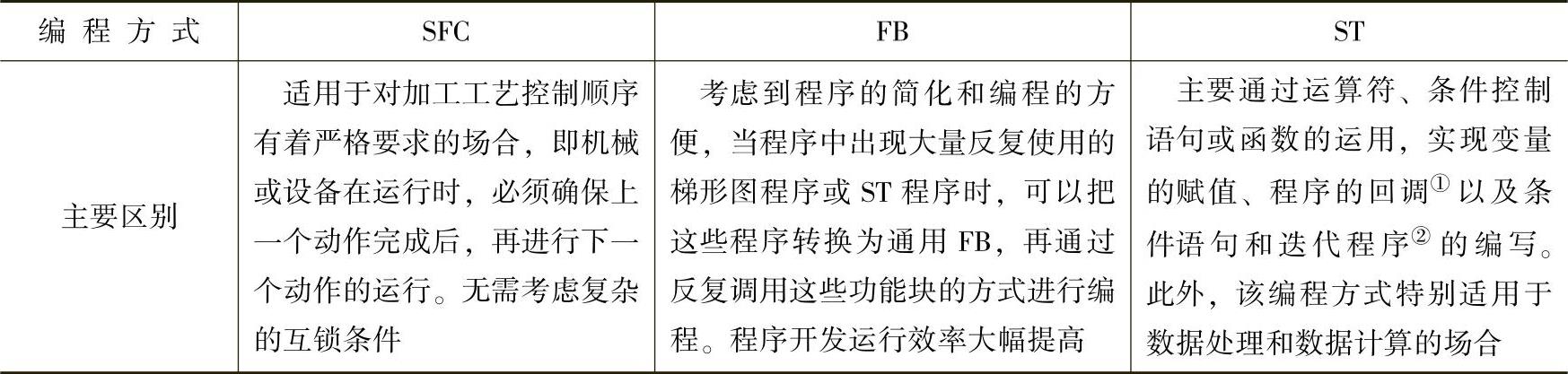
①程序的回调是指在ST程序中,实现对FB的反复调用。
②迭代程序用于需要一条或多条语句重复执行许多次的情况,其语句的执行取决于某一变量或条件的状态,如FOR...DO、WHILE...DO、REPEAT...UNTIL等语句的使用。
有关三菱电机中大型可编程序控制器应用指南的文章

图3-42 埋弧焊方法埋弧焊的焊接过程 如图3-42所示,埋弧焊时,焊剂由给送焊剂管流出,均匀地堆敷在装配好的焊件(母材)表面。由于钨极的载流能力有限,其电功率受到限制,所以钨极氩弧焊一般只用于焊接厚度小于6mm的工件。CO2气体保护焊可分为自动焊和半自动焊。......
2023-06-28

参考码元的宽度为对应时码索引计数间隔乘 0.8。B码为30位,其中天10位,时6位,分7位,秒7位。IRIG-B对时方式融合了脉冲对时和串口对时的优点,具有较高的对时精度(微秒级)。表6-5IRIG-B码码元定义表续表续表2.脉冲对时脉冲对时方式多使用空接点接入方式,主要有秒脉冲、分脉冲和时脉冲三种对时方式。3.串口报文对时串口对时方式是对时从设备通过串行口接收 GPS 时钟信息,来校正其自身的时钟。......
2023-06-28

在地震多发区使用的电梯,还应安装有地震感应器。(二)报警装置在紧急情况下能够与值班人员及时联系,电梯还必须设置必要的安全设施,其中包含五方对讲装置、紧急报警电源装置等。当电源恢复正常时,应急照明灯自动熄灭,在电源正常情况下处于充电备用状态,该装置也用于轿厢紧急报警装置在停电时的报警电源。......
2023-06-15

机器人语言已成为机器人技术的一个重要部分。自机器人出现以来,美国、日本等机器人的原创国也同时开始进行机器人语言的研究。美国IBM公司也一直致力于机器人语言的研究,并取得了不少成果。1984年,Unimation公司又推出了在VAL基础上改进的机器人语言——VALⅡ语言。这是因为机器人的功能不断拓展,需要新的语言来配合其工作。......
2023-06-26

钛及钛合金点焊的焊接参数见表5-27。由于钛合金焊丝电阻率较大,焊丝伸出长度要小。钛及钛合金扩散连接一般是在真空或氩气保护下进行。对于α+β钛合金,焊接温度应低于β转变温度40~50℃。......
2023-06-23

Xu和Zhang利用凝胶纺丝和热拉伸制备了聚乙烯醇/单壁碳纳米管复合纳米纤维,实验结果显示复合纳米纤维与纯聚乙烯醇纳米纤维结构基本相同,但是拉伸强度由1.7 GPa增加至2.2 GPa,其纤维拉伸断裂面扫描电镜图如图1-11所示。表1-3拉伸倍数对聚丙烯腈纤维以及碳纳米管/聚丙烯腈复合纤维机械性能的影响......
2023-06-23
PLC的软件由系统程序和用户程序组成。系统程序由PLC制造厂商设计编写,并存入PLC的系统存储器中,用户不能直接读写与更改。PLC是专门为工业控制而开发的装置。因此,这种编程语言为广大电气技术人员所熟知,是应用最广泛的PLC的编程语言,是PLC的第一编程语言。虽然各个PLC生产厂家的语句表形式不尽相同,但基本功能相差无几。只要转换条件满足,PLC就实现阶段转移,上一阶段动作结束,下一阶段动作开始。......
2023-06-20
相关推荐