由系统的传递函数框图可得EPC系统的开环传递函数为式中 k——开环放大系数,。将算得的ωh、ξh、k代入式,可据此画出EPC系统的开环伯德图。图12-18 改造前后CP机组EPC系统的开环伯德图由图12-18可得系统的性能指标为:①穿越频率:ωc=2.4Hz;②幅值裕量:h=16dB;③相位裕度:γ=75°。可见实测值和理论分析值比较接近,说明上面建立的EPC系统的数学模型和确定的参数是正确的,是可以作为预测改造后系统性能的依据的。......
2025-09-29
由上述分析可知:某硅钢片厂跑偏控制EPC系统可以简化成一个三阶系统。由于该系统的工作频率较低,所以它的快速性、稳定性和稳态精度等指标都主要由系统的开环放大系数决定。
上面从理论上分析了现有EPC系统及改造后EPC系统的动态特性,并实测了CP机组和CW机组(以CW1为例)的频宽,现将结果综合列在表12-3中。
表12-3 EPC系统的性能参数
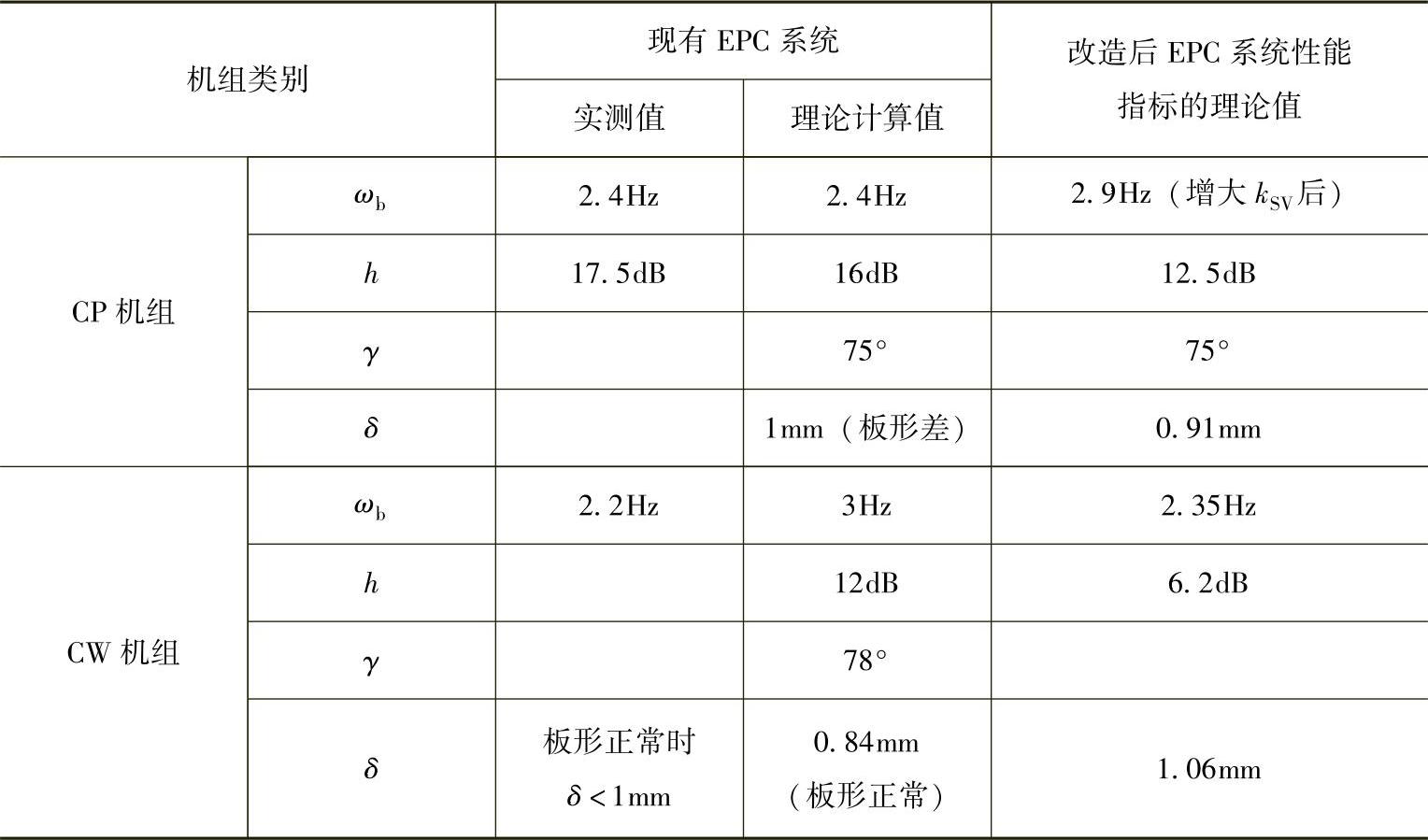
由表12-3可以看出:(https://www.chuimin.cn)
1)增大活塞有效面积和卷重后,系统的开环放大系数k将降低,快速性和卷取精度都受影响。
2)由于CP机组的稳定裕量(γ和h)较大,故可采用加大ka或kSV的方法来提高改造后系统的开环放大系数,以保持或提高系统的频宽及稳态精度。
3)对于CW机组,改造后采用了滚柱导轨,系统阻尼比ξh较小,振荡较大,使得幅值裕量比改造前减小很多。从稳定性要有足够的裕量考虑,已不允许单纯调大ka或kSV了,要改善该机组的性能可采用如下方法:设法增大阻尼比ξh,降低超调量,在增大h的基础上再适当调大ka或kSV;或者提高油压,适当减小液压缸工作面积A的增大量,A的减小既有利于增大ξh,又可加大k,但A的增大量也不能减小过多,否则将使ωh和ωc的间距不够大,影响系统的稳定性和快速性。
相关文章

由系统的传递函数框图可得EPC系统的开环传递函数为式中 k——开环放大系数,。将算得的ωh、ξh、k代入式,可据此画出EPC系统的开环伯德图。图12-18 改造前后CP机组EPC系统的开环伯德图由图12-18可得系统的性能指标为:①穿越频率:ωc=2.4Hz;②幅值裕量:h=16dB;③相位裕度:γ=75°。可见实测值和理论分析值比较接近,说明上面建立的EPC系统的数学模型和确定的参数是正确的,是可以作为预测改造后系统性能的依据的。......
2025-09-29

一般采用F级绝缘、IP54外壳保护等级。各品牌对公共交通型自动扶梯的动力配置不尽相同,但一般以80%左右的制动载荷作为额定载荷计算电动机功率,通常比普通自动扶梯高20%以上。减速箱 普通自动扶梯多采用造价较低的单级蜗轮蜗杆减速箱。常采用的有全齿轮减速箱、一级齿轮一级蜗轮的减速箱。减速箱的工作寿命设计应不小于140000h。梯级链条的安全系数应不小于5。一般要求在制动载荷条件下,销轴比压不大于25N/mm2。......
2025-09-29

S7-1200 PLC是西门子公司最新推出的面向离散自动化系统和独立自动化系统的紧凑型自动化产品,定位在原有的SIMATIC S7-200 PLC和S7-300 PLC产品之间。表1-1给出了目前S7-1200系列PLC不同型号CPU的性能指标。表1-1 S7-1200PLC系列CPU的性能指标注:随着电子技术的发展和新产品的推出,部分指标可能有所变化。S7-200 PLC是西门子专门应用于小型自动化设备的控制装置,主要包括CPU 22X系列,表1-2给出了S7-200系列PLC不同型号CPU的性能指标。......
2025-09-29

若k是按系统对稳态误差的要求选取的,则此项自然满足,可免去。需要校验的稳态误差可能包括:1.输入信号引起的误差e1)位置信号x=x0引起的误差eP。3)反馈传感器精度所引起的误差ε3不因k的改变而减少,故必须使反馈传感器有较高的精度。......
2025-09-29

卷取机工作时的EPC系统工作原理框图如图12-16所示,对应的EPC系统传递函数框图如图12-17所示。图12-15 EPC控制系统构成图12-16 EPC系统工作原理框图xi—钢带位移的偏移 xo—输出的纠偏位移其中,k1为光电头的比例系数,经计算,k1=12V/m;ka为电放大器增益;R为阀线圈阻抗;Gsv为伺服阀的传递函数;Gh为液压缸负载环节的传递函数。图12-17 EPC系统传递函数框图经实测,ka=117,R=20Ω。......
2025-09-29
低周疲劳的循环应力往往是很高的,这种疲劳往往接近或超过材料的屈服强度,材料在每次应力循环中,都会产生一定量的塑性变形。由于构件在热膨胀及冷收缩时受到约束,因而在局部或不均匀区产生较大的局部变形,同时伴有较大的应力集中,容易引起热疲劳裂纹和损坏,降低钢的疲劳强度。......
2025-09-29

图9-16 精轧机AGC液压调整系统组成2.精轧机AGC液压系统精轧机AGC液压调整系统由两个双动作液压缸与机架组成,如图9-16所示。AGC液压缸传动侧和操作侧分别采用单独的位置控制系统,两套位置控制系统之间又有同步控制。一般热轧精轧机组具有7架连轧机,每两个机架间设置一个活套,采用伺服阀驱动的液压活套控制系统。套量控制与轧机主传动速度控制系统的关系密切。活套张力控制是以活套位置为反馈信号的机架间带钢控制系统。......
2025-09-29

多准则决策分析主要包括数据准备及预处理、缓冲区分析、缓冲区域分级权重赋值、按权重叠置分析、输出结果专题地图等步骤。图3.26纽约市消防站负荷状况从数学的角度,缓冲区定义为给定一个空间对象或集合,确定其邻域,邻域半径即缓冲距离(宽度),是缓冲区分析的主要数量指标,可以是常数或变量。按照表3.12的划分依据,通过叠置分析将服务区划分为低值区、中值区、高值区三个等级,从而得到纽约市医院空间布局优化图。......
2025-09-29
相关推荐