取滞后部分第二个转折频率为则有,则T2=100,由此可得,滞后—超前校正装置的传递函数为其伯德图,如图6-11中Lc和φc所示。图6-11例6-3系统串联滞后—超前校正伯德图......
2023-06-28
滞后-超前校正(先滞后,后超前)是在低频段实施滞后校正,在高频段实施超前校正,综合了两种校正的效果,即先滞后,后超前。滞后-超前校正环节的传递函数为:

滞后-超前校正环节的伯德图如图12-12所示。环节的四个转折频率分别为 、
、 、
、 、
、 。低频段具有负的斜率和负的相位差,起滞后校正作用。高频段具有正的斜率和正相移,起超前校正的作用。伯德图中的几何参数与单独的滞后和超前校正环节相同,最大衰减量
。低频段具有负的斜率和负的相位差,起滞后校正作用。高频段具有正的斜率和正相移,起超前校正的作用。伯德图中的几何参数与单独的滞后和超前校正环节相同,最大衰减量 ,最大超前角φm和最大滞后角φm(相等)都发生在各自两个转折频率的几何中点。
,最大超前角φm和最大滞后角φm(相等)都发生在各自两个转折频率的几何中点。

图12-12 滞后-超前校正环节的伯德图
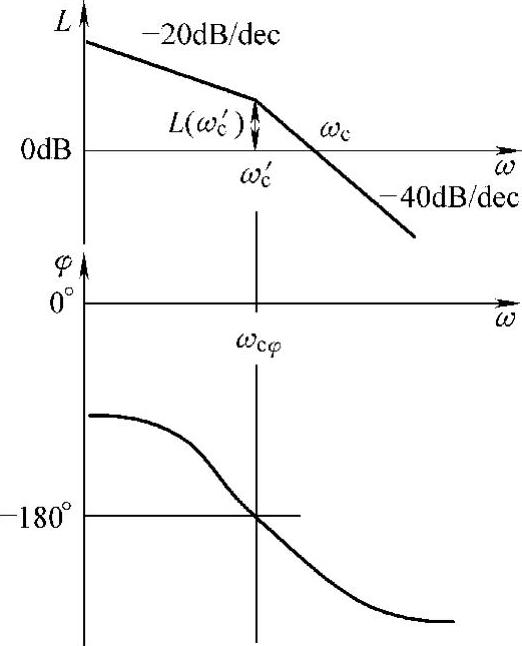
图12-13 原系统的开环伯德图
1.校正原理
低频部分利用校正环节的滞后部分以改善系统的稳态精度。高频部分利用校正环节的超前部分以提高相位裕量而同时又保证足够的频宽。
2.综合滞后校正及超前校正确定校正环节参数的方法
该方法相当于滞后校正及超前校正时参数确定的方法的综合,先按确定超前环节参数α的方法来确定β(β=1/α),再按确定滞后环节转折频率的方法确定T2。
(1)按稳定误差的要求确定系统的开环放大系数k 根据k及开环传递函数画出原系统的开环伯德图,如图12-13所示。在图中确定相位稳定裕量γ及相频交界频率ωcφ和幅值裕量h,h=-L(ωcφ)。
(2)选择校正后系统的幅频剪切频率ω′c,使得ω′c=ωcφ 从理论上讲,校正后系统的相位裕度就应正好等于校正环节在该频率处的相位数。与超前环节相同,为充分利用校正环节和该超前特性,应使该相位数就是校正环节的最大相位超前量φm。该方法只适用于原系统完全不稳定,即ωcφ<ωc的系统。
为了补偿计算和作图中发生的误差,应留5°的余量,故φm=γ0+5°,其中γ0是设计中要求系统达到的相位裕度指标。
(3)由φm按下述公式计算β
(4)由ω′c确定T2 校正环节滞后部分的第一个转折频率 (较大者)按下式确定:
(较大者)按下式确定:
从而校正环节滞后部分的另一转折频率 也可求得,进而相位滞后部分的传递函数
也可求得,进而相位滞后部分的传递函数 即被求得,相位滞后部分的总衰减量
即被求得,相位滞后部分的总衰减量 。
。
(5)校正环节超前部分的两个转折频率可由作图法确定
1)原理:因为校正环节超前部分斜线的斜率为+20dB/dec,由图12-12和图12-13可知,为使校正后的系统稳定,必须使校正环节在ω′c处的幅值满足Lc(ω′c)=-L(ω′c)=-L(ωcφ)。所以,校正环节超前部分的斜线必过点[ω′c,-L(ω′c)]。
2)方法(见图12-12):在对数坐标纸上先画出滞后部分的幅频曲线,再过点[ω′c,-L(ω′c)]作一斜率为+20dB/dec的斜线,该线与0dB线交点的频率即为超前部分的较大的转折频率 ,该线与滞后部分下水平线
,该线与滞后部分下水平线 线的交点处的频率即为超前部分较小的转折频率
线的交点处的频率即为超前部分较小的转折频率 。
。
由此即可确定总的滞后-超前校正环节。
该校正环节的所有参数全是按系统要求的性能指标来确定的,串联此校正环节后,虽然系统的性能指标得以改善,但是会使系统的阶次增加二次,使系统变得更加复杂,为了克服这一缺点,我们可采取另一种方法来确定校正环节的参数。
3.少增加校正后系统阶次的参数确定方法
1)根据稳态误差的要求,确定系统的开环放大系数k。
2)根据k,绘制未校正系统的对数频率特性,确定其剪切频率ωc和相位裕度γ。
3)在未校正系统的幅频曲线上选斜率从-20dB/dec变为-40dB/dec的转折频率作为校正环节超前部分较小的那个转折频率(1/T)。
这样选择的好处是:第一,可以使校正后系统的阶次只增加一阶,这是因为校正环节传递函数的分子中将有T1s+1这一项,而原来系统传递函数的分子中也有T1s+1这一项,串联后二者可以相消;第二,可保证校正后系统的幅频曲线以-20dB/dec的斜率穿越0dB线,稳定性好;第三,可占据较宽的频带,快速性好。
4)根据对时域响应速度指标的要求,选择校正后系统的剪切频率ω′c。
①若要求的调整时间小于ts,要求的相位余量为γ0,则根据公式
可确定ω′c,或由图12-14所示曲线可得ω′c的下限。

图12-14 γ0、ts、ωc关系曲线
②ω′c的上限应小于未校正系统中幅频曲线的斜率由-40dB/dec向-60dB/dec(或-80dB/dec)转折时的交接频率,这样才能保证校正后的曲线以-20dB/dec的斜率穿越0dB线。
③通常使得ω′c稍大于下限,能满足调整时间ts的要求即可。
5)由ω′c确定β。为了使L(ω′c)=0,应使校正环节的最大衰减量 和原系统在ω′c处的幅值L(ω′c)之和等于0,即
和原系统在ω′c处的幅值L(ω′c)之和等于0,即
故20lgβ=L(ω′c)。
6)由已确定的T1和β写出包含未知参数T2的校正后系统的传递函数:

校正后系统的频率特性为s→jω,

7)估算确定γ′。若系统要求的相位裕度指标为γ0,则可取γ′≥γ0。
8)写出包含未知参数T2的校正后系统的相角裕度γ′的表达式:

求解此式,即可得T2,此值是T2的下限。当然T2也不可选择过大,否则βT2更大,过大的时间常数是不容易实现的。由于γ′=180°+φ′(ω′c),故只要使T2稍大于下限即可。
有关现代冶金设备液压传动与控制的文章

取滞后部分第二个转折频率为则有,则T2=100,由此可得,滞后—超前校正装置的传递函数为其伯德图,如图6-11中Lc和φc所示。图6-11例6-3系统串联滞后—超前校正伯德图......
2023-06-28

当待校正系统不稳定,且要求校正后系统的响应速度、相角裕量和稳态精度较高时,采用滞后—超前校正为宜。其基本原理是利用滞后超前网络的超前部分来改善系统的相角裕量,同时利用滞后部分来改善系统的稳态性质。下面举例说明使用Matlab进行滞后—超前校正的设计步骤。运行程序,可以得到超前装置、滞后校正装置和校正后系统的传递函数分别如下:校正后的相角裕量为48.1°,幅值裕度为10.2dB,校正后的Bode图如图6-25所示。图6-25校正后系统的Bode图......
2023-06-28
由于超前校正环节相频特性曲线具有正的相角,幅频特性具有正的斜率,所以校正后系统Bode图的低频不变,而其剪切频率和相角裕量比原系统的大,这说明校正后系统的快速性和稳定性得到了提高。下面举例说明使用MATLAB对系统进行超前校正的设计步骤。根据稳态误差的要求调整K的值。画出未矫正系统的Bode图,校验性能指标是否满足要求。由图6-22可以看出,校正后系统的剪切频率和相角裕量满足了设计的要求。图6-22超前校正前、后系统的Bode图......
2023-06-28

图12-10 积分校正环节的伯德图积分校正环节的数学模型为,其伯德图如图12-10所示。积分校正环节的参数选择也基于上述原理。6)滞后环节的另一较小的交接频率。......
2023-06-15

微分(超前)校正环节的数学模型为,其伯德图如图12-11所示。图12-11 微分校正环节的伯德图1.校正原理使校正环节的两个转折频率[1/T和1/(αT)]分别位于原系统剪切频率ωc的两侧,则校正后系统的幅频曲线在ωc附近的那一段将上移,幅值裕量将增加。......
2023-06-15

在前面二阶系统性能改善采用的输出量的速度负反馈控制就是局部反馈校正结构图如图6-17所示。图6-18具有速度负反馈校正系统的伯德图引入速度负反馈控制后系统的开环对数幅频特性曲线如图6-18中Lk所示,其对应的传递函数为式中,由式可见,采用输出量的速度负反馈控制,即局部反馈校正后系统仍具有相同数目的积分环节,并没有改变开环传递函数的形式,但改变了系统的参数,开环放大系数和时间常数都减小到了原来的K倍。......
2023-06-28

图6-3相位超前校正装置伯德图图6-4是一个无源相位超前校正网络的电路图。由图求出原系统截止频率ωc0=3.5rad/s,相位裕量γ0=16°<γ*,可考虑采用超前校正。在有些情况下,串联超前校正的应用会受到限制。这是因为校正后系统的截止频率会向高频段移动,在新的截止频率处,由于未校正系统的相位滞后量过大,所以用单级超前校正网络难以获得所要求的相位裕量。......
2023-06-28

图6-47未校正系统输出显示与测量结果图6116 添加“渐变叠加”图层样式图6-48校正后系统输出显示与测量结果从图6-47、图6-48输出结果可知,基于所设计软件的输出结果与上述仿真、实验结果基本一致,验证了软件功能的有效性。校正后线性系统的时域性能指标提取程序设计方法与上述6.3中相同,请扫描6.3节二维码获取。......
2023-06-21
相关推荐