取滞后部分第二个转折频率为则有,则T2=100,由此可得,滞后—超前校正装置的传递函数为其伯德图,如图6-11中Lc和φc所示。图6-11例6-3系统串联滞后—超前校正伯德图......
2023-06-28
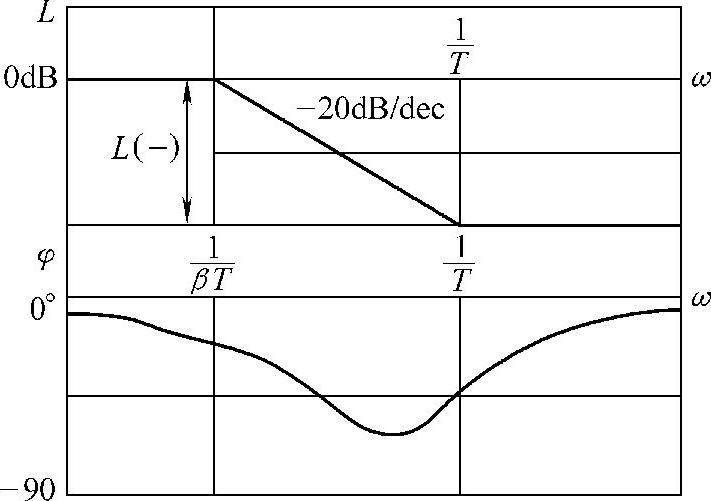
图12-10 积分校正环节的伯德图
积分校正环节的数学模型为 (其中,T为时间常数,s为数学模型的自变量,β为衰减系数,β>1),其伯德图如图12-10所示。校正时利用的是其高频部分幅值衰减的特性。其幅值衰减量为
(其中,T为时间常数,s为数学模型的自变量,β为衰减系数,β>1),其伯德图如图12-10所示。校正时利用的是其高频部分幅值衰减的特性。其幅值衰减量为 ,其中β越大,衰减量L(-)的绝对值越大,故β称为衰减系数。
,其中β越大,衰减量L(-)的绝对值越大,故β称为衰减系数。
1.校正原理
由于幅值衰减,就可使幅频曲线提前与0dB线相交(使剪切频率减小),这样就增加了相位裕度。当然,还须使得滞后环节的相位滞后区离开剪切频率附近,也就是使得它的两个转折频率 、
、 都远远小于校正后系统的剪切频率ω′c,这样剪切频率附近的相位滞后才不致加剧(当然相位滞后总会有少许的),才能保证校正后相位裕度的增加。
都远远小于校正后系统的剪切频率ω′c,这样剪切频率附近的相位滞后才不致加剧(当然相位滞后总会有少许的),才能保证校正后相位裕度的增加。
积分校正环节的参数选择也基于上述原理。
2.参数确定
确定参数的步骤如下:
1)根据系统稳态误差的要求,确定系统的开环放大系数k。
2)利用已确定的k值,画出未校正的原系统的开环对数频率特性曲线L(ω)和φ(ω),并确定其幅值裕量h和相位裕度γ,若稳定裕量不能满足规定指标,则应加校正。
3)首先找出一个频率点作为系统校正后新的剪切频率ω′c,ω′c可在原系统的相频曲线上按下式确定:
φ(ω′c)=-180°+γ0+Δφ
式中 γ0——设计要求的相位裕度指标;
Δφ——为了补偿,加入校正后,滞后环节总会引起的(滞后峰值可以避
开,但不能一点没有)附加的相位滞后,Δφ=5°~12°。
4)确定滞后环节的较大的那个交接频率 ,使得
,使得
 ,即可确定T(Δφ取大值时,系数取大值)。
,即可确定T(Δφ取大值时,系数取大值)。
5)在原幅频曲线L(ω)上找出ω′c点的幅值L(ω′c);为了使该ω′c的幅值在校正后为0dB(即成为校正后的剪切频率ω′c),必须有 ,由此即可确定β。
,由此即可确定β。
6)滞后环节的另一较小的交接频率 。
。
这样,滞后环节的参数就全部确定了。
符号说明:符号“′”代表校正后系统的参数,如φ′、L′、ω′c分别代表校正后系统的相频、幅频和剪切频率。
有关现代冶金设备液压传动与控制的文章

取滞后部分第二个转折频率为则有,则T2=100,由此可得,滞后—超前校正装置的传递函数为其伯德图,如图6-11中Lc和φc所示。图6-11例6-3系统串联滞后—超前校正伯德图......
2023-06-28

滞后-超前校正环节的传递函数为:滞后-超前校正环节的伯德图如图12-12所示。低频段具有负的斜率和负的相位差,起滞后校正作用。图12-12 滞后-超前校正环节的伯德图图12-13 原系统的开环伯德图1.校正原理低频部分利用校正环节的滞后部分以改善系统的稳态精度。由此即可确定总的滞后-超前校正环节。......
2023-06-15

当待校正系统不稳定,且要求校正后系统的响应速度、相角裕量和稳态精度较高时,采用滞后—超前校正为宜。其基本原理是利用滞后超前网络的超前部分来改善系统的相角裕量,同时利用滞后部分来改善系统的稳态性质。下面举例说明使用Matlab进行滞后—超前校正的设计步骤。运行程序,可以得到超前装置、滞后校正装置和校正后系统的传递函数分别如下:校正后的相角裕量为48.1°,幅值裕度为10.2dB,校正后的Bode图如图6-25所示。图6-25校正后系统的Bode图......
2023-06-28

由图可见,相位滞后装置在频率之间呈积分效应,对数相频特性呈滞后特性,故称为相位滞后校正装置。同样,可计算出最大滞后频率最大滞后角图6-6相位滞后装置的伯德图由图6-6可见,滞后校正装置在低频时的幅值为0dB,高频时幅值为20lgβ,是负值。所以,滞后校正以减小截止频率来换取相位裕量的提高。而且,只有那些原系统的低频段具有满足性能要求的相位储备的系统才能采用滞后校正。......
2023-06-28

PLC以循环扫描的方式工作,从PLC的输入端信号发生变化到PLC输出端对该输入变化做出反应,需要一段时间,这种现象称为PLC输入/输出响应滞后。但是PLC的扫描周期一般为几十毫秒,对于一般的工业设备不会影响系统的响应速度。即使在某个扫描周期干扰侵入并造成输出值错误,由于扫描周期时间远远小于执行器的机电时间常数,因此当它还没有来得及使执行器发生错误的动作,下一个扫描周期正确的输出就会将其纠正,使PLC的可靠性显得更高。......
2023-06-23
触发电路的输出环节一般由脉冲变压器及其它一些元件组成,如图1-57所示。设计脉冲变压器TM时,不仅考虑输出脉冲的幅度和宽度,同时要考虑变压器的内阻。对于宽脉冲的脉冲变压器,铁芯截面应取得大些,绕组线径取粗些,初、次级匝数可按公式计算。根据不同的电路和要求,在脉冲变压器初、次级可加接图1-57中的全部或部分元件。图1-57触发电路的输出环节电阻R2的作用是调节和限制输出触发电流,其数值约50~1kΩ之间。......
2023-06-20

由于超前校正环节相频特性曲线具有正的相角,幅频特性具有正的斜率,所以校正后系统Bode图的低频不变,而其剪切频率和相角裕量比原系统的大,这说明校正后系统的快速性和稳定性得到了提高。下面举例说明使用MATLAB对系统进行超前校正的设计步骤。根据稳态误差的要求调整K的值。画出未矫正系统的Bode图,校验性能指标是否满足要求。由图6-22可以看出,校正后系统的剪切频率和相角裕量满足了设计的要求。图6-22超前校正前、后系统的Bode图......
2023-06-28

松开SB2,虽然其自动复位,但KM线圈继续通电,电动机M连续运行实现长动控制。图2-47 单向长动控制电路为避免电动机等电器和操作者受到不正常工作状态的有害影响,使机床动作更可靠,控制电路均增设有保护环节。利用接触器KM2将电动机M的三相电源进线中任意两相对调,可以实现电动机M的反转控制。......
2023-06-23
相关推荐