一般采用F级绝缘、IP54外壳保护等级。各品牌对公共交通型自动扶梯的动力配置不尽相同,但一般以80%左右的制动载荷作为额定载荷计算电动机功率,通常比普通自动扶梯高20%以上。减速箱 普通自动扶梯多采用造价较低的单级蜗轮蜗杆减速箱。常采用的有全齿轮减速箱、一级齿轮一级蜗轮的减速箱。减速箱的工作寿命设计应不小于140000h。梯级链条的安全系数应不小于5。一般要求在制动载荷条件下,销轴比压不大于25N/mm2。......
2025-09-29
改变系统的开环放大系数k时,开环伯德图的幅频曲线只升高或降低一个常数,曲线的形状不变,其相频曲线也不变。伯德图上幅频曲线的低频段、穿越频率以及幅值增益裕量分别反映了闭环系统的稳态精度、截止频率及系统的稳定性,所以可根据闭环系统所要求的稳态精度、频宽以及相对稳定性,通过在开环伯德图上调整幅频曲线位置的高低,来获得与闭环系统要求相适应的开环放大系数k值。
确定系统开环放大系数k有三种方法。
1.根据系统的稳定性要求确定开环放大系数k
若要求幅值稳定裕量为4~6dB,可取k=(0.1~0.25)ωh,其中执行件液压固有频率ωh按下式计算:
式中 V0——高压腔容积;
βe——液压油有效体积弹性模数;
m——运动部件折算质量;
Ap——液压缸承压面积。
2.按系统的控制精度要求确定开环放大系数k
例如,要求系统允许的最大误差为ε1。
1)对一型系统:一型系统对速度输入信号x(t)=vt的稳态误差为 ,要使
,要使 ,必有
,必有 。
。
2)对二型系统:二型系统对加速度输入信号 的稳态误差为
的稳态误差为 ,要使
,要使 ,必有
,必有 。(https://www.chuimin.cn)
。(https://www.chuimin.cn)
3)对0型系统:0型系统对阶跃信号x(t)=z的稳态误差为 ,要使
,要使 ,必有
,必有 。
。
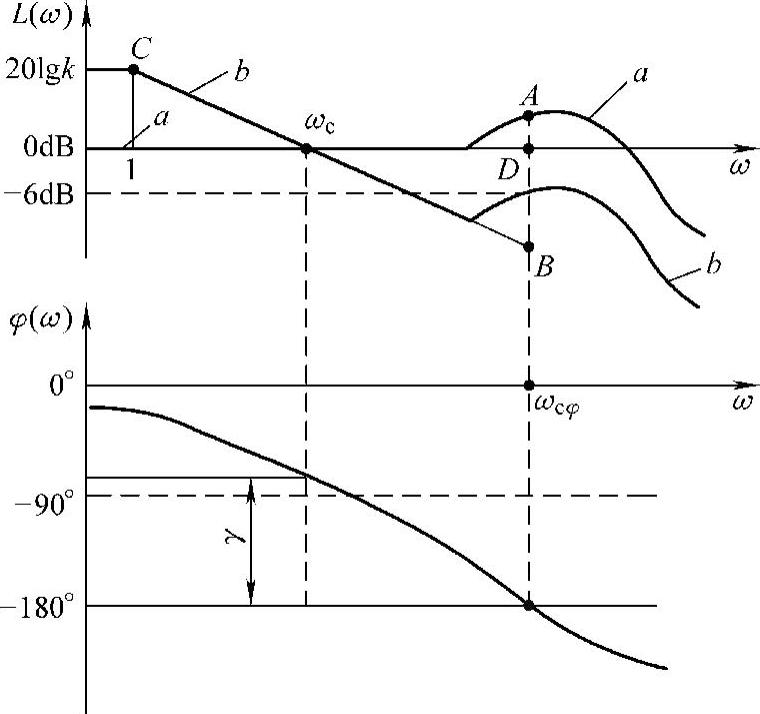
图12-9 伯德图法确定开环放大系数k
4)若考虑的是系统对一般输入指令或干扰信号的误差,则该误差可由各自的误差传递函数的总增益求出。该总增益中必包含开环放大系数k。
3.伯德图法确定开环放大系数k
1)在同一横坐标(ω)画上系统中除了k和1/s以外的所有环节的对数幅频特性曲线a和整个系统所有环节的相频特性,如图12-9所示。
2)找出相频曲线与-180°线交点处的频率ωcφ(相频截止频率),在曲线a上找出L(ωcφ)的大小,L(ωcφ)=AD。
3)在AD下方确定一点B,使-DB+AD=-6dB。
4)过B作一斜率为-20dB/dec的直线,交ω=1线于点C,则C点的dB值就等于20lgk。
5)曲线b就是整个系统的对数幅频特性曲线。
作图法(俗称归一法)实际上也是按系统对幅值裕量的要求(-6dB)来确定k的,与方法1本质相同。其一般步骤是令k=1,作出系统的伯德图后再上下平移幅频曲线,得出使其幅值裕度为-6dB时的C点位置,即确定了20lgk值。
相关文章

一般采用F级绝缘、IP54外壳保护等级。各品牌对公共交通型自动扶梯的动力配置不尽相同,但一般以80%左右的制动载荷作为额定载荷计算电动机功率,通常比普通自动扶梯高20%以上。减速箱 普通自动扶梯多采用造价较低的单级蜗轮蜗杆减速箱。常采用的有全齿轮减速箱、一级齿轮一级蜗轮的减速箱。减速箱的工作寿命设计应不小于140000h。梯级链条的安全系数应不小于5。一般要求在制动载荷条件下,销轴比压不大于25N/mm2。......
2025-09-29

大型电力系统的供电地区幅员宽广,电源和负荷的分布情况比较复杂,频率调整难免引起网络中潮流的重新分布。图6-7互联系统的功率交换图6-7表示系统A和B通过联络线组成互联系统。因此,对于系统A有对于系统B有互联系统应有相同的频率,故,ΔfA=ΔfB=Δf。当A、B两系统都进行二次调整,而且两系统的功率缺额又恰同其单位调节功率成比例,即满足条件时,联络线上的交换功率增量ΔPAB便等于零。这时,系统频率质量无法保证。......
2025-09-29

为了对比,采用了两组弹簧进行实验,其原长均为36mm,而刚度系数分别为根据上述仿真结果、优化设计出的2.4N/mm,和不满足设计要求的3N/mm。......
2025-09-29
断路器操作机构的疲劳问题主要是由闭合与分断过程中的动态应力应变引起,因此对断路器操作机构疲劳寿命评估的前提是分合闸过程中零部件动态应力应变的准确计算。动态应力应变的计算基于柔性体的瞬态动力学分析,瞬态动力学分析是用于确定结构在承受任意随时间变化的载荷时的动力学响应的一种方法。常用的瞬态动力学求解方法包括:完全法、缩减法、模态叠加法,本章中柔性体应力应变的计算使用模态叠加法。......
2025-09-29

图9-16 精轧机AGC液压调整系统组成2.精轧机AGC液压系统精轧机AGC液压调整系统由两个双动作液压缸与机架组成,如图9-16所示。AGC液压缸传动侧和操作侧分别采用单独的位置控制系统,两套位置控制系统之间又有同步控制。一般热轧精轧机组具有7架连轧机,每两个机架间设置一个活套,采用伺服阀驱动的液压活套控制系统。套量控制与轧机主传动速度控制系统的关系密切。活套张力控制是以活套位置为反馈信号的机架间带钢控制系统。......
2025-09-29
针对某型固定鸭舵式二维弹道修正智能榴弹, 对固定鸭舵的制动控制是弹道修正的关键技术。结合固定鸭舵的受力和运动特性, 从上述两种控制方案中进行优选。其次, 从固定鸭舵的控制对磁力矩电机提出的要求角度考虑。固定鸭舵滚转一周的时间约为0.033 s, 在如此短的时间内实现多次无偏差速度控制, 对磁力矩电机的响应速度提出了很高的要求, 且由于固定鸭舵飞行环境干扰的复杂性, 控制的精度很难保证。......
2025-09-29
事实上芯片直接附在母板上,这样做的目的是:1)将互连芯片直接附于母板可以减小照明系统的尺寸;2)能够设计出基于阵列或其他特定图案的紧凑型照明系统;3)通过限制器件的热阻来降低总热阻。事实上,在这些末端应用中,散热需求和芯片与基片间的CTE失配会成为关键性问题。......
2025-09-29

轧件方面的因素1)热轧板卷的纵向厚度偏差。作为冷轧原料的热轧板卷在纵向的厚度差会造成轧制过程中压下量的改变,从而引起轧制力的波动,导致辊缝发生偏差,使轧出厚度发生变化。而电动机械压下系统惯性大、速度慢、精度低,显然不能满足上述要求。因为液压压下系统有自动及快速卸压装置,故可以防止轧辊及其轴承的过载和损坏。......
2025-09-29
相关推荐