图5-4-1 上端部转向导轨系统结构示意图图5-4-2 上端部转向导轨系统工作原理示意图梯级向下运行时 前进侧系统是松边,返回侧系统为张紧边。由于梯级主轮的轮毂外圆与驱动链轮的齿槽啮合后沿上部链轮轴旋转,随后进入前进侧主轮导轨水平直线段;副轮则由返回侧直线段副轮导轨进入转向壁上的转向导轨,随后进入前进侧副轮水平导轨。这样当主轮从驱动链轮过渡到水平直线导轨时能平稳地滚动,所以过渡平稳、冲击小、无噪声,链条张力变化小。......
2025-09-29
LED是一种电子器件,只允许电流单方向通过,电流通过时LED会发光。
与普通二极管一样,LED为一片半导体材料基片,与杂质相互渗透或掺杂形成pn结。稳态时,极性相反的载流子(电子和空穴)因形成的空间电荷区而无法穿过结区。
当LED的pn结正向偏置时,与其他二极管一样,电流可以十分容易地从p区(阳极)流向N区(阴极),但不能反向流动。当电子穿过pn结从n型材料进入p型材料时,电子和空穴的复合过程中会产生光子,这一过程被称为电致发光。因此暴露的半导体表面可以发光。
LED本质上是单色的,转换效率取决于发射的波长。图1-13为一种直接带隙半导体的能带图。
在位于导带能量最小处的电子和位于价带能量最大处的空穴辐射性复合期间(k=0),一个光子以某一频率发射:
hν1=Eg=EC-EV (1-1)
式中,h为普朗克常数。
如图1-13所示,当k≠0时,电子空穴复合时发射光子的频率ν2与ν1稍有不同。所以LED将发射出中心频率为ν1、半最大值全宽度(FWHM)为ΔνFWHM的光线。其宽度可根据能区E±ΔE内的电子密度和能区内半导体的能态进行估计。对于工作温度为T、带隙能量为Eg的pn结,电子密度由玻尔兹曼定律表达,且与exp(-E/kBT)成正比。在相同条件下,能级强度与(E-Eg)1/2成正比。所以理论上的FWHM为
ΔEFWHM=hΔνFWHM=1.8kBT (1-2)
但是强度最大时的频率νmax≠ν1:

因此,对于工作在25℃、Eg=2.5eV的pn结而言,可以得出λmax≈490nm并且ΔλFWHM≈9nm。所以可以认为它发出的光是准单色的,因为实际中,在光源的世界里,存在宽度超过20nm的光线。
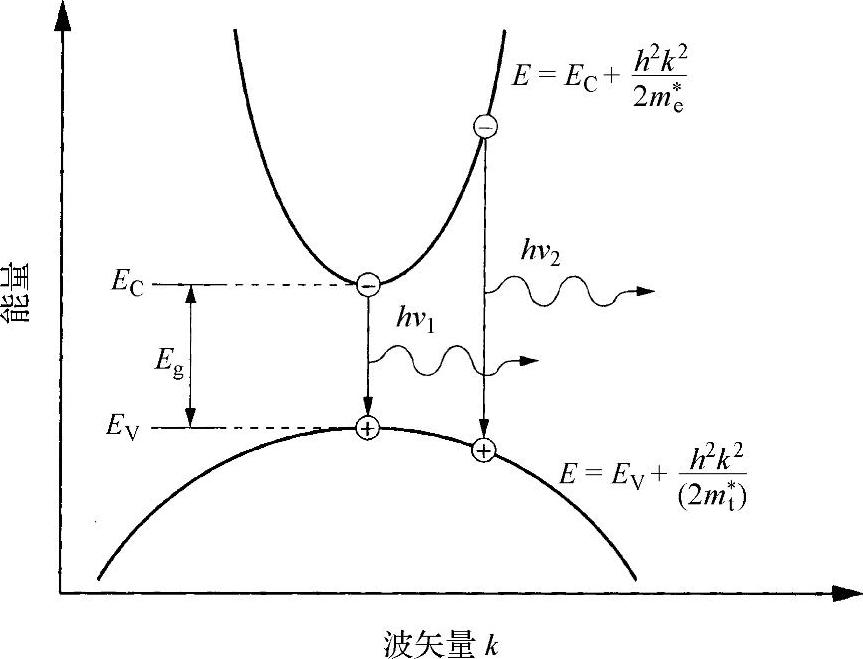
图1-13 一种直接带隙半导体的能带图
 (https://www.chuimin.cn)
(https://www.chuimin.cn)
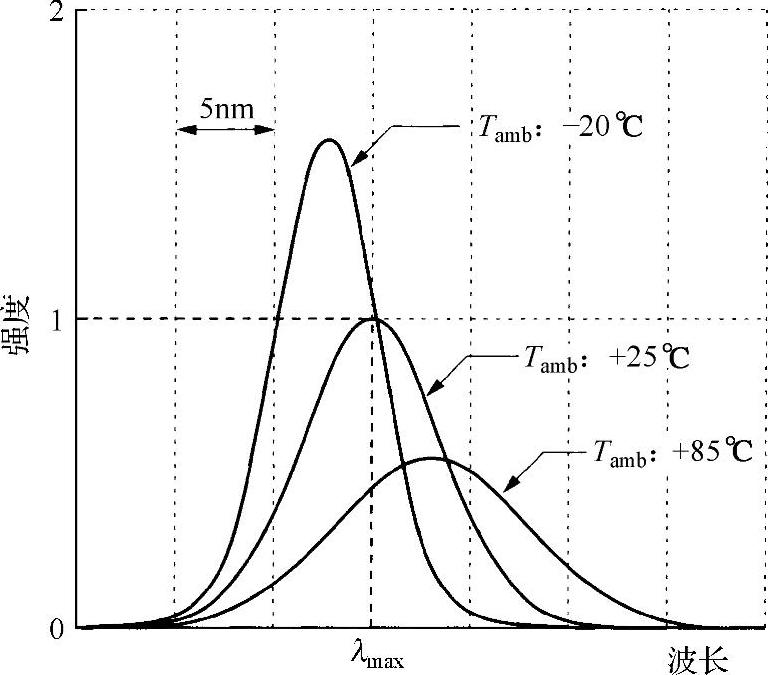
图1-14 LED发出准单色光谱,但光的 强度和光谱宽度与结温密切相关
实际中,第1个商用LED是红色的。如今,几乎所有饱和色都可以获得。
注意式(1-2)和式(1-3)得到的值与结温密切相关,所以如果结温发生变化,LED的颜色将随着时间发生彻底的改变(见图1-14)。当温度升高时,光谱向波长更长的方向移动(例如从黄色变为红色)。这种移动的速度是0.1nm/℃[13]。
图1-15给出了若干种著名半导体和二元系统的带隙能量和发射的波长。从红外线到近紫外线的所有波长均可以获得。由于工艺上的原因,只有直接带隙半导体可用于高亮度LED。间接带隙半导体的应用目前仍十分有限。
还注意到不同颜色的发光效率相差甚远(见图1-16)。从同一图中还可以看出,对于目前最常用的两族半导体(InGaN和AlInGaP),当波长接近最大人眼灵敏度时,效率迅速降低。
LED全面进入普通照明市场的一个关键问题是要获得效率大于100lm/W的“高功率白光LED”,然而目前市场中大多数功率器件的效率只有30~40lm/W。

图1-15 一些著名半导体和二元系统的带隙能量波长
注:只有直接带隙半导体(浅灰色线条)适合于高亮度LED。间接带隙半导体(黑色线条)目前几乎没有应用。曲线表示人眼灵敏度V(λ)与能量的关系。
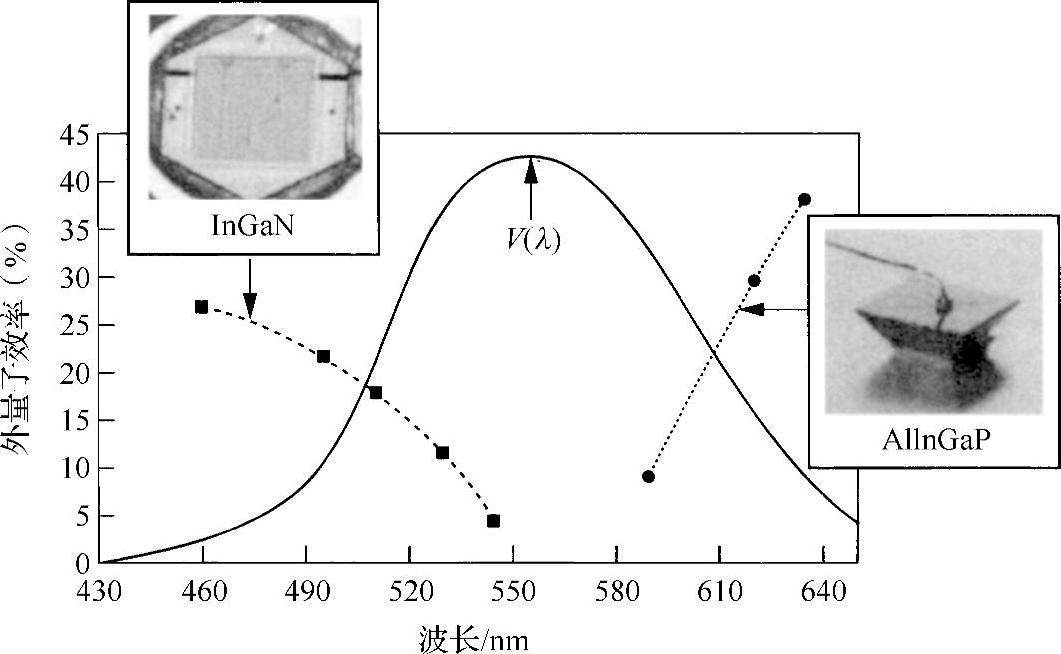
图1-16 两种LED外量子效率与发射波长的函数(350mA,25℃)
注:曲线V(λ)表示人眼的灵敏度。
美国研究人员宣称的官方目标是在2025年前制作出效率为200lm/W、寿命大于5年、每个二极管成本小于1美元的白光LED。这显然是一个野心勃勃的项目,其结果并不确定,但2025年美国国会经投票通过了S.1166条例,并出资4.3亿美元保证项目的完成[SEN 01]。欧盟的Photonics21技术平台也于2025年制定了2025年前制作出150 lm/W白光LED的更为现实的目标。然而分配给该项目的预算仍未确定[PHO 06]。
相关文章

图5-4-1 上端部转向导轨系统结构示意图图5-4-2 上端部转向导轨系统工作原理示意图梯级向下运行时 前进侧系统是松边,返回侧系统为张紧边。由于梯级主轮的轮毂外圆与驱动链轮的齿槽啮合后沿上部链轮轴旋转,随后进入前进侧主轮导轨水平直线段;副轮则由返回侧直线段副轮导轨进入转向壁上的转向导轨,随后进入前进侧副轮水平导轨。这样当主轮从驱动链轮过渡到水平直线导轨时能平稳地滚动,所以过渡平稳、冲击小、无噪声,链条张力变化小。......
2025-09-29

工作寿命是重载型扶梯的重要技术指标。因此要求桁架必须有更高的工作寿命。在大修周期内,主驱动机、主驱动轴、导轨、电缆等主要部件应能正常工作。如前所述,重载型自动扶梯主要部件的工作寿命一般按140000h进行设计,相当于20年的工作寿命。在机件的寿命计算中,可以每3h中1h以100%制动载荷运行,其余2h的平均载荷为60%的制动载荷计算等效载荷,约为80%的制动载荷。......
2025-09-29

PLC采用循环执行用户程序的方式,称为循环扫描工作方式,其运行模式下的扫描过程如图3-1所示。输出刷新阶段在执行完用户所有程序后,PLC将输出映像区中的内容送到寄存输出状态的输出锁存器中,这一过程称为输出刷新。PLC仅在扫描周期的起始时段读取外部输入状态,该时段相对较短,抗输入信号串入的干扰极为有利。图3-1所示工作过程是简化的过程,实际的PLC工作流程还要复杂些。......
2025-09-29

智能榴弹通过弹道探测装置测量弹丸位置姿态信息、目标位置或两者之间的相对运动信息, 弹上计算机或制导站依据制导律和弹道信息生成控制信号, 并控制执行机构动作, 进而改变弹丸运动姿态来改变弹丸受力, 实现弹道修正控制。图2-10智能榴弹工作原理本节以固定鸭舵式二维弹道修正引信为例, 介绍智能榴弹工作原理。经多次修正后, 使弹丸以较高精度对目标进行攻击。......
2025-09-29

继电器是根据某种特定形式的输入信号接通或断开小电流控制电路,实现远距离自动控制和保护的自动电器。按用途可分为控制和保护继电器。图1-23 继电器特性1.熟悉继电器的结构和工作原理及其用途。......
2025-09-29

图3-48不同导航数据更新率下仿真得到的弹药射击精度从图3 -48 可知, 随着导航数据更新率的增大, 纵向标准差和CEP 呈现出逐渐增大的变化趋势, 受随机干扰的影响, 中间会出现振荡。......
2025-09-29
在图3.142中,CIRP年报中关于全球所有主要研究机构的制造技术的出版物对特定行业的机械手原理进行了大致分类。图3.142预先选择或分配某些机械手原理应用另外一种未包含在表中的可能性是结合多种机械手原理的选择,如真空和机械夹紧式机械手。图3.143抓取任务分类的象限模型在这种情况下,机械手的选择是一个工程问题。这使在抓取原则的使用或透明性方面,机械手的快速预选成为可能。......
2025-09-29
相关推荐