图3.78不同力传导的三维说明对于应用中机械手最佳选择的问题并不容易回答。然而,当看到张角型机械手的夹持力变化过程与平动型机械手相比时,夹持力变化过程对于决策的相对重要性变得清晰。张角型机械手将根据手指的位置呈现不同的夹持力。相比之下,平动型机械手在整个手指行程中提供恒定的夹持力。......
2025-09-29
运动控制程序指令块使用PTO功能和“轴”工艺对象的接口控制运动机械的运行,运动控制指令块被用于传输指令到工艺对象,以完成处理和监视。S7-1200运动控制指令块包括:MC_Power、MC_Reset、MC_Home、MC_Halt、MC_MoveAbsolute、MC_MoveRelative、MC_MoveVelocity和MC_MoveJog,下面一一介绍。
1.MC_Power系统使能指令块
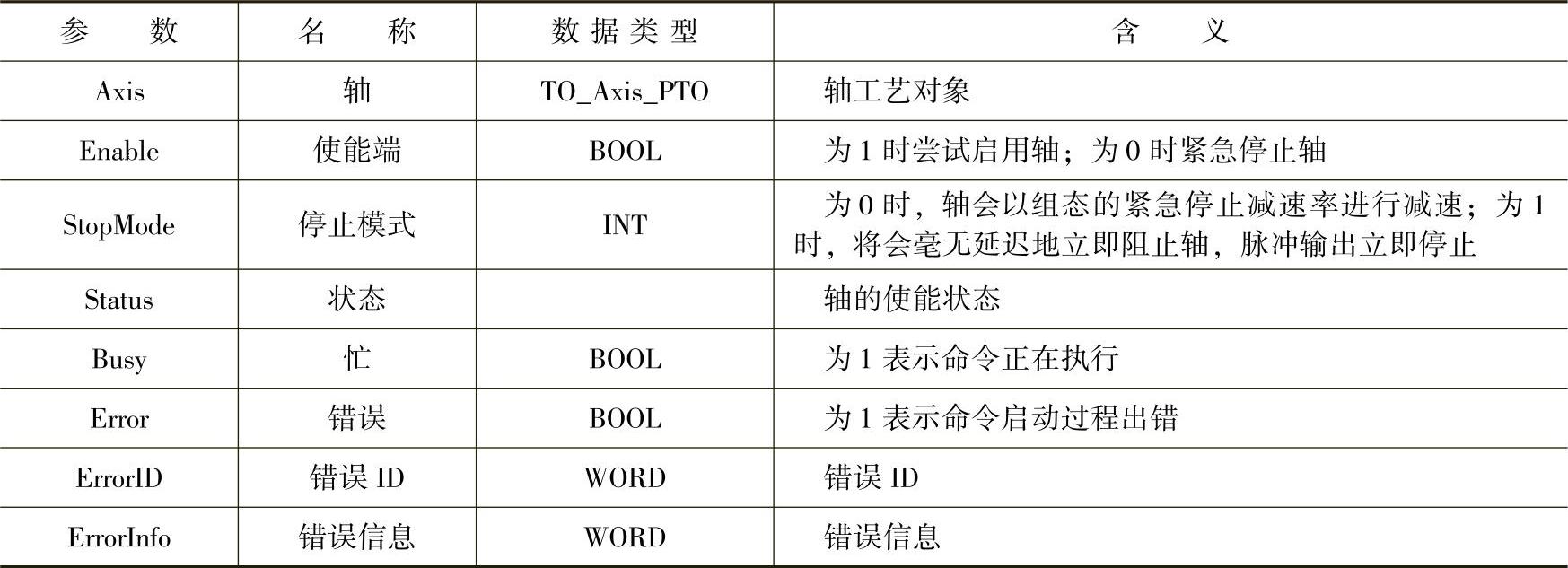
系统使能指令块如图9-37所示,其参数含义如表9-21所示。轴在运动之前必须先被使能。MC_Power块的Enable端变为高电平后,CPU按照工艺对象中组态好的方式使能外部伺服驱动,当Enable端变为低电平后,轴将按StopMode中定义的模式进行停车,当Enable端为0时,将按照组态好的急停方式停车;当Enable端值为1时将会立即终止输出。用户程序中,针对每个轴只能调用一次“启用和禁用轴”指令,需要指定背景数据块。
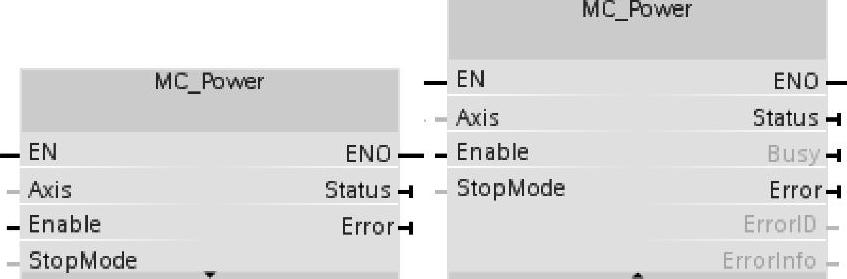
图9-37 MC_Power系统使能指令块
表9-21 MC_Power参数含义
2.MC_Reset错误确认指令块
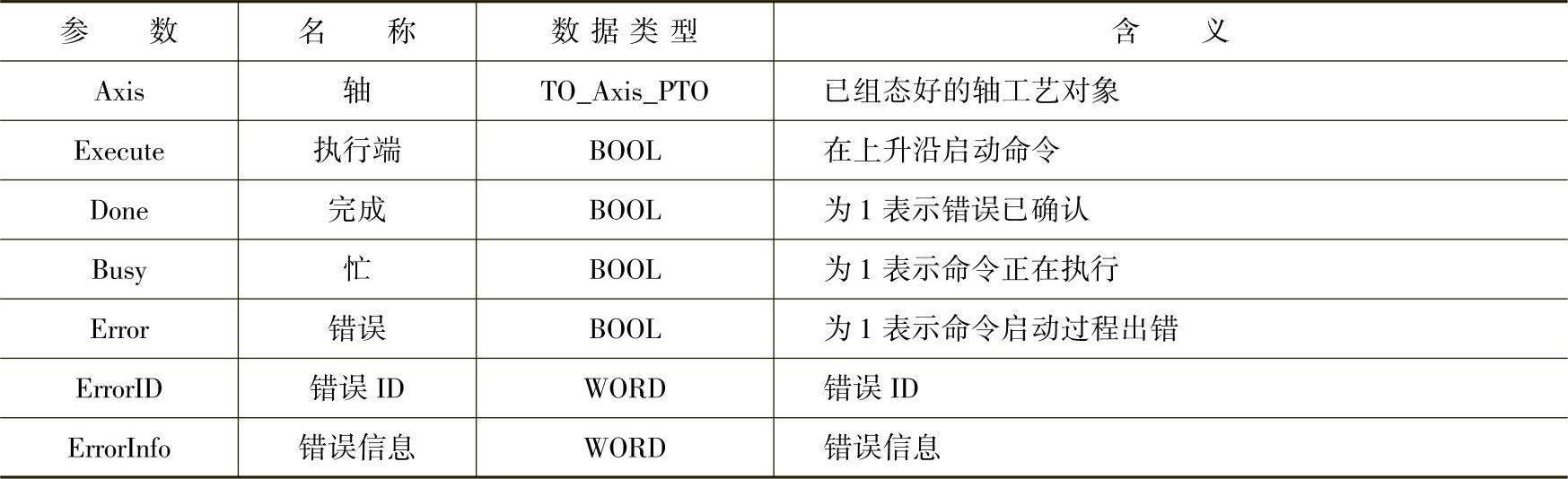
错误确认指令块如图9-38所示,其参数含义如表9-22所示,需要指定背景数据块。如果存在一个需要确认的错误。可通过上升沿激活MC_Reset块的Execute端,进行错误复位。
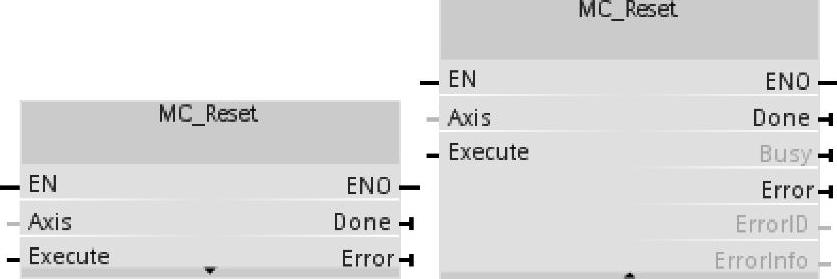
图9-38 MC_Reset错误确认指令块
表9-22 MC_Reset参数含义
3.MC_Home回原点/设置原点指令块
回原点/设置原点指令块如图9-39所示,其参数含义如表9-23所示,需要指定背景数据块。该指令块用于定义原点位置,上升沿使能Execute端,指令块按照模式中定义好的值执行定义参考点的功能,回参考点过程中,轴在运行中时,MC_Home指令块中的Busy位始终输出高电平,一旦整个回参考点过程执行完毕,工艺对象数据块中的HomingDone位被置1。
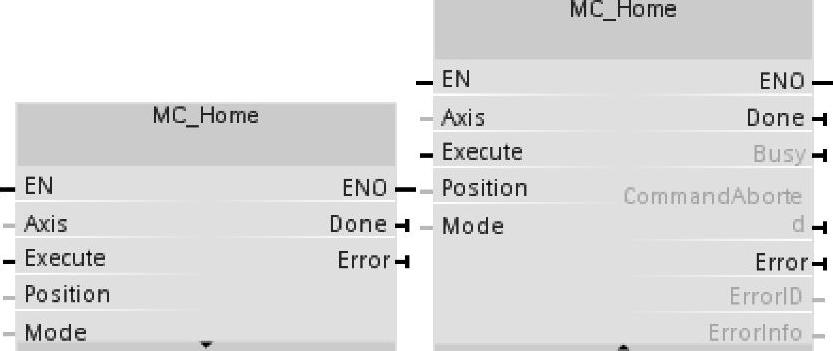
图9-39 MC_Home回原点/设置原点指令块
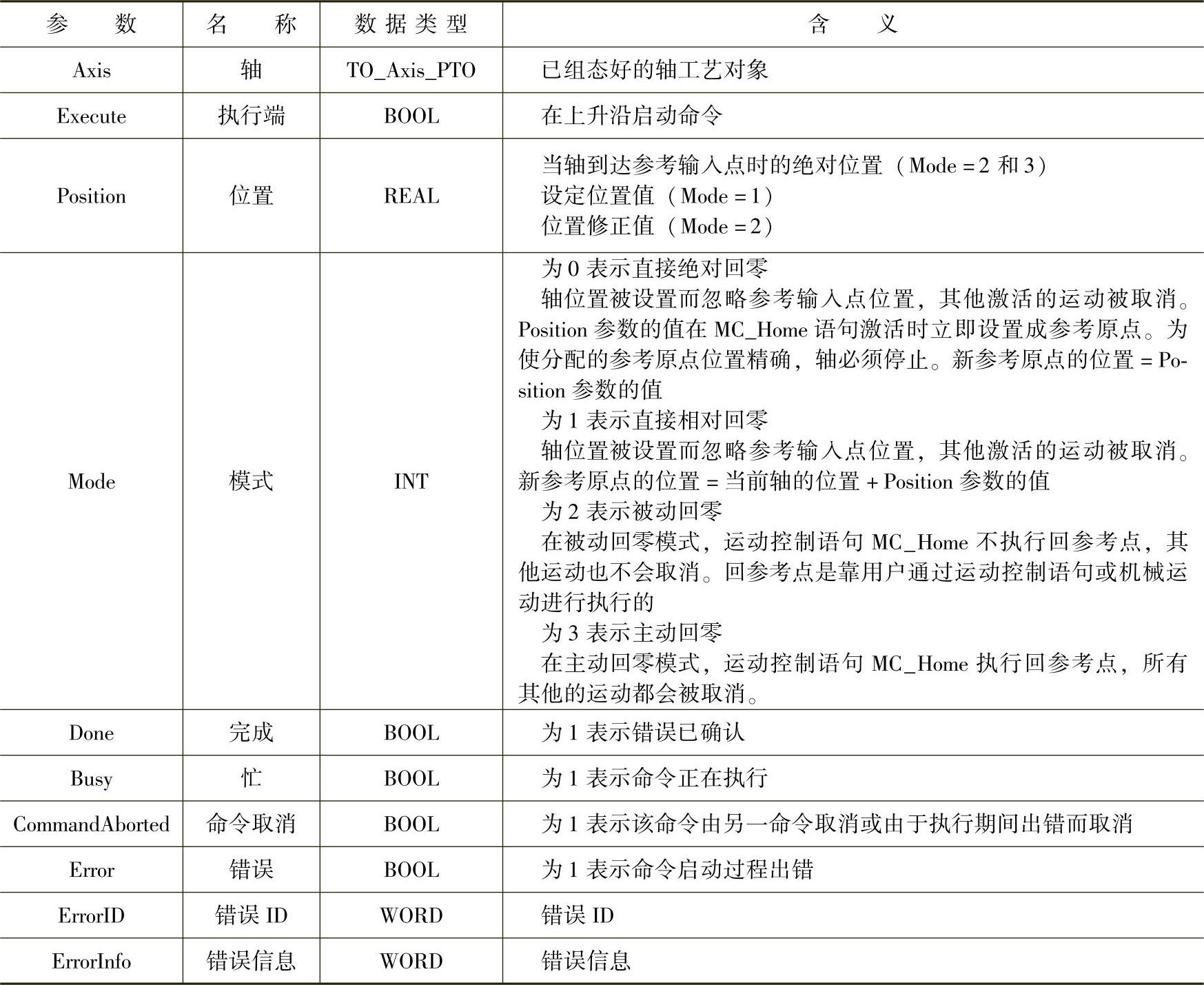
表9-23 MC_Home参数含义
注:MC_Home指令块的模式0和1不需要轴做任何移动,一般在机械校准和安装时使用,模式2和3需要轴运动并触发在工艺对象中组态好的作为参考原点的外部物理输入点。
4.MC_Halt停止轴指令块
停止轴指令如图9-40所示,其参数含义如表9-24所示,需要指定背景数据块。MC_Halt块用于停止轴的运动,每个被激活的运动指令,都可由此块停止,上升沿使能Execute后,轴会立即按组态好的减速曲线停车。

图9-40 MC_Halt停止轴指令块
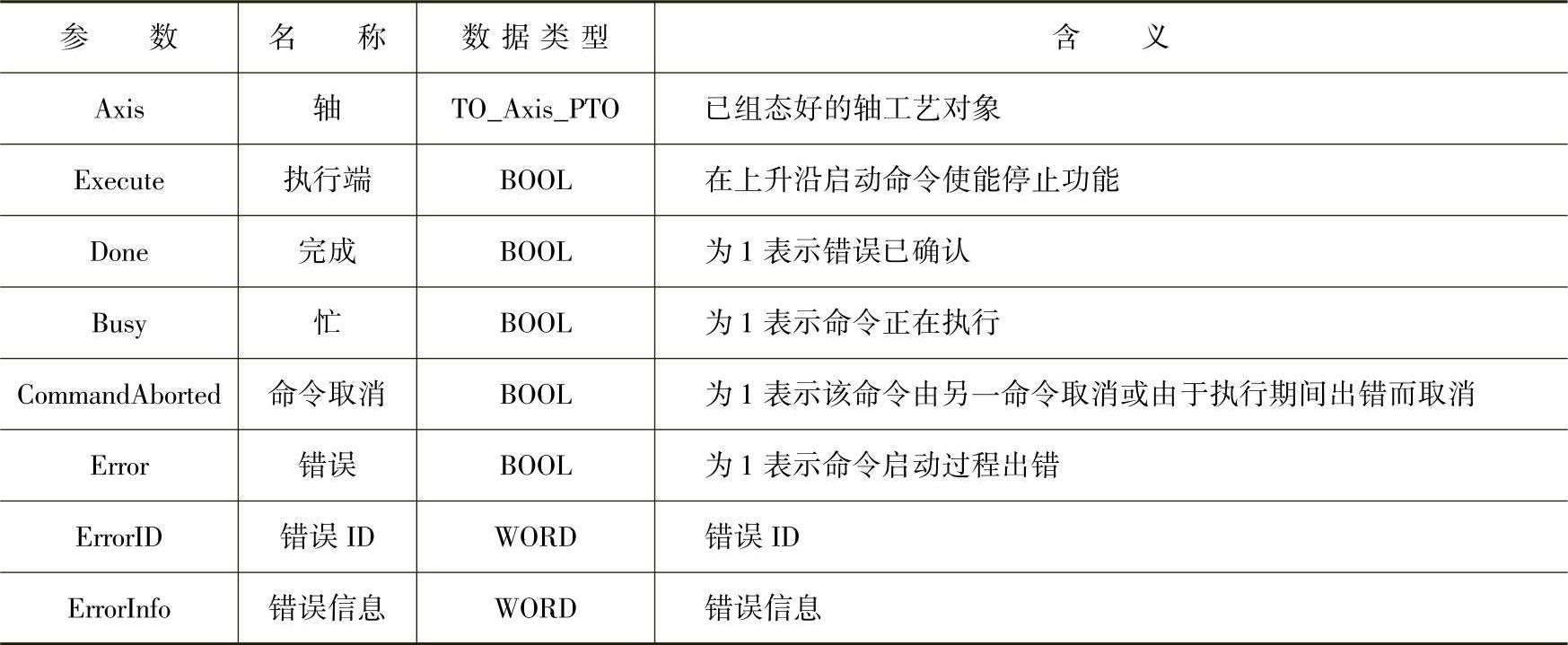
表9-24 MC_Halt参数含义
5.MC_MoveAbsolute绝对位移指令块
绝对位移指令块如图9-41所示,其参数含义如表9-25所示,需要指定背景数据块。MC_MoveAbsolute指令块需要在定义好参考点,建立起坐标系统后才能使用,通过指定参数可到达机械限位内的任意一点。当上升沿使能调用选项后,系统会自动计算当前位置与目标位置之间的脉冲数,并加速到指定速度,在到达目标位置时减速到启动/停止速度。
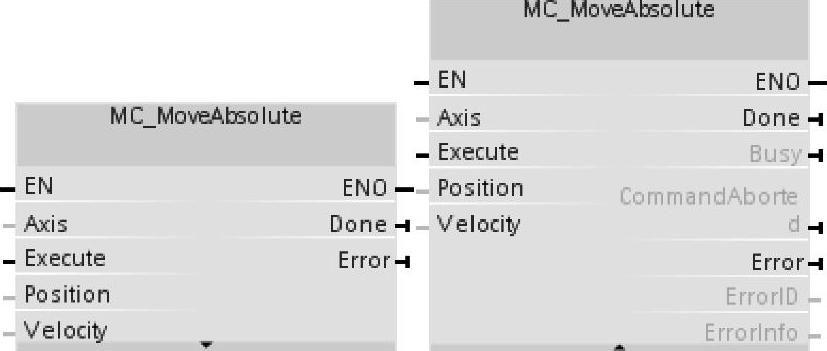
图9-41 MC_MoveAbsolute绝对位移指令块
表9-25 MC_MoveAbsolute参数含义
 (https://www.chuimin.cn)
(https://www.chuimin.cn)
6.MC_MoveRelative相对位移指令块
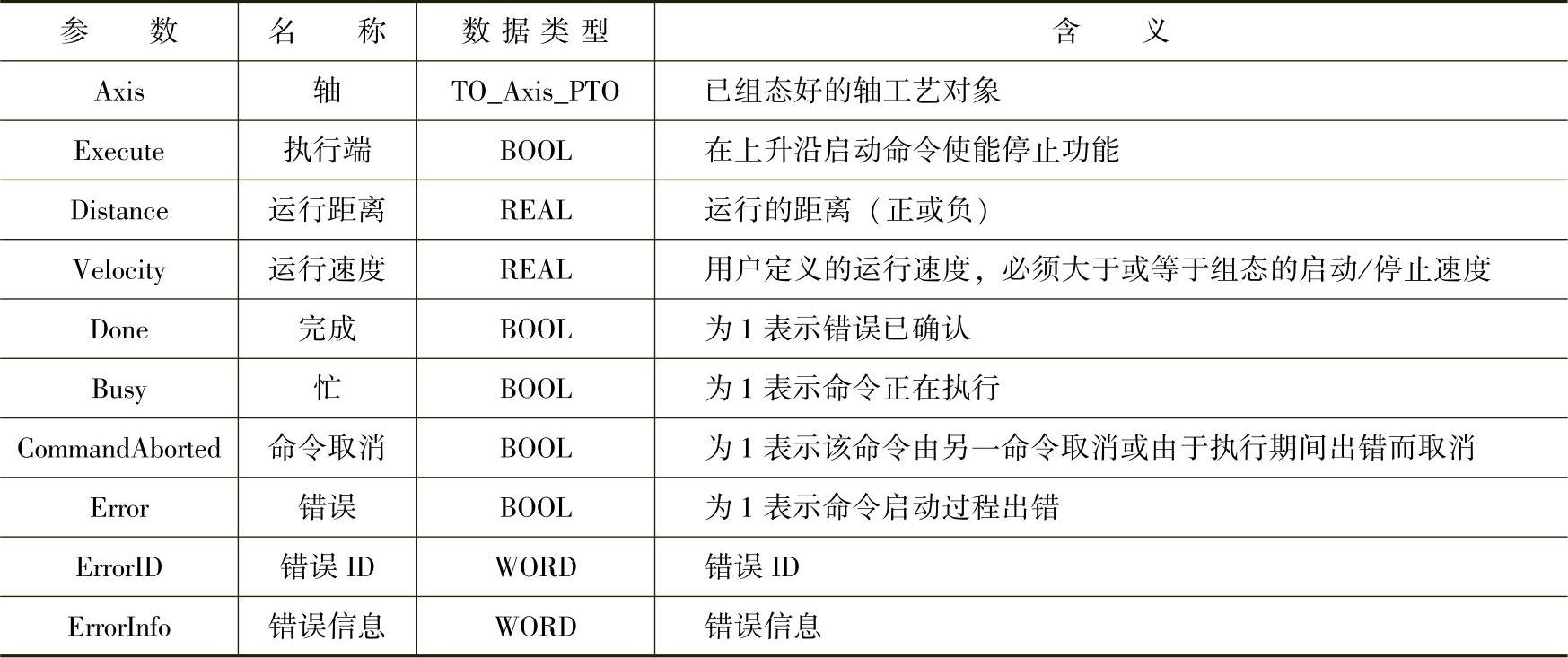
相对位移指令块如图9-42所示,其参数含义如表9-26所示,需要指定背景数据块。相对位移指令块不需要建立参考点,只需定义运行距离、方向及速度。当上升沿使能Exe-cute端后,轴按照设置好的距离与速度运行,其方向根据距离值的符号(+/-)决定。

图9-42 MC_MoveRelative相对位移指令块
表9-26 MC_MoveRelative参数含义
绝对位移指令与相对位移指令的主要区别在于是否需要建立坐标系统,即是否需要原点(参考点)。绝对位移指令需要知道目标位置在坐标系中的坐标,并根据坐标自动决定运动方向,此时需要定义原点;而相对位移只需知道当前点与目标位置的距离,由用户给定方向,无需建立坐标系统,此时不需要定义原点。
7.MC_MoverVelocity目标转速运动指令块
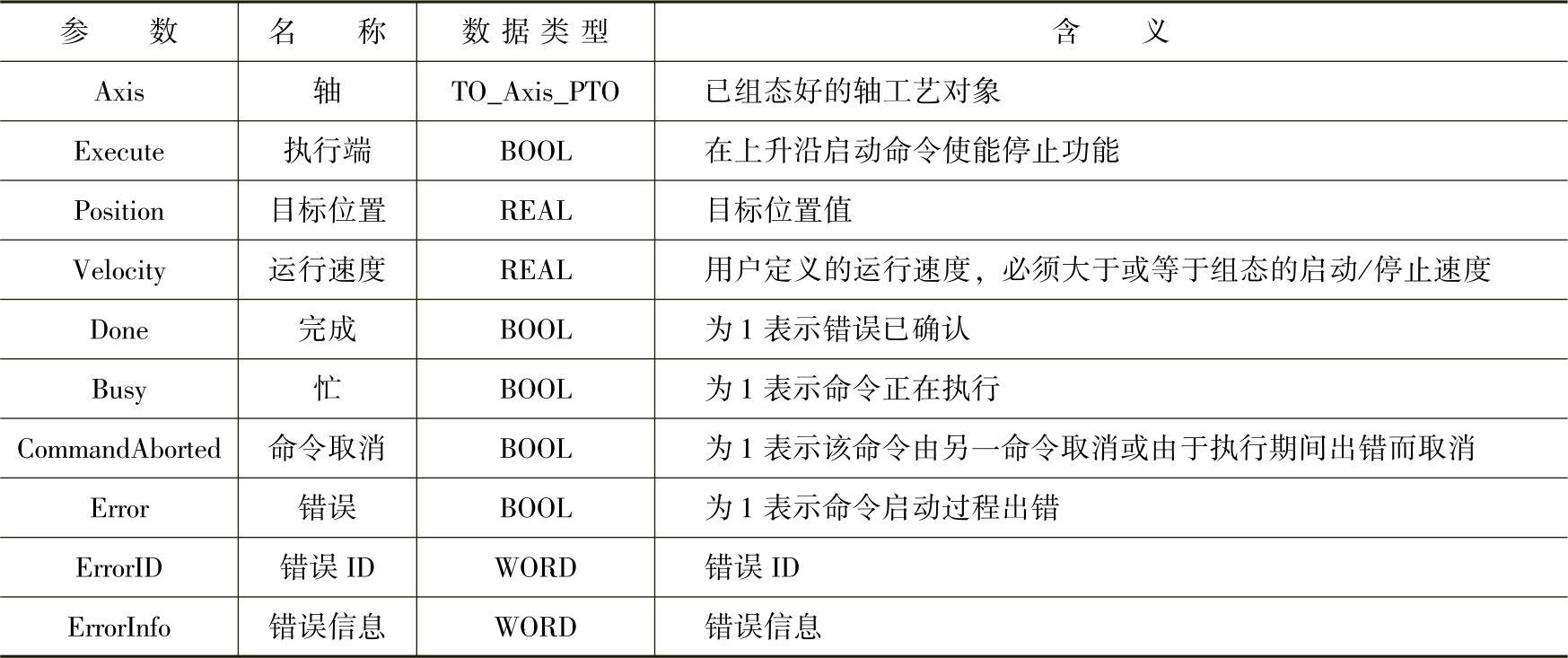
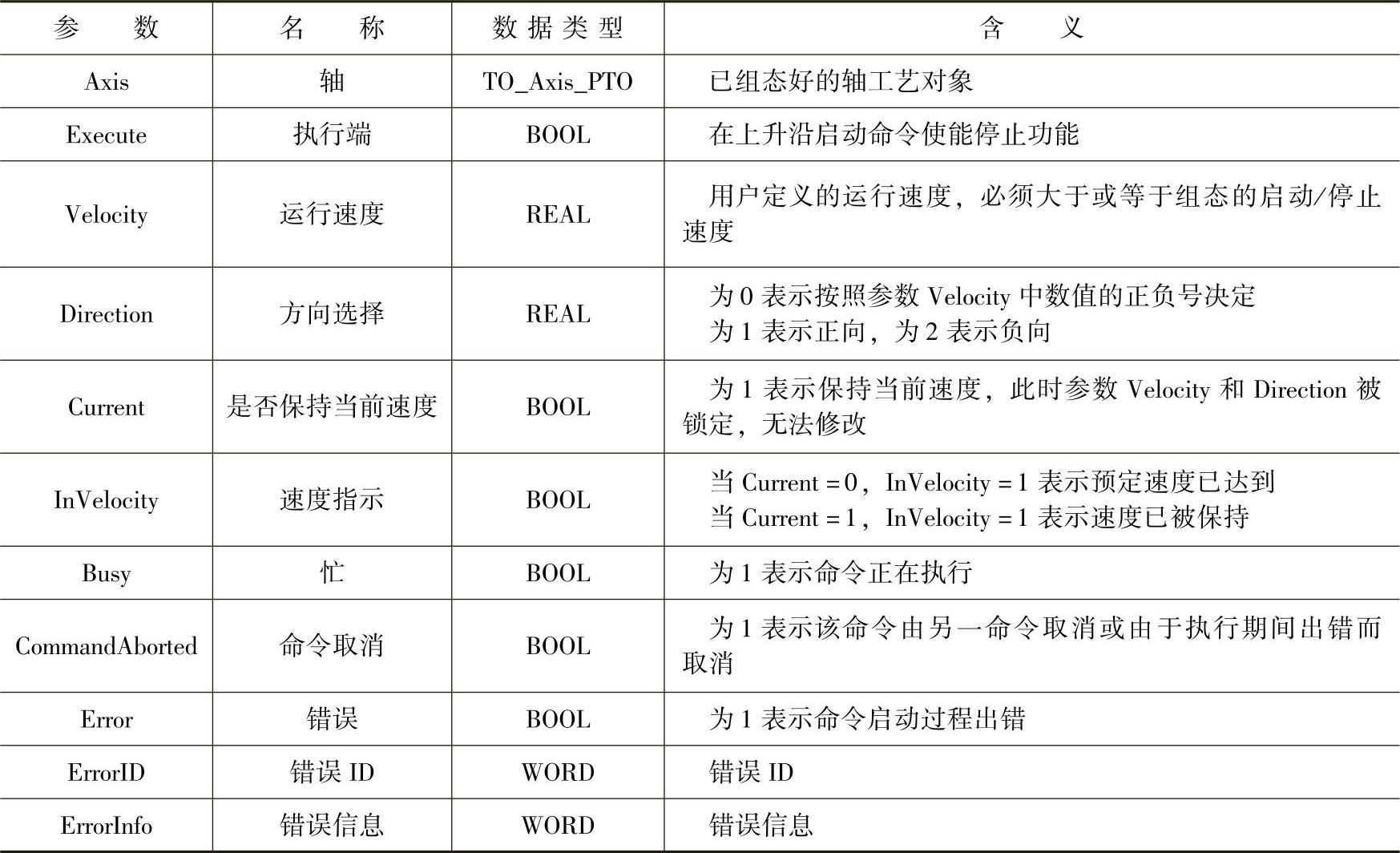
目标转速运动指令块如图9-43所示,其参数含义如表9-27所示,需要指定背景数据块。MC_MoverVelocity指令块可使轴按预设速度运动,需要在Velocity端设定速度,并在上升沿使能Execute端,激活此指令块。使用MC_Halt指令块可使运动的轴停止。
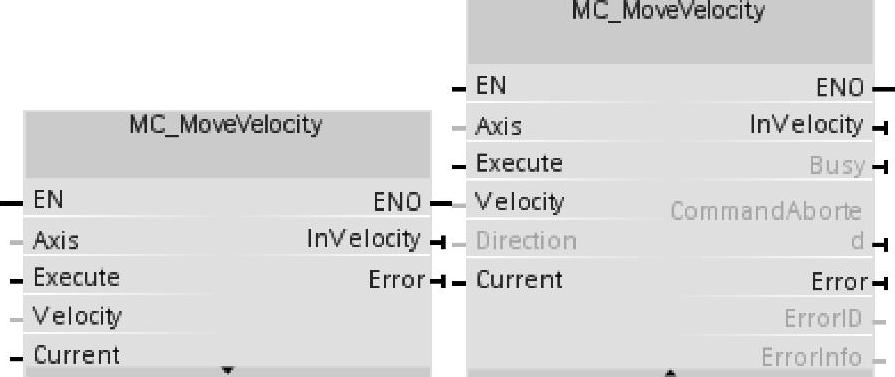
图9-43 MC_MoverVelocity目标转速运动指令块
表9-27 MC_MoverVelocity参数含义
8.MC_MoveJog点动指令块
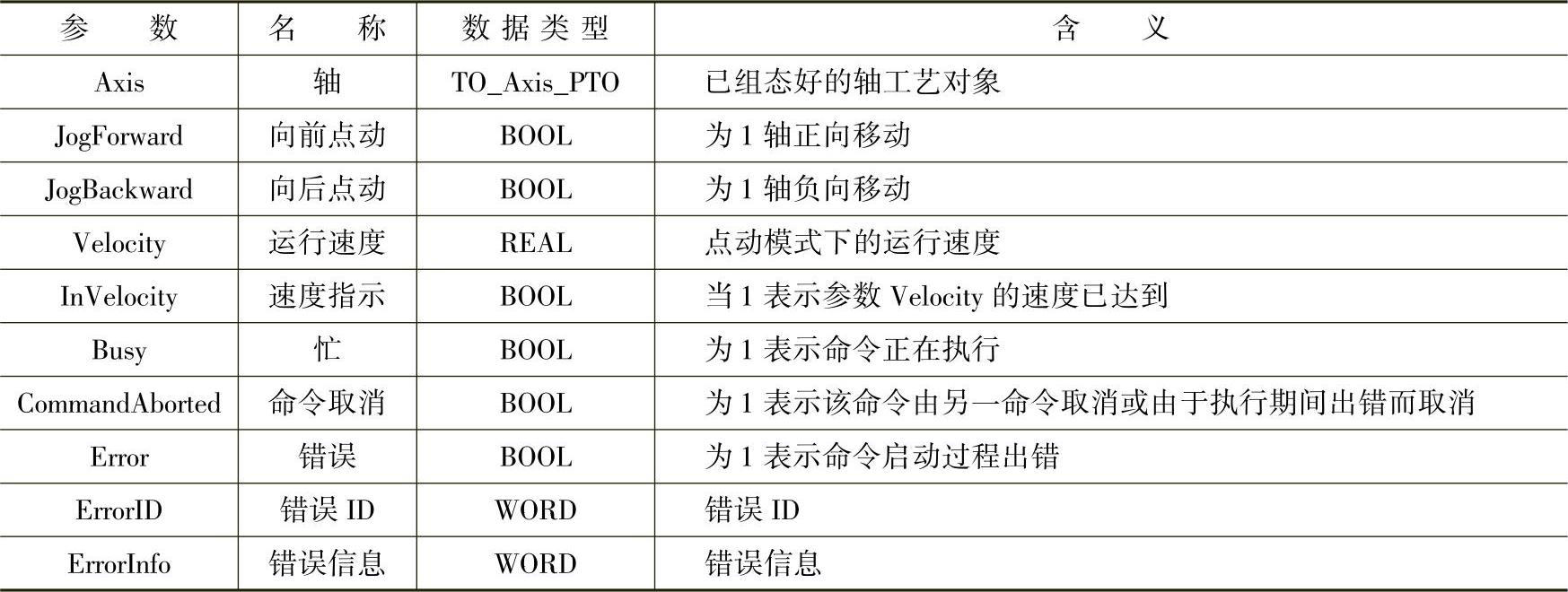
点动指令块如图9-44所示,其参数含义如表9-28所示,需要指定背景数据块。MC_MoveJog指令块可让轴运行在点动模式,首先要在Velocity端设置好点动速度,然后置位向前点动和向后点动端,当JogForward或JogBackward端复位时点动停止。轴在运行时,Busy端被激活。
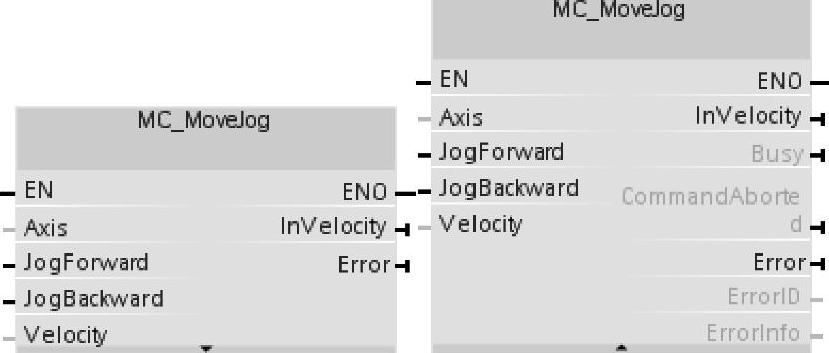
图9-44 MC_MoveJog点动指令块
表9-28 MC_MoveJog参数含义
上述运动控制指令块在输出参数Error、ErroeID和ErroInfo中显示所有工艺对象的错误。错误的原因要查看输出参数ErrorID,详细的原因要查看ErroInfo。错误分为以下错误等级:
(1)不造成使轴停止的错误
在运动控制语句执行期间发生的运行错误不造成轴的停止,只在控制语句中显示。控制语句可以在错误补救后不需要确认重启。
(2)使轴停止的错误
在运动控制语句执行期间发生的运行错误造成轴的停止,轴会按照配置的急停减速率停止。工艺对象只能在通过MC_Reset复位错误后执行命令。
(3)指令块参数错误
运动控制指令块的输入参数配置不正确会造成错误。该错误仅在出发运动控制语句时显示。运动控制语句可以在错误补救后不需要确认重启。
(4)配置错误
由于轴的参数没有正确配置而产生的错误,该错误会在运动控制语句和在MC_Power语句触发显示。
(5)内部错误
内部错误在运动控制和MC_Power语句触发时显示,如果需要复位错误则必须重启控制器。
关于错误的详细代码请参考文献[1]。
相关文章

图3.78不同力传导的三维说明对于应用中机械手最佳选择的问题并不容易回答。然而,当看到张角型机械手的夹持力变化过程与平动型机械手相比时,夹持力变化过程对于决策的相对重要性变得清晰。张角型机械手将根据手指的位置呈现不同的夹持力。相比之下,平动型机械手在整个手指行程中提供恒定的夹持力。......
2025-09-29

数据块的数目和最大块长度依赖于CPU的型号。可以看出,数据块就像一个大柜子,每个字节类似于一个抽屉,存放8个位的数据。这样,对数据块的直接地址寻址和前面介绍的存储区寻址是类似的。在用户程序中使用绝对地址寻址时,一定要结合指令和数据块的符号列表仔细核对绝对地址和数据类型。......
2025-09-29

延时中断OB在经过操作系统中一段可组态的延迟时间后启动。可以使用中断指令CAN_DINT阻止执行尚未启动的延时中断。暖启动将清除延时中断OB的所有启动事件。可以使用中断指令DIS_AIRT和EN_AIRT来禁用和重新启用延时中断。要求:在I0.0的上升沿用SRT_DINT启动延时中断OB202,10s后OB202被调用,在OB202中将Q1.0置位,并立即输出。示例程序如图6-50所示,图6-50a为OB1中启动延时中断的程序,图6-50b为OB202中置位Q1.0的程序。......
2025-09-29

例如:某照明灯的项目代号为“=S3+301-E3:2”,表示3号车间变电所301室3号照明灯的第2个端子。图1-33为某10kV线路过电流保护项目的项目代号、前缀及其分解图。图1-33 项目代号结构、前缀及其分解图1.高层代号对所给代号的项目而言,设备或系统中任何较高层次的代号都可称为高层代号。图1-34 位置代号说明示例图3.种类代号种类代号是用来识别项目种类的代号。端子代号是构成项目代号的一部分。......
2025-09-29

在机械图样中,规定尺寸单位用毫米表示,且可省略不标,采用其他单位则必须标出。通常,图样上标注的尺寸均为公称尺寸,孔、轴公称尺寸一般指直径,孔的公称尺寸用D表示,轴的公称尺寸用d表示。其中较大的一个称为上极限尺寸,分别以Dmax和dmax表示。用极限尺寸判断原则判断合格的孔或轴,其尺寸应符合以下条件。......
2025-09-29
由表3-15可以看出组织块分为以下几类:程序循环组织块程序循环OB在CPU处于RUN模式时循环执行。OB1是默认循环组织块,其他程序循环OB必须标识为OB200或更大。延时中断组织块通过启动中断指令组态事件后,时间延迟组织块将以指定的时间间隔执行。指定的延迟时间结束时,时间延迟组织块将中断正常的循环程序执行。OB 82是唯一支持诊断错误事件的组织块。......
2025-09-29

表5-1 常用的位逻辑指令1.基本逻辑指令常开触点对应的存储器地址位为1状态时,该触点闭合。当I0.2=1,I0.3=1时,Q4.0~Q4.7被复位为零。图5-4 置位域复位域指令图5-5 触发器的置位复位指令触发器指令上的M0.0和M0.1称为标志位,R、S输入端首先对标志位进行复位和置位,然后再将标志位的状态送到输出端。编写程序如图5-12所示,其中M1.5为CPU时钟存储器MB1的第5位,其时钟频率为1 Hz。......
2025-09-29
S7-1200 PLC的比较指令如表5-3所示。比较指令只能对两个相同数据类型的操作数进行比较。图5-27 例5-7程序值在范围内指令IN_RANGE和值在范围外指令OUT_RANGE可测试输入值是在指定的值范围之内还是之外。如果比较结果为TRUE,则其输出为真。图5-28 例5-8程序使用OK和NOT_OK指令可测试输入的数据是否为符合IEEE规范754的有效实数。......
2025-09-29
相关推荐