该精细波形控制中,由于抑制了短路初期的电流、熔滴过渡时短路电流的峰值以及熔滴短路阶段的电流增长速率,从而可以有效地减少短路过渡飞溅;在燃弧阶段,控制了燃弧能量,保证焊缝成形,因此焊接质量得到明显的改善。......
2023-06-30
S7-1200 PLC输出脉冲和方向信号至Servo Drive(伺服驱动器),伺服驱动器再将从CPU输入的给定值经过处理后输出到伺服电动机,控制伺服电动机加速/减速和移动到指定位置,如图9-26所示。伺服电动机的编码器信号输入到伺服驱动器形成闭环控制,用于计算速度与当前位置,而S7-1200内部的高速计数器则测量CPU上的脉冲输出,计算速度与位置,但此数值并非电机编码器所反馈的实际速度与位置。S7-1200 PLC提供了运行中修改速度和位置的功能,可以使运动系统在停止的情况下,实时改变目标速度与位置。
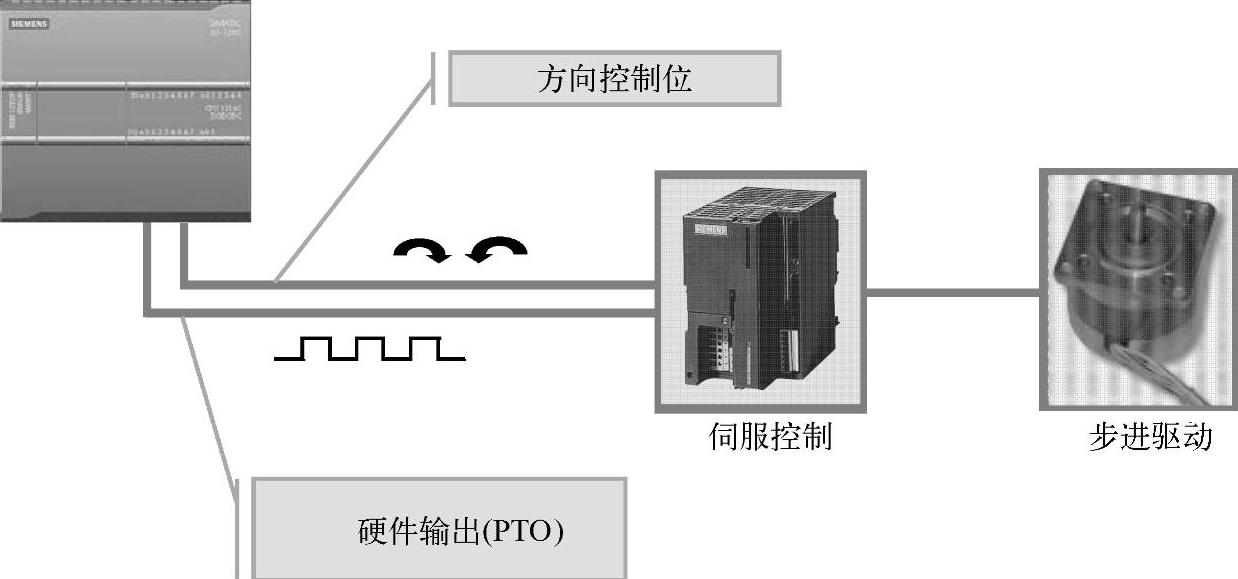
图9-26 S7-1200运动控制示意图
运动控制功能原理示意图如图9-27所示。可以看出,S7-1200运动控制功能的实现包含以下4部分:
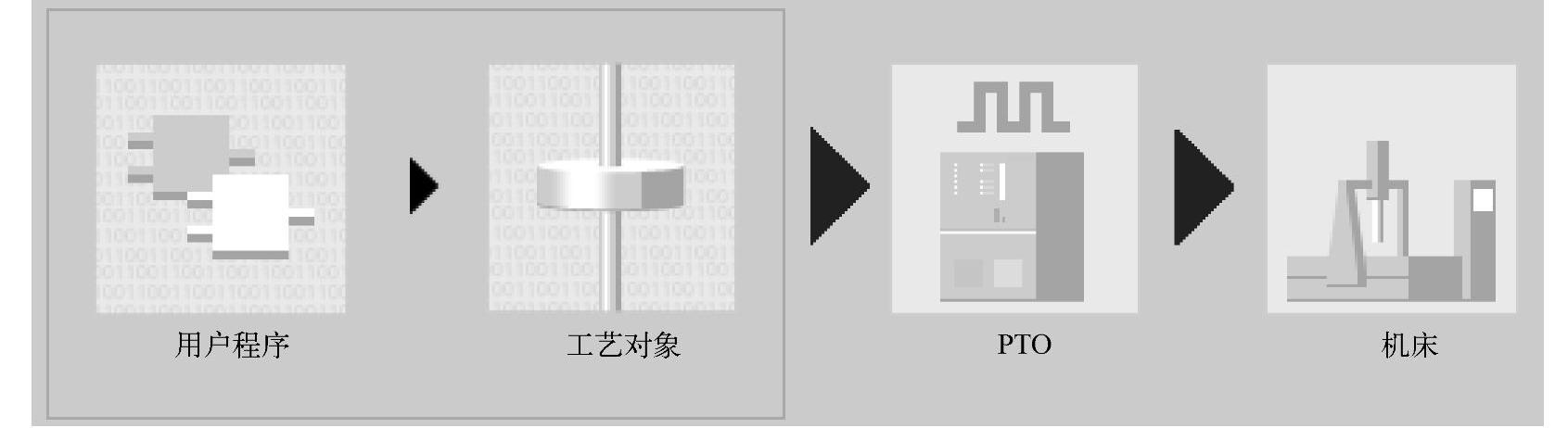
图9-27 运动控制功能原理示意图
①相关执行设备。
②CPU硬件输出。
③定义工艺对象“轴”。
④程序中的控制指令块。
执行设备主要包括伺服驱动器和伺服电动机,CPU通过硬件输出,给出脉冲与方向信号,用于控制执行设备的运转。
CPU通过集成或信号板上硬件输出点,输出一串占空比为50%的脉冲串(PTO),CPU通过改变脉冲串的频率以达到加速/减速的目的。
集成点输出的最高频率为100 kHz,信号板输出的最高频率为20 kHz,CPU在使能PTO功能时将占用集成点Qa.0,Qa.2或信号板的Qa4.0作为脉冲输出点,Qa.1、Qa.3和Q4.1作为方向信号输出点,虽然使用了过程映像区的地址,但这些点会被PTO功能独立使用,不会受扫描周期的影响,其作为普通输出点的功能将被禁止。
下面介绍硬件输出的组态。
在项目视图中打开设备配置,选中CPU,在“属性”对话框的“脉冲发生器(PTO/PWM)”项中,选择高速计数器HSC1,如图9-28所示,勾选“允许使用该脉冲发生器”项。在“脉冲选项”中,脉冲发生器有两种类型:PTO与PWM,使用运动控制功能时需要选择PTO方式。输出IO地址和硬件识别符为系统默认。

图9-28 激活脉冲发生器功能
有关西门子S7-1200 PLC编程与应用的文章

该精细波形控制中,由于抑制了短路初期的电流、熔滴过渡时短路电流的峰值以及熔滴短路阶段的电流增长速率,从而可以有效地减少短路过渡飞溅;在燃弧阶段,控制了燃弧能量,保证焊缝成形,因此焊接质量得到明显的改善。......
2023-06-30

随着亮化工程的增加,控制效果也要求越来越复杂,目前对于LED控制系统,有多种分类方式,按其工作性质分为网络控制系统、总线控制系统和驱动型控制系统三类。DMX512也是目前应用最广泛的LED控制系统。串行LED控制器需要在LED的光源板配有移位寄存器,超过512路需要加分控器。LED必须是共阳极连接法,控制器控制阴极,控制器不包括低压电源。......
2023-06-15
FEKO提供了LUA的脚本功能,在前处理CADFEKO和后处理POSTFEKO中均集成了LUA脚本编辑器Script editor,如图4-37所示。图4-37 FEKO的LUA脚本编辑器FEKO脚本编辑器的启动方法非常简单,即在CADFEKO或POSTFEKO的“Home”菜单中单击“Script editor”按钮,即可弹出脚本编辑器,如图4-38和图4-39所示。对于初学者,也有助于掌握LUA脚本。......
2023-10-31

图3.2ADRC结构框图1.跟踪微分器跟踪微分器是自抗扰的重要组成部分,采用下列形式的微分近似公式来对噪声放大效应进行减弱甚至消除:它是由两个惯性环节来得到延迟信号v(tτ1)和v(tτ2)的,从而减小了噪声。......
2023-06-24

比亚迪e5车的充电系统的基本原理如图7.19所示:VTOG充电时,自动识别单相、三相相序,并根据充电电流控制充电方式,根据充电设备识别充电功率,控制充电方式。表7.3 RC与充电电缆额定容量的关系最后,车辆控制装置计算充电电缆额定容量与缆上控制盒的电流后,把车载充电机最大功率设为它们的最小值。2)车载充电机把CC连接确认信号发送给VCU。图7.23 比亚迪e5车交流充电的基本原理......
2023-09-18

基于反馈控制原理组成的控制系统称为反馈控制系统。在反馈控制系统中,控制装置对受控对象施加控制作用,而控制装置接收的信号是被控量的反馈信号与给定值相比较产生的偏差,根据偏差值的大小产生控制作用,实现控制任务。理论上讲,人体本身就是一个具有高度复杂控制能力的反馈控制系统,人们平日任何最简单的活动都体现着反馈控制原理。......
2023-06-28

图13-1目标-攻击弹-防御弹的相对运动关系图中,Vi、θi、ai分别为3个飞行器的速度、弹道倾角以及法向加速度;rmt和qmt分别为攻击弹和目标之间的相对距离和视线角;rmd和qmd分别为防御弹和攻击弹之间的相对距离和视线角;uq和vq分别表示攻击弹和目标垂直于攻击弹-目标视线方向的加速度;wq和分别表示防御弹和攻击弹垂直于防御弹-攻击弹视线方向的加速度。......
2023-08-02

运动员的体脂可用皮脂厚度卡尺很容易地进行估计。运动员可能会发现,在稍许低于或高于体脂估计值时运动能力最佳。2.根据体重和体脂的估计值规划每个运动员的期望比赛体重。3.根据目前的体脂水平,为每个运动员规划体脂降低的速率,以达到“比赛体重”。......
2023-12-03
相关推荐