从上述内容可见,焊接自动化专用设备是一个机械、电子、控制、焊接相结合的复杂系统。焊接自动化专用设备在设计上有特殊性,其设计流程如图5-4-29所示。焊接自动化专用设备的设计基本思路和原则如下:图5-4-29 焊接自动化专用设备的设计流程焊接工艺先行 首先要确定自动焊接工艺,包括工件结构、材料、板厚、接头形式、焊接方法、焊接参数等,这些是很重要的。下面以一个轨道式管道全位置焊接专机的设计为例来说明。......
2023-06-26
焊接机器人是提高焊接过程自动化、智能化,保证焊接质量稳定性,解决恶劣劳动条件下从事焊接施工的重要方向。
近年来,随着海洋结构物建设的增多,水下焊接(在水下环境中进行的特殊焊接作业)的应用也越来越多。为了克服水下环境给焊接带来的难度,科学工作者研究出了多种水下焊接方法。常用的水下焊接方法有湿法、局部干法和干法等三种。从目前的实际应用情况来看,水下焊接主要是由潜水焊工来完成。但是,由于水下潜水焊工技术水平的高低不一,直接影响了焊接接头的质量;对于深水焊接,潜水焊工不但要携带昂贵的氧气,而且潜水焊工在深水中的实际工作时间也受到生理条件的限制;此外,还存在650m饱和潜水深度的极限,超过这个深度的潜水焊工难以进行水下焊接工作。为此,研究开发了水下机器人的焊接工作。目前,水下机器人种类很多,其分类如图14-1所示。
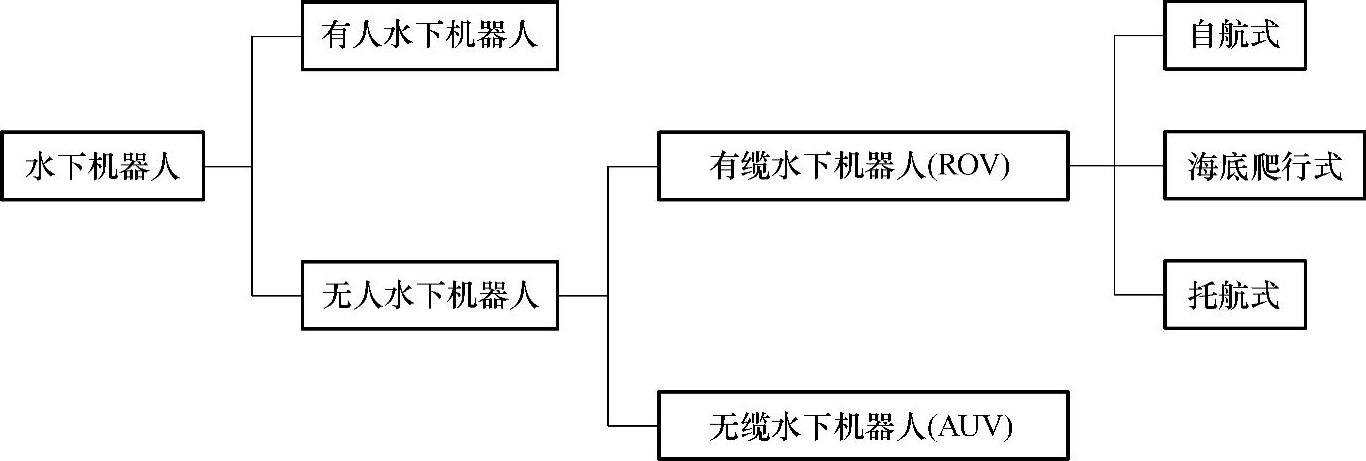
图14-1 水下机器人分类
综合水下焊接技术的发展以及水下机器人研究应用的现状,未来水下焊接机器人应具有如下特点:
1)机器人本体为带有高精度机械手的有缆自由航行的水下机器人。
2)焊接电源和大部分控制装置都安装在支持母船上。
3)根据机器手装配工具的不同,机器人应能完成焊缝的预处理、焊接及焊缝的检测工作。
4)水下机器人控制方式采用手动控制、预编程(自动控制)、局部自治(智能控制)等。
由于水下焊接机器人工作环境的特殊性,增加了水下焊接机器人应用的难度。首先,水流、水压及水的阻力会给水下机器人在水下定位和焊接等工作造成困难。其次,水对光的吸收、反射和折射作用会使机器人在水下的视觉能力降低等。为了解决上述这些难题,实现水下机器人焊接,未来应重点从事以下几方面的研究和开发:
1)水下焊接机器人的精确定位技术,目前水下焊接机器人水下采用声学定位设备,水下GPS技术有待发展。
2)水下焊接机器人在本体晃动的情况下机器手臂的运动控制。
3)基于水下成像的特点,研究三位视觉传感系统。焊缝空间位置的检测、跟踪,以及水下焊接质量的控制。
有关焊工:技师、高级技师的文章

从上述内容可见,焊接自动化专用设备是一个机械、电子、控制、焊接相结合的复杂系统。焊接自动化专用设备在设计上有特殊性,其设计流程如图5-4-29所示。焊接自动化专用设备的设计基本思路和原则如下:图5-4-29 焊接自动化专用设备的设计流程焊接工艺先行 首先要确定自动焊接工艺,包括工件结构、材料、板厚、接头形式、焊接方法、焊接参数等,这些是很重要的。下面以一个轨道式管道全位置焊接专机的设计为例来说明。......
2023-06-26

以图5-4-20所示的环缝焊接专机为例,介绍焊接自动化专用设备的电气控制部分。4)异常情况的处理。图5-4-20 环缝焊接专机5)人机交互界面,包括操作面板与手控盒。完成焊接参数设定与显示、焊接控制命令的输入、工作时序与状态的显示、焊接过程中焊枪位置和焊接参数的微调等。控制软件包括底层的设备控制和信息采集软件、高层的监控和管理平台。焊接专机上层管理软件的功能组成如图5-4-23所示。......
2023-06-26

在直缝、环形焊缝的自动焊接和焊接工位的自动转换,以及生产线的工件传输控制中广泛采用位置传感器。在直缝自动焊接中,在焊缝的两端采用两个位置传感器,来确定焊炬行走的位置,从而实现直缝的自动焊接。......
2023-06-26

由于焊接产品的多样性,焊接自动化专用设备也多种多样,大到船厂大型板材拼焊设备、大型容器环纵缝焊接操作机和滚轮架,小到细管的自动管焊机等。目前,焊接自动化专用设备还没有统一的分类标准,为了对焊接专机有个整体了解,这里列举出几种分类方法:按焊缝形状分 有板材拼焊专机、筒体环缝焊接专机、筒体纵缝焊接专机、管板焊接专机、马鞍形焊缝焊接专机等。......
2023-06-26
在自动化开坡口的厚板焊接中,目前多采用摆动跟踪技术来保证接缝位置的对中。在摆动跟踪焊接过程中,焊枪的摆动频率和幅度、焊接电参数以及接头形状尺寸等都对熔深有着很大的影响。如何在自动化焊接过程中检测出产生这两类缺陷的相应信息是一个重要的实际课题。图9-54给出了在不同摆动频率下电弧电压与焊接电流概率密度分布的一个例子,图9-55是数据处理示意图。......
2023-06-30
4)焊接变位机最高的重复精度为0.1mm,焊接操作机行走机构的定位精度为0.1mm,移动速度的控制程度为0.1%。组成结构上向标准化、模块化方向发展 为缩短专用焊接设备的设计周期和制造成本,专用设备制造厂商提供标准化、模块化的部件,用户根据自己的个性化需求,自行搭建专用焊接设备。自适应能力的加强有利于扩大自动焊接应用的范围。焊接装备数字化体现在个体设备的全数字化控制和整体系统的网络化连接和管理。......
2023-06-26

可看出一个焊接自动化专用设备由以下几部分组成。图5-4-3 典型环缝自动化焊接专机2.电气控制硬件部分电气控制硬件部分由主控计算机、伺服电动机、电动机驱动器、电气接口、人机操作界面等组成。电气控制部分的主要作用包括以下方面:1)伺服电动机的运动控制。2)自动焊接过程的完整时序控制。......
2023-06-26

表12-3 激光视觉传感器的主要技术性能指标注:数据来源Servo-Robot DIGI-I/G数字激光传感器。而采用激光视觉传感器测量工件或夹具的数据点,能将离线编写的程序标定到“真实”,还能自动校正焊枪位置和方向的误差,设置公差阈值来限定允许的最大变化量,所测得的误差自动上载并校正模型,然后运行带激光视觉系统的机器人,激活校正后的程序,确认正确的焊枪角度、距离和焊丝位置。......
2023-07-02
相关推荐