从定义可见,工业机器人强调通用性、可再编程的柔性、自动控制。焊接机器人就是一种能完成焊接任务的工业机器人。表5-5-1 工业机器人的不同结构形式......
2023-06-26
焊接机器人具有性能稳定、工作空间大、运动速度快和负荷能力强等特点,焊接质量明显优于人工焊接,大大提高了点焊作业的生产效率。
点焊机器人主要用于汽车整车的焊接工作,一般装配每台汽车车体大约需要完成3500~4500个焊点,而其中的80%是由机器人完成的。与传统的点焊作业相比较,机器人点焊具有以下优点:
1)安装面积小,工作空间大。
2)能快速完成小节距的多点定位(例如每0.3~0.4s移动30~50mm节距后定位)。
3)定位精度高(±0.25mm),以确保焊接质量。
4)持重大,一般为300~1000N,以便携带内装变压器的焊钳。
5)焊接质量好,安全可靠性高。
6)示教简单,节省工时。
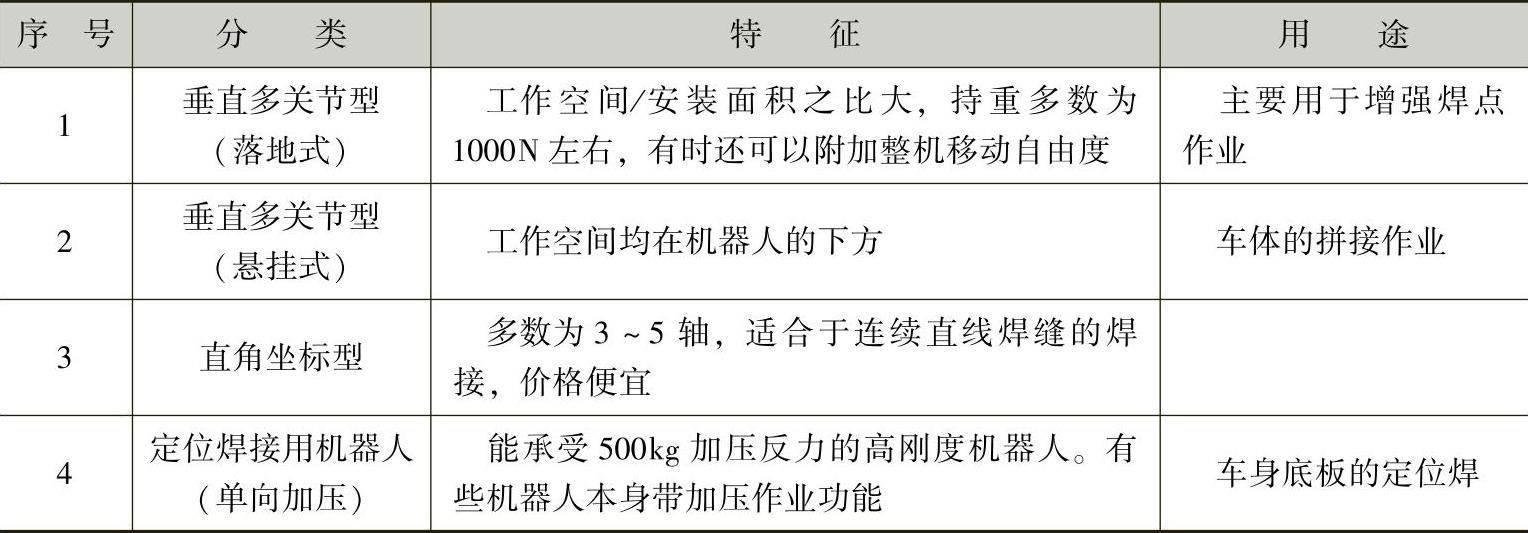
生产现场使用的点焊机器人的分类、特征和用途见表10-12。在驱动形式方面,由于电伺服技术的迅速发展,液压伺服在机器人中的应用逐渐减少,甚至大型机器人也在朝电动机驱动方向过渡,随着微电子技术的发展,机器人技术在性能、小型化、可靠性以及维修等方面日新月异;在机型方面,尽管主流仍是多用途的大型6轴垂直多关节机器人,但是,出于机器人加工单元的需要,一些汽车制造厂家也进行开发研制立体配置3~5轴小型专用机器人的尝试。
表10-12 点焊机器人的分类、特征和用途
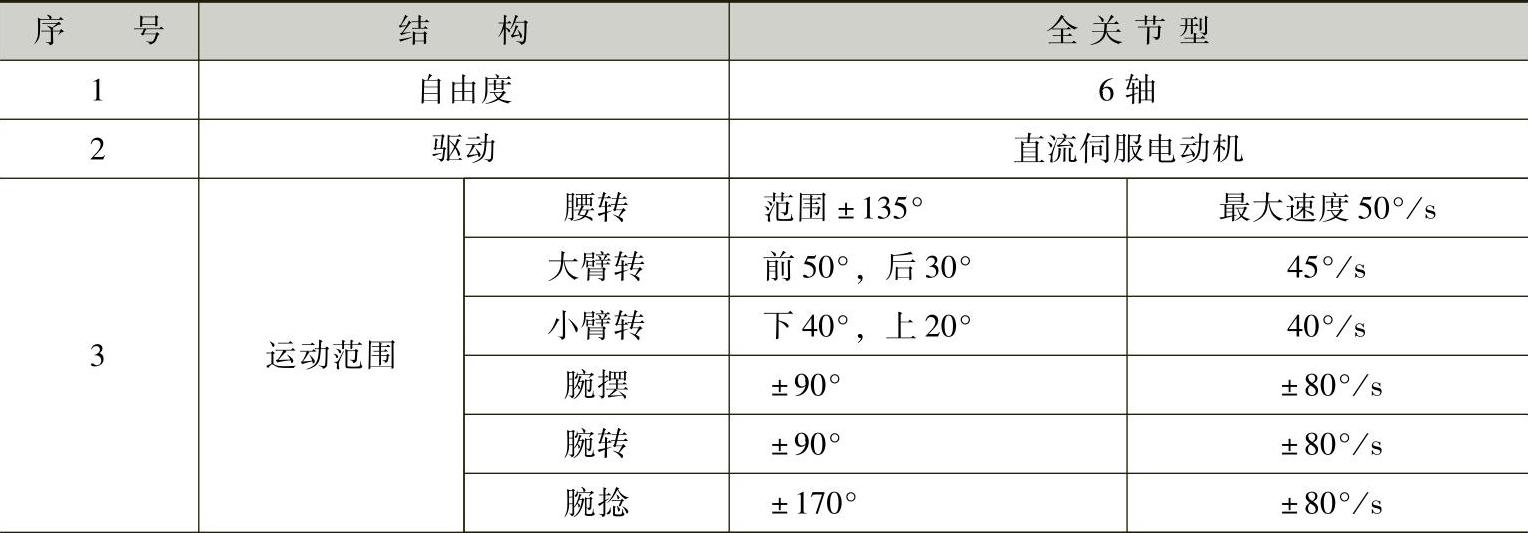
典型点焊机器人以持重为1000N,最高速度为4m/s的6轴垂直多关节点焊机器人为主。由于实用中几乎全部用来完成间隔为30~50mm左右的打点作业,运动中很少能达到最高速度。因此,改善最短时间内频繁短节距起动、制动的性能是本机追求的重点:为了提高加速度和减速度,在设计中注意了减轻该机器人手臂的重量,增加驱动系统的输出转矩。同时,为了缩短滞后时间,得到高的静态定位精度,该机采用低惯性、高刚度减速器和高功率的无刷伺服电动机。
由于在控制回路中采取了加前馈环节和状态观测器等措施,控制性能得到大大改善,50mm短距离移动的定位时间被缩短到0.4s以内。点焊机器人的主要技术指标见表10-13。
表10-13 点焊机器人的主要技术指标
(续)

有关焊工:技师、高级技师的文章

从定义可见,工业机器人强调通用性、可再编程的柔性、自动控制。焊接机器人就是一种能完成焊接任务的工业机器人。表5-5-1 工业机器人的不同结构形式......
2023-06-26

在我国点焊机器人约占焊接机器人总数的46%,主要应用在汽车、农机、摩托车等行业。图2-2-72为点焊机器人实物照片。2)必须使点焊机器人可达到的工作空间大于焊接所需的工作空间,该空间由焊点位置及焊点数量确定。某些先进的点焊机器人,可自动更换焊钳种类和型号。4)根据选用的焊钳结构,焊件材质与厚度及焊接电流波形来选取适当抓重的点焊机器人,通常抓重为50~120kg。点焊机器人的组成如图2-2-73所示。......
2023-06-26

表10-15 点焊缝的质量要求2.点焊缝的质量控制方法1)在焊接前对板件表面的油污、灰尘进行处理,以保证点焊接头的质量稳定。2)定期进行点焊撕裂试验,特殊工序,每周一次;非特殊工序,每月一次。因此,当电极尖端磨损后,需要将电极端面直径维持在一定范围内,从而稳定焊接质量。一般每焊接300焊点修磨一次电极头。......
2023-06-15
2)调节点焊散热条件,使接触面两侧的散热均匀。通过上、下电极直径的不同,使温度场分布趋于合理,减小了熔核的偏移。必要时可用电容点焊机或高频焊机,采用大规范,使得电流场合理分布,能更好地解决边缘效应对贴和面集中加热的效果,由于焊接时间短,使热损失下降,散热的影响相对减小,上述这些条件均对纠正熔核偏移现象有利。也可用电容贮能点焊机点焊厚度差很大的精密零件。......
2023-06-15

并必须采取避免触电、高空坠落和火灾等事故的安全措施。8)点焊机起动前,先编制点焊程序,接通控制线路的转换开关和焊接电流小开关,安插好极数调节刀开关的位置,接通水源、气源,控制箱上各调节旋钮,电极触头保持光洁。当负载过小,引燃管内电弧不能发生时,严禁闭合控制箱的引燃电路。2)点焊机长期停用,应在不涂漆的活动部位涂上防锈油脂。更换闸流管亦应预热30min,正常工作控制箱的预热不少于5min。......
2023-06-15
2)材料的高温塑性及塑性温度范围,即高温屈服强度大的材料、塑性温度区间较窄的材料,其焊接性较差。3)材料对热循环的敏感性,即易生成与热循环作用有关缺陷的材料,其焊接性较差。目前,多脉冲点焊工艺正在进一步试验和推广中。......
2023-06-26
点焊机器人通常由操作机、控制器和点焊钳等组成,现代点焊机器人的特点如下:1)采用逆变一体式点焊钳,大大降低了机器人抓重。例如MOTOMAN点焊机器人已在日本、美国和欧洲获得应用。新型伺服焊钳的优异性能使其成为车身点焊机器人焊钳的首选辅助设备。增加了机器人的柔性。图2-2-104 DELTA SPOT伺服点焊钳图2-2-105 可自动更换焊钳的点焊机器人......
2023-06-26
相关推荐