从上述附加制动器设计要求分析,基本上就是要解决满足制停距离和减速度的问题,而这两个参数与制动力矩有关,也就是如何确定最佳的制动力矩值以满足整体需要的问题。附加制动器的制动力矩需要满足以下条件:1)制动力矩应大于静态制动力矩以使自动扶梯保持静止状态。2)在上述三种失效模式情况下,制动力矩应大于最小制动力矩,而小于最大制动力矩,以同时满足最大加速度和制动距离的要求。......
2023-06-15
驱动主机与驱动主轴间的传动元件多使用传动链条进行连接,如传动链条突然断裂、驱动主机的输出轴或电动机与减速箱之间的联轴器发生破断,则工作制动器与主驱动轴之间就失去了联系。此时,即使有安全开关使电源断电,电动机停止运转,也无法使自动扶梯停止运行。特别是在有载上行时,自动扶梯将突然反向运转并产生超速向下运行,导致恶性事故的出现。应对这种情况的方法是,在驱动主轴上装设一个机械摩擦式制动器,直接对主驱动轴实行制动,这个制动器称为附加制动器或辅助制动器。GB16899—2011规定,自动扶梯在下列任何一种情况下应设置附加制动器:
1)工作制动器和与梯级、踏板或胶带驱动装置之间不是用轴、齿轮、多排链条或多根单排链条连接的。
2)工作制动器没有使用机电式制动器。
3)提升高度大于6m。
4)公共交通型自动扶梯。
1.附加制动器的基本要求
GB 16899—2011对附加制动器有如下基本要求:
1)附加制动器与梯级、踏板或胶带驱动装置之间应用轴、齿轮、多排链条或多根单排链条连接。不允许采用摩擦传动元件(如离合器)构成连接。附加制动器应该是机械式的,利用摩擦原理通过机械结构进行制动。
2)在制动力作用下,应能使带有制动载荷向下运行的自动扶梯有效地减速停止,并使其保持静止状态。减速度不应超过1m/s2。附加制动器独立工作时,并不需要保证对工作制动器所要求的制停距离。
3)附加制动器在动作开始时应强制地切断控制电路。如果电源发生故障或安全回路失电,允许附加制动器和工作制动器同时动作,但要求的制停距离与单独对工作制动器所要求的制停距离相同。
4)附加制动器应在下列任何一种情况下都起作用:超速:在速度超过名义速度1.4倍之前。逆行:当梯级改变其规定的运行方向时。
2.附加制动器的结构种类
自动扶梯的附加制动器有多种不同的设计,常用设计有棘轮式制动器和楔形式制动器等。
(1)棘轮式附加制动器 图7-2-1所示是一种常见的棘轮式附加制动器,安装在主驱动轴上,用压缩弹簧与梯级链轮连成一体。棘轮式制动盘是活套在制动盘上的,与压盘之间衬有摩擦片。正常情况下,棘轮与梯级链轮作同步的旋转运动。当附加制动器动作时,电磁线圈通电,使棘爪向上转动楔入棘轮中,棘轮被拦截停止转动并在摩擦片的作用下对梯级链轮试加制动力矩,迫使自动扶梯停止运行。通过调整摩擦片压紧力的方法,可获得需要的制动力矩。
这种附加制动器由于棘轮具有许多齿,只要棘爪一旦动作,就能使制动器产生制动力,响应时间快、制动迅速,用于逆转保护时,能迅速制动,不会产生明显的逆转。
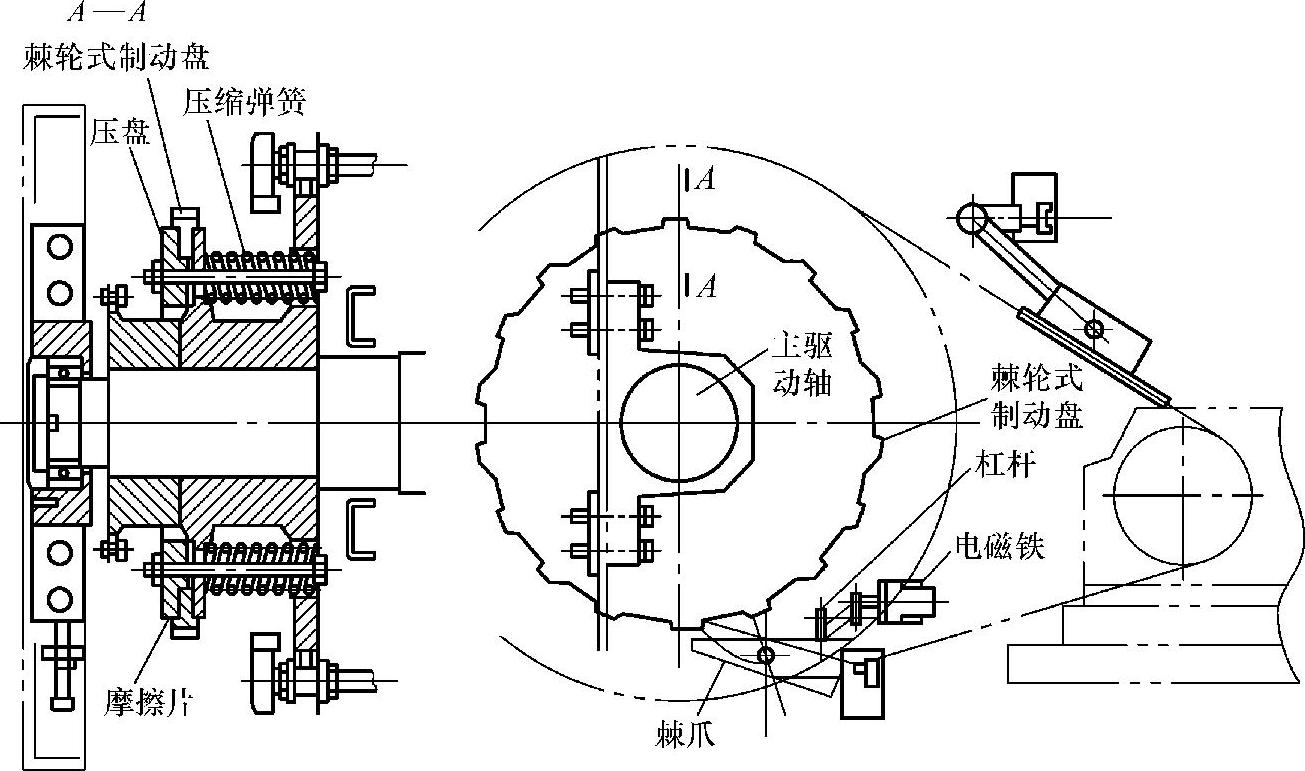
图7-2-1 棘轮式附加制动器
(2)楔形式附加制动器 图7-2-2是一种楔形附加制动装置的结构示意。主要部件包括楔形制动靴、制动盘、电磁铁、制转杆和弹簧等。楔形制动靴和制动盘选用高强度耐磨合金材料。制动盘安装在主驱动轴上(驱动链轮的另一侧)。安全控制系统检测到相应信号,切断电磁铁供电,在弹簧1的作用下,制转杆发生转动,棘爪脱离止动钩,楔形制动靴在弹簧2作用下,向上快速滑行,制动靴楔入制动盘,两金属表面发生接触摩擦,制动盘被卡住并将主驱动轴制停。
这种制动器没有摩擦片,直接由制动靴楔入制动盘产生摩擦力矩,结构上比较简单,制动靴一经楔入制动盘就能产生摩擦力,制动响应快。但需要保证制动靴与制动盘之间的位置准确,在制动中接触良好,同时在使用中还需要注意制动盘表面的清洁,防止有油污,以确保制动盘可靠性。
(3)挡块式附加制动器 图7-2-3是一种挡块式附加制动器结构示意。其作用原理与棘轮式附加制动器相同,都具有摩擦片,不同之处是以挡块式制动盘代替了棘轮式制动盘。挡块焊接在制动盘上,一般是4~6块均匀分布,当安全控制系统检测到相应信号,切断电磁铁供电,制动叉叉入制动盘表面,与挡块相碰阻止制动盘转动,在摩擦片的作用下对梯级链轮试加制动力矩,迫使自动扶梯停止运行。
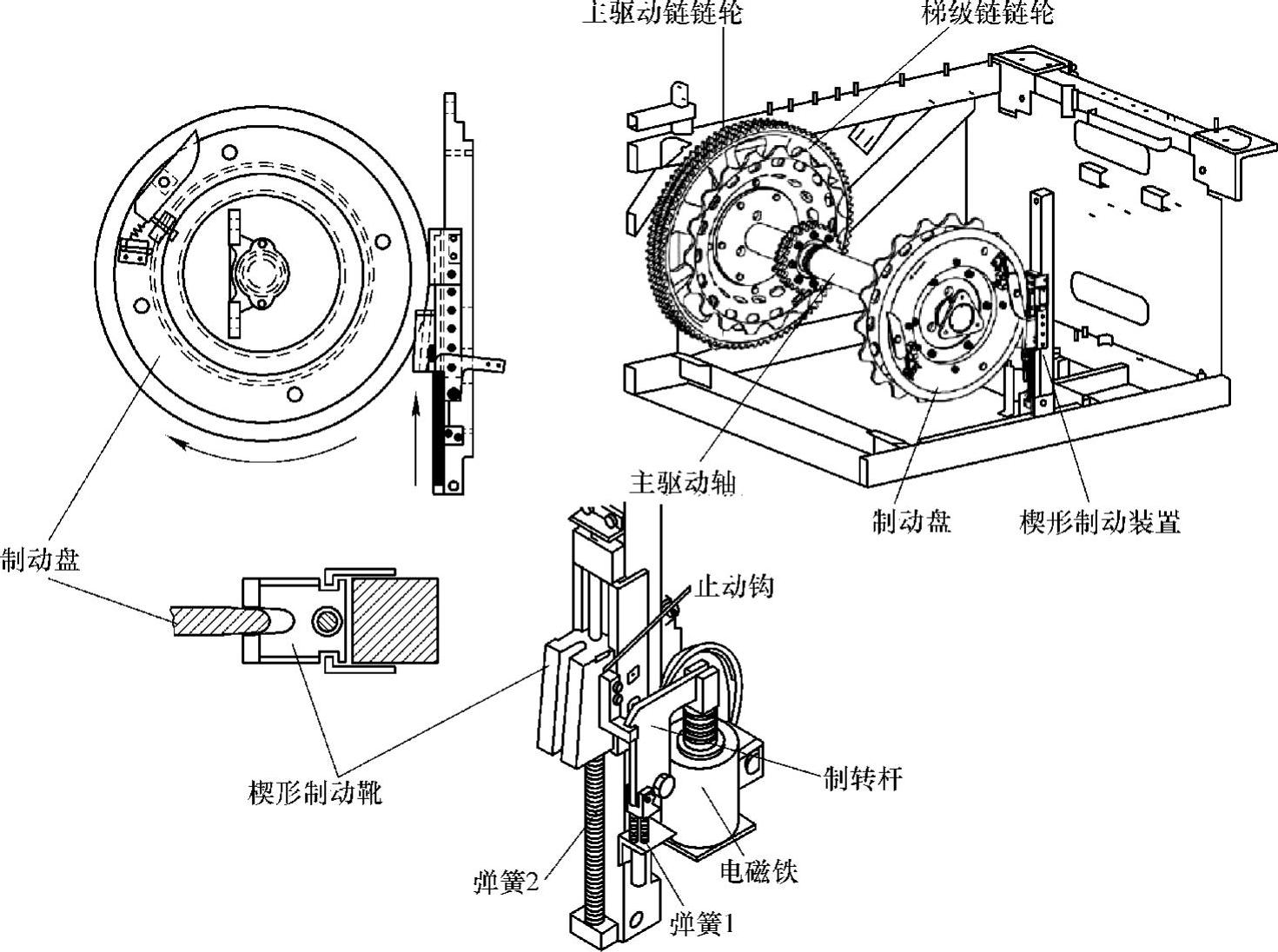
图7-2-2 楔形附加制动器

图7-2-3 挡块式附加制动器
这种制动器结构上比棘轮式简单,但挡块之间存在空挡,当制动叉已动作,但还没有碰上挡块时,制动器实际上尚未动作,因此往往与系统检测信号之间存在一个时间差,当用于逆转保护时,在制动时往往会先出现一段明显的逆转。
无论哪一种设计,附加制动器必须与速度监控装置进行联动,一旦检测到梯级超速、欠速或改变其规定的运行方向时,能立即触发制动。
有关自动扶梯的文章

从上述附加制动器设计要求分析,基本上就是要解决满足制停距离和减速度的问题,而这两个参数与制动力矩有关,也就是如何确定最佳的制动力矩值以满足整体需要的问题。附加制动器的制动力矩需要满足以下条件:1)制动力矩应大于静态制动力矩以使自动扶梯保持静止状态。2)在上述三种失效模式情况下,制动力矩应大于最小制动力矩,而小于最大制动力矩,以同时满足最大加速度和制动距离的要求。......
2023-06-15

环形折弯命令是一种改变模型形状的操作,它可以对实体特征、曲面和基准曲线进行环状的折弯变形。Step6.创建图4.11.10所示的环形折弯特征,操作步骤如下:图4.11.9 选择引导尺寸图4.11.10 创建环形折弯特征选择下拉菜单命令。在图4.11.13所示的“环形折弯”操控板中的“折弯类型”下拉列表中选择;然后分别单击其后的字符,并分别选取图4.11.14所示的两个端面。......
2023-06-20

(一)电梯使用方法使所有的人都了解和熟悉电梯的使用方法,尤其是儿童和老年人,因为很多电梯事故往往是由于电梯使用不当所致。因此电梯使用方法虽然是常识性的东西,但是它是电梯乘客安全搭乘电梯的须知前提,很有必要宣传。平旦搭乘,容易发生安全事故。清洗员在清洗楼板时应防止用水流入轿厢,以免弄湿轿厢地板,致使乘客滑倒。......
2023-06-15

工作制动器也称主制动器,是自动扶梯正常制停时使用的制动器。工作制动器在动作过程中应无故意的延迟现象。制动器的制动力必须由有导向的压缩弹簧或重锤来产生。这种制动器也称为机电式制动器。自动扶梯的工作制动器常使用块式制动器、带式制动器或盘式制动器等。所谓常闭式制动器在不工作期间是闭合的,也就是处于制动状态。......
2023-06-15

造型曲面创建完成后,若曲面之间过渡不够光滑,则需要考虑运用曲面连接使其与其他造型曲面之间形成光滑过渡。在创建曲面连接时,曲面间会产生关联即父子关系,当父项形状发生变化时,子项会随之发生相应改变。所有相交边界曲线必须以相同的角度与同一平面或曲面形成拔模连接。图8-70 控制板2)按下Ctrl键并单击需要连接的曲面,曲面个数可以是两个也可以是更多,单击控制板中的按钮,曲面边界将显示连接符号。......
2023-06-19

接下来将通过Zend Framework构建一个简单的MVC应用。Zend Framework使用单一入口文件,所有的请求都由入口文件进行调配。ZendFramework的核心组件为Zend_Controller_Front,在入口文件中需要对该组件进行初始化。application指定了这是一个应用,它是ZendFramework约束的一个规范,当然名称可自行设置的,但一个入口文件必须要对应一个应用。接下来在controllers目录中创建一个默认的模型,用于验证ZendFramework是否已经搭建成功。......
2023-11-04
在面对自动扶梯出入口的图示部位设置防止儿童误入的隔离板。(二)自动扶梯安全管理1.正确使用方式的指导和呼梯安全意识。给出不让儿童在自动扶梯周围游玩的措施。......
2023-06-15

引导运行功能是当PLC电源开启或从STOP→RUN时,把标准ROM或存储卡中的文件向程序存储器进行自动传输的功能。图8-8 方法1图8-9 方法2图8-10 清空程序数据5.电源复位或STOP→RUN6.“BOOT”指示灯亮如果CPU正面的“BOOT”指示灯亮表示引导运行工作正常。2)引导运行开始至进入运行状态时为止,大约需要2~3s。......
2023-06-16
相关推荐