解 设椭圆.由例2可知,椭圆在点处的曲率最大,即曲率半径最小,且为图3-22显然砂轮半径不超过时才不会产生过量磨损或有的地方磨不到的问题.对于砂轮磨削一般工件的内表面时,也有类似的结论,即选用砂轮的半径不应超过这工件内表面的截线上各点处曲率半径中的最小值.......
2023-11-22
1.工作导轨的设计要求
为了使乘客能安全乘梯,自动扶梯的工作导轨必须保证梯级具有以下特征。
1)梯级踏板在工作分支各个区段应严格保持水平,且不绕自身轴转动。
2)梯级在倾斜区段内各梯级应形成阶梯状。
3)在扶梯上下曲线段,各梯级应有从水平到阶梯状态的逐步过渡过程。
4)相邻两梯级间的间隙,在梯级运行过程中应保持恒值,它是保证乘客安全的必备条件。
5)梯级在前进中必须防止跑偏。
2.工作导轨各参数的确定
(1)上下水平段工作导轨的长度确定 上下水平段工作导轨主要作用是引导梯级在出入口水平运动,使乘客能安全地进出扶梯。其长度的设定,与水平移动的梯级数量有关。水平移动的梯级数量多,乘客就容易登上梯级,搭乘的安全性就好;但水平移动的梯级多会增加扶梯的长度,同时扶梯的造价也会相对较高。对水平梯级的数量,在客户没有特别要求的情况下,一般都以符合GB 16899—2011中的规定为准。
下面以倾斜角为30°、2个水平梯级的上水平段工作导轨为例,介绍一下如何确定上水平段工作导轨的最小长度Lmin,如图5-1-2所示。

图5-1-2 上水平段工作导轨示意图
图5-1-2中,D1为上水平主轮导轨到楼层板表面的距离;D2为中间倾斜主轮导轨到梯级前沿线的距离;t为梯级深度;R1为上曲线工作导轨半径;Lp为水平移动段长度;Ls为梳齿板距TG中心(梯级链轮中心)的距离,与梳齿板的结构设计及梯级翻转的结构设计有关;Dmax为水平移动段两个相邻梯级之间的最大水平高度差;B为梯级前沿线与楼层板面的交点;Lmin为满足安全规范要求时,B点至梯级中心的最小距离。
D1、D2、t、Ls、Dmax均为已知参数,计算上水平段工作导轨长度Lmin的值的过程如下:
根据上R部(倾斜段与上水平段的圆弧过渡部分)圆弧圆心与切点的半径分别延长至楼面板与梯级前沿线,则
α+β=30°
计算得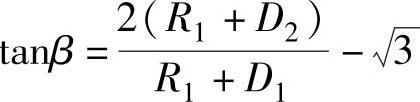
按GB 16899—2011要求,水平运动部分相邻梯级之间的水平高度差最大允许为Dmax=4mm,则该部分水平距离为

2个水平梯级时 Lp=2t
由上述公式可以算出B点到TG中心(梯级链轮中心)的距离为
Lmin=Lb-Lc-d+Lp+Ls
式中 Lb、Lc、d见图5-1-2上的标示。
3水平级时,只是LP的尺寸需变换(Lp=3t),可以据此推算出上水平部的尺寸Lmin。
而当导轨曲率半径变化时,则会引起α、β角度的变化,导致Lb尺寸变化。所以导轨半径越小,Lmin值也越小。
使用同样的方法可以确定下水平部工作导轨的长度,这里不作详细计算。
(2)上下曲线段工作导轨的半径确定 梯级具有两只主轮和两只副轮,要使梯级达到前面所述的梯级运动要求,主、副轮必须有各自的梯路导轨才行。根据上述计算可知,上、下曲线段工作导轨的曲率半径越小,扶梯的长度越短,其造价也越低。但采用大的曲率半径有利于梯级在作过渡运动时的平稳性,从而提高搭乘的安全性。因此曲率半径首先符合GB 16899—2011的规定。
在条件允许的情况下,为节省自动扶梯所占空间,制造厂一般取满足GB 16899—2011的曲率最小值作为上下工作导轨曲率半径。
(3)主、副轮工作导轨位置的确定 要满足梯级在工作导轨各区域段上运行时踏面始终保持水平,需要处理主、副轮工作导轨面的距离与梯级的结构尺寸之间的关系。
1)水平段主、副轮工作导轨位置的确定。如图5-1-3所示,当主、副轮的滚轮半径相同时,上下水平段主、副轮工作导轨面的距离等于梯级主、副轮中心在垂直方向上的投影长度a;当主、副轮的滚轮半径不相同时,上下水平段主、副轮工作导轨面的距离等于梯级主、副轮中心在垂直方向上的投影长度a减去主轮导轨与副轮导轨的半径差。
图5-1-3中,a为梯级主、副轮中心在垂直方向上的投影;b为梯级主、副轮中心在水平方向上的投影;c为梯级踏面到梯级主轮中心的垂直距离;d为梯级前沿线到梯级主轮中心的水平距离。r为主、副轮的半径,这里假设主、副轮半径相同。
因同一个自动扶梯生产厂的梯级尺寸是固定的,因此a、b、c、d、r值也是固定值。
2)倾斜直线区段主、副轮工作导轨位置的确定。根据梯级结构尺寸即可确定倾斜直线区段主、副轮工作导轨的轨迹,如图5-1-4所示。

图5-1-3 上下水平部主、副轮工作导轨位置设计示意图
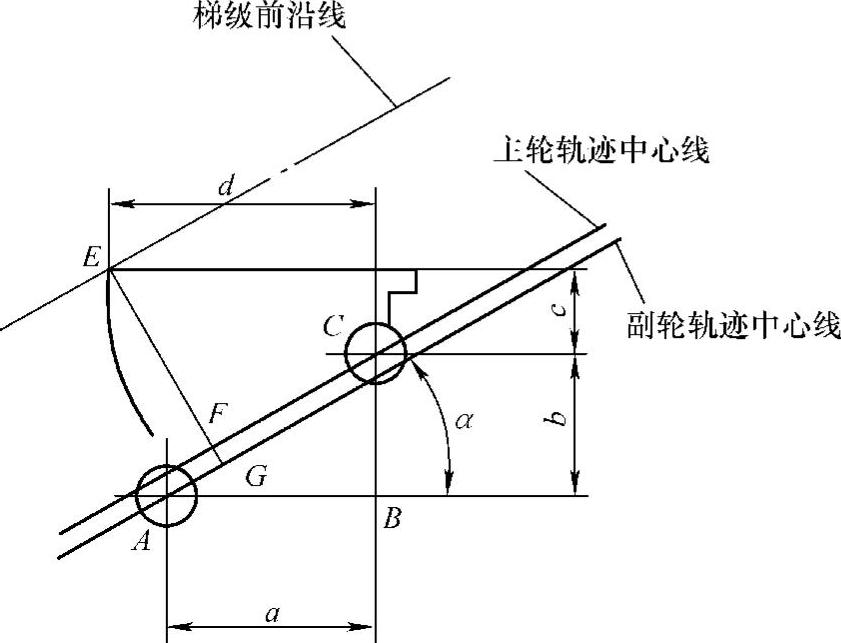
图5-1-4 倾斜直线区段主、副轮工作导轨位置设计示意图
•主副轮导轨高度差确定:主、副轮导轨高度差主要决定于梯级结构,设计导轨之前必须了解主、副轮导轨高度差。
从图5-1-4中可以推导出倾斜直线区段主、副轮工作导轨高度差:
主、副轮导轨高度差LFG=bcosα-asinα(这里按主、副滚轮直径相同计算,当其直径不同时,须增加滚轮半径差)。
•主轮工作导轨高度尺寸的确定:工作导轨的位置尺寸同样由梯级结构尺寸决定,由图5-1-4可以推导出主轮工作导轨高度尺寸:
主轮工作导轨高度尺寸LEF=ccosα+dsinα+r(其中r表示前轮半径)
3)主、副轮工作导轨曲率中心坐标的确定。由于梯级在前进侧梯级面始终应保持水平,且相邻两梯级间的间隙保持一致,所以其运行轨迹圆弧段与水平段及倾斜段都应相切,且主、副轮导轨在上部或下部的曲率半径应一致,如图5-1-5所示。

图5-1-5 梯路系统前进侧上、下曲线区段图
H—自动扶梯的提升高度 α—自动扶梯倾斜角度
有关自动扶梯的文章

解 设椭圆.由例2可知,椭圆在点处的曲率最大,即曲率半径最小,且为图3-22显然砂轮半径不超过时才不会产生过量磨损或有的地方磨不到的问题.对于砂轮磨削一般工件的内表面时,也有类似的结论,即选用砂轮的半径不应超过这工件内表面的截线上各点处曲率半径中的最小值.......
2023-11-22

返回导轨是非工作导轨,不要求梯级保持水平,因此只需从结构、安装、维修及节省空间等方面考虑即可。即R3与R4是根据自动扶梯结构和生产厂家的加工模具而定的。在不影响自动扶梯性能的情况下,为了节省模具的开模费用,一般R3与R4的尺寸确定之后不轻易改变。......
2023-06-15
下面研究曲线各部分的弯曲程度.观察下面的两张图(图3-16(a)和(b)).图3-16在图3-16(a)中,曲线L与L1为平面上两条连续光滑的曲线,在L与L1上分别取长度都等于Δs的弧段在曲线L上动点沿弧从点P移动到点Q时,其切线也连续转动,设其倾斜角的改变量(即弧段两端切线的夹角)为Δα,同样设曲线L1上动点沿弧从点P移动到点Q1时,其切线的倾角的改变量(即弧段两端切线的夹角)为Δα1,从图3-......
2023-11-19

吴浩宇1,周春桂1,董方栋2,汤雪志1,王志军1摘要:在传统的双层药型罩形成串联EFP 的基础上,提出一种外罩开槽式的新型双层药型罩结构。利用ANSYS/LS-DYNA 软件对该结构的成型进行了数值模拟与分析,并分析了曲率半径对其形成毁伤元的影响。......
2023-06-23

在活性杆式射流形貌方面,活性球缺罩壁厚主要影响活性杆式射流的直径和长径比,随着活性球缺罩壁厚增加,活性杆式射流直径变大,但长度变化较小,导致活性杆式射流长径比减小。图2.66药型罩壁厚对活性杆式射流粒子分布的影响图2.6......
2023-06-18

重载型自动扶梯的导轨和支架需要作强化设计,以应对大客流的负载和在紧急情况下作为固定楼梯使用,以及不小于20年的工作寿命。卸载导轨宜采用非金属材料,且应便于调节。图11-3-36 卸载导轨5.导轨支架导轨支架应有足够的强度和刚度,表面热镀锌,锌层平均厚度不小于50μm。导轨支架的布置间距应满足导轨挠度的要求。......
2023-06-15
导轨需要有足够的强度和刚度,以下介绍以有限元分析法进行强度校核的一般方法。由于自动扶梯在运行中,梯级轮对导轨重复施加载荷,因此强度分析主要是对导轨进行疲劳评价。......
2023-06-15

相关推荐