端部轮驱动式扶手带驱动装置是采用安装在自动扶梯上端部的带V形槽的驱动轮,配用V形扶手带,类似于三角带的传动方式。端部驱动轮带有V形槽,扶手带上的三角带楔入V形槽而产生摩擦驱动力。端部驱动轮由扶手带驱动链驱动,驱动动力来自主驱动轴。......
2023-06-15
摩擦轮式扶手带驱动装置通过大直径的驱动轮(通常为ϕ600~ϕ900mm)和扶手带间的摩擦力对扶手带进行驱动。为保证足够的摩擦力,通过张紧装置对扶手带施加一定的预紧力,对摩擦驱动力的大小进行控制。
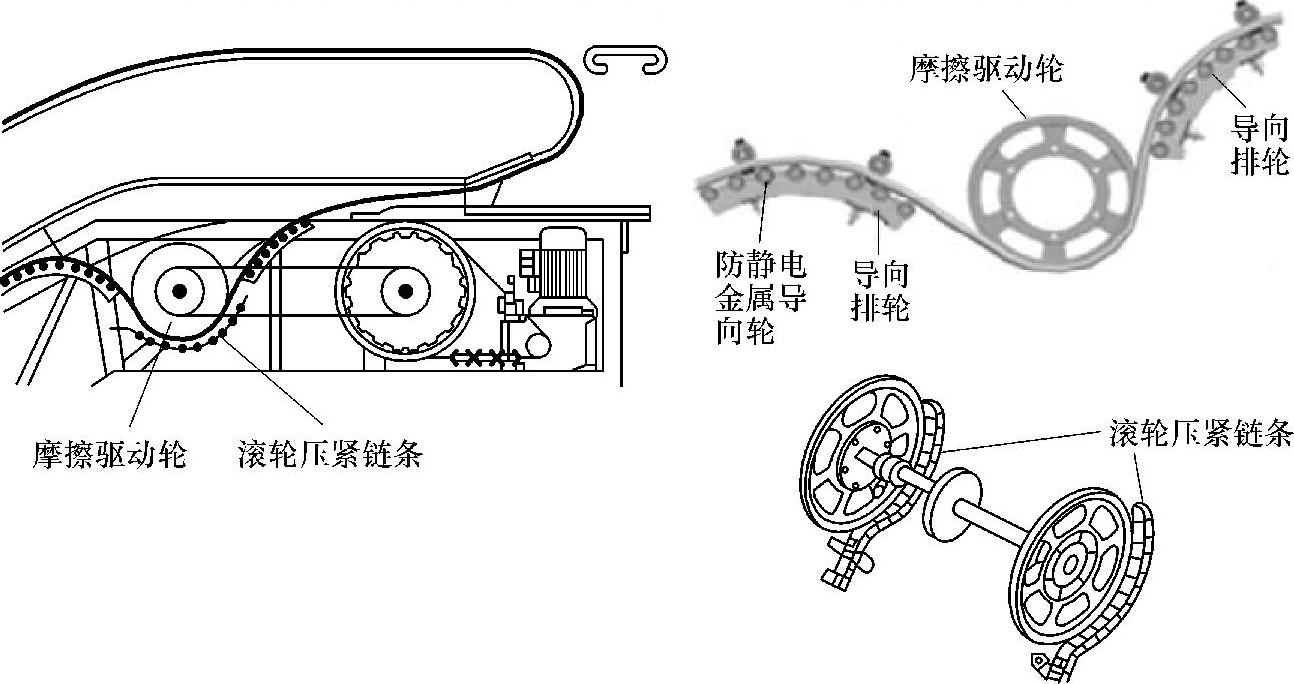
图4-2-1 摩擦轮式扶手带驱动装置
1.结构
如图4-2-1所示,摩擦轮式扶手带驱动装置主要由摩擦驱动轮、滚轮压紧链条、导向排轮、防静电金属导向轮等组成。摩擦轮式扶手带驱动装置一般位于扶梯上部靠水平段处,左右各有一个驱动轮。
(1)摩擦驱动轮 摩擦驱动轮的金属轮外缘包有橡胶或聚氨酯,以增大与扶手带之间的摩擦力,其中橡胶型摩擦驱动轮能产生较大的摩擦动力,适合室内和室外应用,但其缺点是橡胶容易磨损。当橡胶磨损后轮径变小,扶手带速度降低,影响与梯级速度的同步,当扶手带速度慢于梯级速度时,摩擦轮就需要更换。聚氨酯型摩擦驱动轮的耐磨性好,摩擦轮使用寿命长,但通常仅适合室内扶梯应用。
(2)滚轮压紧链条(或压紧传动带) 滚轮压紧链条由一排滚轮组成,压紧在扶手带表面,使扶手带的内表面与摩擦驱动轮外缘的包胶紧贴而产生摩擦力。也有的驱动装置以压紧传动带来压紧扶手带。由于传动带压紧系统的安装定位要求较高,不容易测量,所以容易造成安装不到位产生对扶手带的压紧力不足现象,使得传递的驱动力不足,并容易产生滑动摩擦。但是,由于传动带式的压紧方式与扶手带的接触面积比滚轮式的大,在传递同等驱动力的情况下,传动带式的传动方式更有利于扶手带长期使用。
(3)导向排轮 在摩擦驱动轮的两侧设有导向排轮,具有扶手带导向作用和张紧作用。通过调整导向排轮,可以调整扶手带和摩擦轮接触包角的大小及扶手带在长度上的张紧作用。
2.特点
摩擦轮驱动结构简单、容易调整,能产生较大的摩擦驱动力,被广泛用于普通自动扶梯。但这种结构需要扶手带作较大的弯曲,尤其是当摩擦驱动轮直径尺寸较小时,扶手带在驱动轮处弯曲较大,会使扶手带驳接口容易开裂或唇口变软变形而影响扶手带的使用寿命,因此采用这种装置时对扶手带抗弯曲性能有较高的要求,一般不宜采用钢带结构的扶手带。
采用这种结构的驱动时,扶手带在工作中正、反弯曲的次数多,使得扶手带在运动中摩擦阻力增大,导致驱动系统的能耗相对较大。在运行中需要重视对扶手带预紧力的合理调整,过度张紧时,容易造成扶手带发热而缩短扶手带的使用寿命。
3.系统运动阻力分析计算与驱动功率计算
多数情况下,通过对自动扶梯扶手带的运动阻力分析计算出驱动功率,各厂家都有自己的经验公式,以下介绍的是一种采用逐点法并应用柔韧体摩擦力欧拉公式进行分析与计算的方法。
首先通过计算扶手带运动系统中存在的总阻力,然后得出克服这些阻力而需要的最大扶手带驱动功率。明确了驱动功率的要求,就可以指导摩擦驱动轮等零件的具体设计,也为自动扶梯驱动主机功率的设计提供数据。
(1)阻力分析 扶手运动系统所需克服的总阻力,可以采用逐点法进行分析。图4-2-2是扶手带摩擦轮驱动结构的扶手带运动系统阻力示意图,以自动扶梯在向上运行状态下的情况为例进行分析。
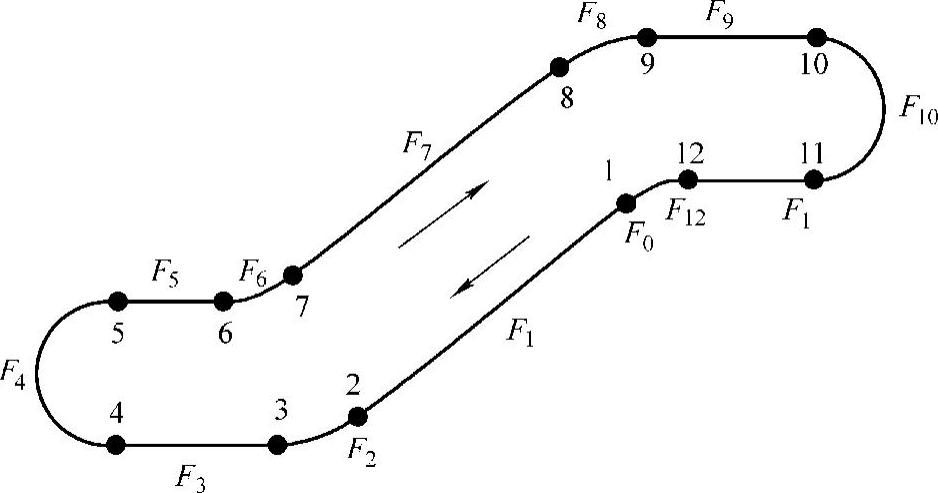
图4-2-2 扶手带阻力示意图
1)设定驱动点在图4-2-2所示的点1位置,扶手带设置的预紧力Po是在点1左侧。
2)F12是点1和点12之间的摩擦阻力,由于F12是扶手带驱动系统中的阻力最大值,也就是要求摩擦轮产生的扶手带驱动力。
3)在图4-2-2中,扶手带共需要通过6个弯曲段,点10到点11是上部转弯端,点4到点5是下部转弯端,扶手带这两个端部弧段的接触包角皆为αn。
4)点6到点7是下部弯曲段,点8到点9是上部弯曲段;点1到点12是扶手带在大摩擦轮外的过渡弯曲段,点2到点3是扶手带在下部张紧装置上的弯曲段。扶手带这四部分弧段的接触包角皆设定与自动扶梯的倾角相同,为α。
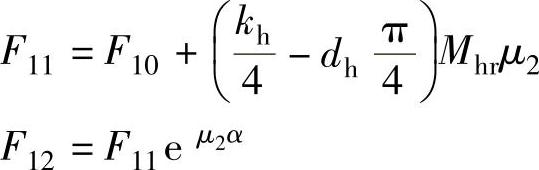
(2)阻力计算和驱动功率计算 以上所述这些弯曲段的阻力,可以通过应用柔韧体摩擦力欧拉公式进行计算;其他的直线段的摩擦阻力,可根据正压力和摩擦因数进行计算,将其综合,可以对图4-2-2所示12个位置点的摩擦阻力得出如下的计算式
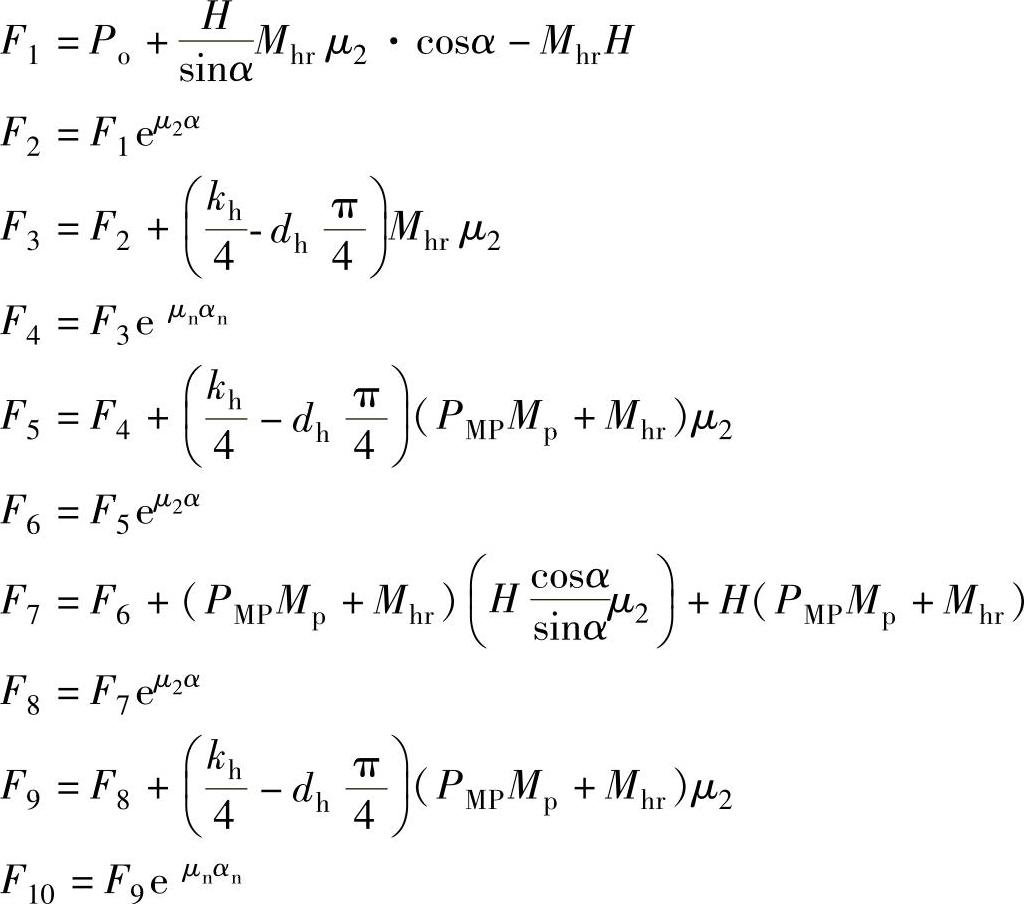
式中 Po——扶手带预紧力,单位为N;
H——扶梯提升高度,单位为m;
α——扶梯倾斜角,单位为(°);
Mhr——每米扶手带质量,单位为kg/m;
μ2——扶手带与导轨之间的滑动摩擦因数;
μn——扶手带与端部滚子导轮之间的滚动摩擦因数;
dh——扶手带在上下端的转弯直径,单位为m;
αn——扶手带在上下端的包角,单位为(°);
Mp——扶手带上乘客载荷,kg/m;
PMP——乘客载荷比例,满载时取100%。
从以上的计算式中可知,扶手带在各位置的摩擦阻力与弯曲半径的大小、包角、摩擦因数、预紧力等参数有关,同时还与扶梯的提升高度有关。通过上述方法的计算,可最终得出扶手带驱动点上的力Fhr,从而得出所需要的驱动力为
Fhr=2F12 (双侧扶手带)
则系统需提供的驱动功率为
Phr=FhrV
式中 Phr——系统需提供的驱动功率,单位为W;
V——扶手带速度,单位为m/s。
有关自动扶梯的文章

端部轮驱动式扶手带驱动装置是采用安装在自动扶梯上端部的带V形槽的驱动轮,配用V形扶手带,类似于三角带的传动方式。端部驱动轮带有V形槽,扶手带上的三角带楔入V形槽而产生摩擦驱动力。端部驱动轮由扶手带驱动链驱动,驱动动力来自主驱动轴。......
2023-06-15

去静电 扶手带在运行时与导轨发生摩擦,在扶手带表面会积聚静电荷,特别是在较为干燥的天气,静电荷的积聚量会较大,当手扶扶手带后会产生触电感,因此在重载型自动扶梯上一般都安装有去静电的装置。......
2023-06-15

由于该驱动系统各驱动滚轮排列成直线状态,因此称之为直线压滚式扶手带驱动装置,简称直线驱动装置。驱动滚轮仍然是由扶手带驱动链条加以驱动,但链条不对驱动滚轮产生正压力,因此驱动滚轮在工作中只受切向力,所需要的驱动力要小于链条张紧式扶手带驱动装置。图4-2-6 带有摩擦驱动带的扶手带直线驱动装置3.驱动力分析计算下面对弹簧压紧式扶手带驱动装置所能产生的最大驱动力F2HLD的分析与计算作简要介绍。......
2023-06-15

扶手带及扶手带驱动系统主要由扶手带、扶手带驱动装置、扶手带导轨及扶手张紧装置等组成。与自动扶梯相同,扶手带驱动系统有大摩擦轮驱动、直线型扶手驱动及端部驱动三种方式。......
2023-06-15

摩擦阻力会令扶手带发热升温,温升过高会损坏扶手带的性能并会缩短扶手带的使用寿命。因此对端部转向段需要采取措施,减少扶手带在端部转向时的摩擦阻力,对扶手驱动系统的正常运行有十分重要的意义。在转向段的导轨中镶入滚轮以减少摩擦阻力,当扶手带通过时,滚轮的转动消除了扶手带与导轨之间的滑动摩擦,使阻力大为下降。......
2023-06-15

每台简易升降机至少应有一套专用的驱动装置,且驱动装置应固定可靠,其承重结构应有足够的强度。图2-7 曳引轮相关防护装置对两个独立的电气装置;要防止因其中某个电气装置的触点粘连故障而发生意外事故;对于两个或两个以上的电气装置同时发生触点粘连故障不予考虑。当悬臂式曳引轮或链轮的钢丝绳意外跳槽时,易发生钢丝绳全部或部分无支承点引发曳引力不足,导致货厢冲顶或蹲底事故的发生,所以必须设置相关的预防措施。......
2023-07-01

尤其不能将扶手带折弯,否则扶手带的使用寿命将缩短50%。当扶手带表面有发热情况时,应尽快对扶手带的驱动装置和导向机构进行检查和调整,排除不良因素。变形 反复弯曲导致开口尺寸变大,扶手带与导轨的配合发生松动,与导轨的侧隙超过8mm。......
2023-06-15
相关推荐