实验证明,NBES的测量精度远高于单波束。1976年,数字化计算机处理及控制硬件应用于多波束系统,从而产生了第一台多波束扫描测深系统,简称SeaBeam。通过波束间的内插处理,还可以形成15个波束,声线弯曲改正后便可获得实测深度。表3-1多波束系统及其主要技术指标续表图3-6、图3-7为两种多波束测深系统实物图。......
2023-11-29
3.4.2 多波束测深数据处理
实际测量中,换能器的发射和接收是按照一定的模式进行的。通常,发射波束的宽度横向大于纵向,接收波束宽度纵向大于横向。如对于波束为16,波束宽度为2°×2°的多波束而言,其发射波束在横向为44°,纵向为2°;而对于每个接收波束,横向为2°,纵向为20°。将发射波束在海底的投影区同接收波束在海底的投影区相重叠,对于每个接收波束,在海底实际有效接收区为长宽均为2°的矩形投影区,即波束脚印。多波束的几何构成如图3-9所示。
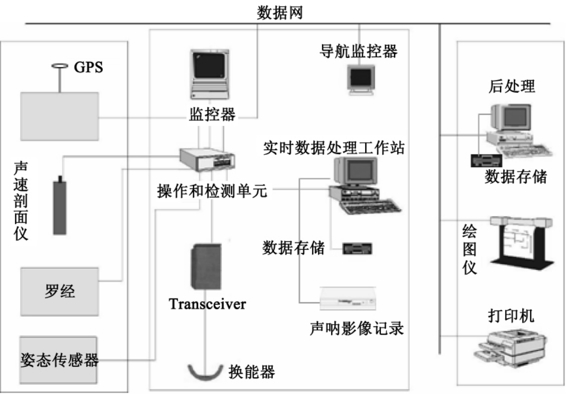
图3-8 Simrad EM950/1000系统的单元组成
由于多波束的最终测量成果需要在地理框架下表达,因此波束在海底投射点的位置计算是多波束数据处理中的一个关键。多波束采用广角度定向发射、多阵列信号接收和多个波束形成处理等技术,为了更好地确定波束的空间关系和波束脚印的空间位置,必须首先定义多波束船体参考坐标系VFS(vessel frame system)(如图3-9或图3-10),并根据船体坐标系同当地坐标系LLS(local location system)之间的关系,将波束脚印的船体坐标转化到地理坐标系(或当地坐标系)和某一深度基准面下的平面坐标和水深。该过程即为波束脚印的归位。船体坐标系原点位于换能器中心,x轴指向航向,z轴垂直向下,y轴指向侧向,与x、z轴构成右手正交坐标系。当地坐标系原点为换能器中心,x轴指向地北子午线,y同x垂直指向东,z与x、y轴构成右手正交坐标系。
波束在海底投射点位置的计算需要船位、潮位、船姿、声速剖面、波束到达角和往返程时间等参数。计算过程主要包括如下4个步骤:
①姿态改正。换能器的动吃水对深度有着直接影响。横摇对波束到达角有一定的影响,对于补偿性多波束系统,船体的横摇在波束接收时已经得到改正;对于无补偿性系统,通过扩大扇面角来实现回波的接收。纵摇一般较小,可以不考虑,但当纵摇达到一定的程度时,深度和平面位置的计算均会受到影响,因此必须考虑。
②船体坐标系下波束投射点位置的计算。根据波束到达角(即波束入射角)、往返程时间和声速剖面,计算波束投射点在船体坐标系下的平面位置和水深。
③波束投射点地理坐标的计算。根据航向、船位和姿态参数计算船体坐标系和地理坐标系之间的转换关系,并将船体坐标系下的波束投射点坐标转化为地理坐标。
④波束投射点高程的计算。根据船体坐标系原点与某一已知高程基准面之间的关系,将船体坐标系下的水深转化为高程。
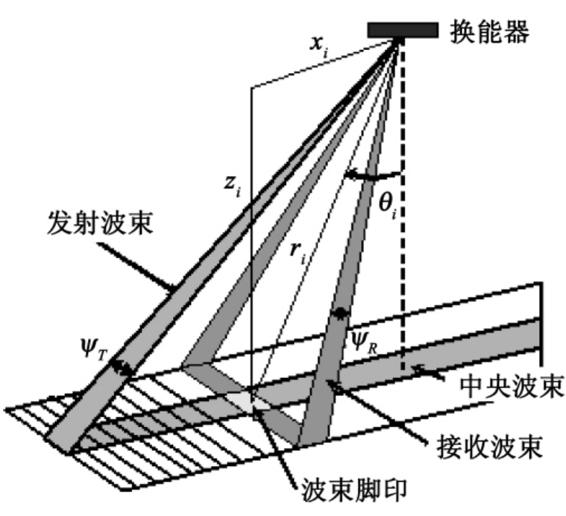
图3-9 多波束的几何构成
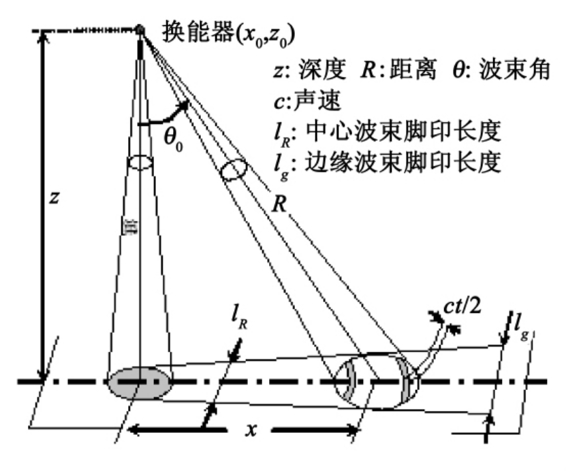
图3-10 单个波束信号的接收
波束脚印船体坐标的计算需要用到垂直参考面下的波束到达角、传播时间和声速剖面三个参量。由于声线在海水中不是沿直线传播,而是在不同介质层的界面处发生折射,因此波束在海水中的传播路径为一折线。为了得到波束脚印的真实位置,就必须沿着波束的实际传播路线跟踪波束,该过程即为声线跟踪。通过声线跟踪得到波束投射点在船体坐标系中的坐标,其计算过程称为声线弯曲改正。在声线弯曲改正中,声速剖面起着十分重要的作用。为计算方便,对声速剖面作如下假设:
①声速剖面精确,无代表性误差。每次测量前后需对声速剖面进行测定,水域变化复杂时,要加密声速剖面采样站和减小站内声速断面采样的层间隔。
②声速在波束传播的垂面内发生变化,不存在侧向变化。对于不满足该要求的水团,需要加密声速剖面采样站和减小采样层的深度间隔。
③声速在海水中的传播遵循Snell法则。
根据声速及声线跟踪思想,采用层内常声速假设,给出波束在海底投射点的计算模型。
Snell法则如下:(www.chuimin.cn)

式中:ci和θi分别为层i内声速和入射角。
设多波束换能器在船体坐标系下的坐标为(x0,y0,z0),则根据水层内常声速变化假设,采用常声速(零梯度)层追加思想,波束脚印的船体坐标(x,y,z)为:
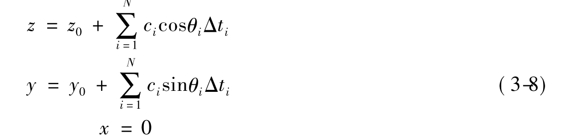
式中:θi为波束在层i表层处的入射角,ci和Δti为波束在层i内的声速和传播时间。
其一级近似式为:
z= z0+ c0 Tp cosθ0/2,y= y0+ c0 Tp sinθ0/2,x= 0 (3-9)
式中:Tp为波束往返程时间;θ0为波束初始入射角;c0为表层声速。
波束脚印的船体坐标确定后,便可按式(3-10)将之转化为地理坐标。

式中:下脚LLS、G、VFS分别代表波束脚印的地理坐标、GPS确定的船体坐标系原点坐标和波束脚印在船体坐标系下的坐标;R为船体坐标系与地理坐标系的旋转关系,航向h、横摇r和纵摇p是三个欧拉角。
若换能器活性面中心被选作船体坐标系的原点,式(3-9)确定的深度z仅为换能器面到达海底的垂直距离,实际深度还应考虑换能器的静吃水hss、动吃水hds、船体姿态对深度的影响ha,若潮位h tide是根据某一深度基准面或者高程基准面确定的,则波束在海底投射点的高程为:
h= htide-(z+ h ss+ hds+ h a) (3-11)
换能器的静吃水在换能器安装后量定,作为一个常量输入到多波束数据处理单元中;动吃水可通过姿态传感器Heaven参数确定。船体姿态对波束脚印地理坐标也有一定的影响,它会使ping扇面绕x或y轴产生一定的旋转,其旋转角量可通过姿态传感器的横摇r和纵摇p参数确定。上述参数测定及其对波束脚印平面位置和深度的影响以及补偿可参见相关的参考书。
当测区处于验潮站或水文站的有效作用距离范围内时,潮位h tide的变化可以通过潮位观测获得,否则需通过潮位模型或其他方法获得。由于潮位是相对某一深度或高程基准面确定的,因而经过潮汐改正后,即实现了相对水深向绝对高程的转换。
经上述处理后,最终得到了海床的DEM(见图3-11)。
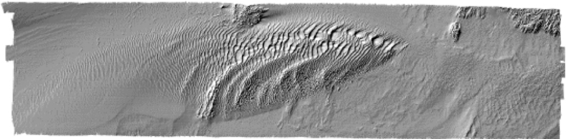
图3-11 多波束测量获得的水下地形DEM
有关海洋调查技术及应用的文章

实验证明,NBES的测量精度远高于单波束。1976年,数字化计算机处理及控制硬件应用于多波束系统,从而产生了第一台多波束扫描测深系统,简称SeaBeam。通过波束间的内插处理,还可以形成15个波束,声线弯曲改正后便可获得实测深度。表3-1多波束系统及其主要技术指标续表图3-6、图3-7为两种多波束测深系统实物图。......
2023-11-29

格网化和回波强度数据抽样工作完成的优劣,直接影响着多波束声呐图像质量的好坏,也影响着图像对海底地貌以及底质类型的反映。经过抽样和量化后,便形成了多波束声呐图像。图5-9是根据上述方法形成的某个测区的多波束声呐图像。......
2023-11-29

对26个原苏东国家的民主转型案例的测量分为条件和结果。特别要指出的是,转型前的经济状况用转型开始那一年的人均国内生产总值和每升石油的国内生产总值产出来表示,这两个变量的数据均来源于世界银行发展指数。[28]表4-1结果变量和条件变量的设定......
2023-08-16

在新媒体机构的运营过程中,如果要充分地使用大数据技术,首先就应当具备一套比较完善的数据挖掘体系。一般来说,新媒体机构数据挖掘体系的建设可以从使用者的视角来审视,从四个基本环节来实现。作为新媒体机构搭建大数据处理体系的第一步,如何获取数据是相当重要的。它决定了新媒体机构是否能够高效、快速地收集到尽可能多的数据,以便于下一步进行相应的数据处理。......
2023-11-22

可惜此外也没什么好办法,因为语文能力的提高要靠多读多写,长期积累,不能速战速决。这是多读作用的初步,因而笔能达意。多读,熟了,积蓄在两方面增多,既有内容可写,又熟悉如何表达,作文的困难自然就没有了。准此理,多读多写并非难事,办法是养成习惯,使之成为乐趣。......
2023-08-07

如测量人员技术不熟练,量具使用不当或者视力较差等原因引起的测量误差。1)随机误差及其处理随机误差是指在同一测量条件下,多次测量同一被测量时,误差的绝对值和符号没有确定变化规律的误差。④抵偿性随着测量次数的增多,随机误差的算术平均值趋于零。实验对比法是用不同的仪器进行测量,通过对比测量结果发现系统误差的方法。......
2023-06-15
多因素变量配方是指一个配方中有两个或两个以上助剂的加入量影响制品性能的配方。目前常用的多因素变量设计法主要有正交设计法和中心复合试验法,本书重点介绍正交设计法。(一)正交设计法正交设计法是一种应用数理统计原理进行科学地安排与分析多因素变量的一种试验方法。[例二]PVC复合板配方正交设计本配方的组分为:聚氯乙烯、邻苯二甲酸二辛酯、三碱式硫酸铅、石蜡、硬脂酸、氯化聚乙烯及赤泥等。......
2023-06-26

相关推荐