所谓多个基准站的局部区域差分GPS系统是在一个较大的区域布设多个基准站,以构成基准站网,其中常包含一个或数个监控站,位于该区域中的用户根据多个基准站所提供的改正信息经平差计算后求得用户站定位改正数。图2-3是GPS动态相对定位示意图。......
2023-11-29
2.3 广域差分GPS(WADGPS)定位
广域差分GPS定位是针对局域差分GPS定位中存在的问题,将观测误差按误差的不同来源划分成星历误差、卫星钟差及大气折射误差来进行改正,以提高差分定位精度和可靠性。广域差分GPS定位的基本思想是在一个相当大的区域中用相对较少的基准站组成差分GPS网,各基准站将求得的距离改正数发送给数据处理中心,由数据处理中心统一处理,将各种GPS观测误差源加以区分,然后再传送给用户。这种系统称为广域差分GPS系统。广域差分GPS是通过对星历误差、卫星钟差及大气延时误差三种误差源加以分离,并进行“模型化”来实现对用户站的误差源改正,以达到削弱这些误差,改善用户定位精度的目的。
1.星历误差
广播星历是一种外推星历,精度较低,其误差影响与基准站和用户站之间的距离成正比,是GPS定位的主要误差来源之一。广域差分GPS依赖区域中基准站对卫星的连续跟踪,对卫星进行区域精密定轨,确定精度星历,并以之取代广播星历。
2.大气延时误差
普通差分GPS提供的综合改正值,包含基准站处的大气延时改正。当用户站的大气电子密度和水汽密度与基准站不同时,对GPS信号的延时量也不一样,使用基准站的大气延时量来代替用户站的大气延时量必然会引起误差。广域差分GPS技术通过建立精确的区域大气延时模型,能够精确地计算出其对区域内不同地方的大气延时量。
3.卫星钟差误差
普通差分GPS利用广播星历提供的卫星钟差改正数,这种改正数近似反映卫星钟与标准GPS时间的物理差异,残留的随机钟误差约有±30ns,等效伪距为±9m。广域差分GPS可以计算出卫星钟各时刻的精确钟差值。
广域差分GPS主要由主站、监测站、数据通信链和用户设备组成(图2-4)。
①主站。根据各监测站的GPS观测量,以及各监测站的已知坐标,计算GPS卫星星历并外推12 h星历;建立区域电离层延时改正模型,拟合出改正模型中的8个参数;计算出卫星钟差改正值及其外推值,并将这些改正信息和参数传送到各发射台站。
②监测站。一般设有一台铯钟和一台双频GPS接收机。各测站将伪距观测值、相位观测值、气象数据等通过数据链实时发射到主站。测站的三维地心坐标应精确已知,监测站的数量不应少于4个。
③数据通信链。广域差分GPS的数据通信包括两部分,即监测站与主站之间的数据传递和广域差分GPS网与用户之间进行的数据通信。数据通信可采用数据通信网,如Internet或其他数据通信专用网,或选用通信卫星。(www.chuimin.cn)
④用户设备。一般包括单站GPS接收机和数据链的用户端,以便用户在接收GPS卫星信号的同时,还能接收主站发射的差分改正数,并据之以修正原始GPS观测数据,最后解出用户站的位置。
广域差分GPS提供给用户的改正量是每颗可见GPS卫星星历的改正量、时钟偏差修正量和电离层时延改正模型,其目的就是最大限度地降低监控站与用户站间定位误差的时空相关性和对时空的强依赖性,改善和提高实时差分定位的精度。
广域差分GPS主站、监测站与用户站的站间距离从100km增加到200km,定位精度不会出现明显的下降,即定位精度与用户和基准站(监测站)之间的距离无关。大区域内建立广域差分GPS网比区域GPS网需要的监测站数量少,投资小。广域差分GPS具有较均匀的精度分布,在其覆盖范围内任意地区定位精度大致相当,而且定位精度较局域差分GPS系统高。广域差分GPS覆盖区域可以扩展到区域差分GPS不易发挥作用的地域,如海洋、沙漠、森林等。广域差分GPS系统使用的硬件设备及通信工具昂贵,软件技术复杂,运行和维持费用较局域差分GPS高得多。

图2-4 广域差分GPS系统
美国联邦航空局(FAA)在广域差分GPS的基础上,提出利用地球同步卫星(GEO),采用L1波段转发差分GPS修正信号,同时发射调制在L1上的C/A码伪距的思想,称为广域增强GPS系统(WAAS),见图2-5。这一系统完全抛弃了附加的差分数据通信链系统,直接利用GPS接收机天线识别、接收、解调由地球同步卫星发送的差分数据链。而且,该系统利用地球同步卫星发射的C/A码测距信号,可以增加测距卫星源,提高该系统导航的可靠性和精度。鉴于WAAS系统的优越性,世界各国正在构建自己的WAAS系统(如图2-6所示)。
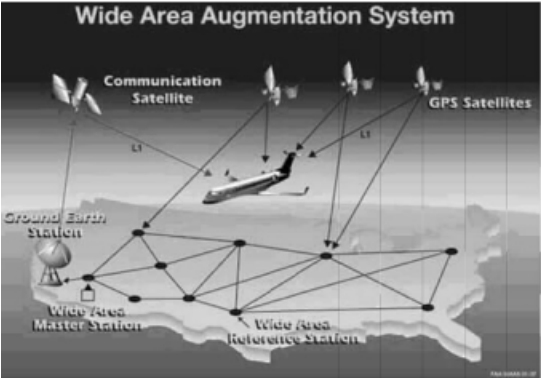
图2-5 WAAS系统
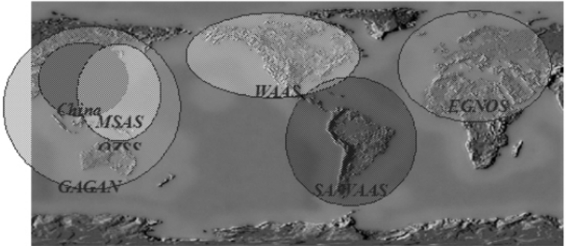
图2-6 世界已建或在建的WAAS系统
有关海洋调查技术及应用的文章

所谓多个基准站的局部区域差分GPS系统是在一个较大的区域布设多个基准站,以构成基准站网,其中常包含一个或数个监控站,位于该区域中的用户根据多个基准站所提供的改正信息经平差计算后求得用户站定位改正数。图2-3是GPS动态相对定位示意图。......
2023-11-29

实验证明,NBES的测量精度远高于单波束。1976年,数字化计算机处理及控制硬件应用于多波束系统,从而产生了第一台多波束扫描测深系统,简称SeaBeam。通过波束间的内插处理,还可以形成15个波束,声线弯曲改正后便可获得实测深度。表3-1多波束系统及其主要技术指标续表图3-6、图3-7为两种多波束测深系统实物图。......
2023-11-29

这种“经典的”海洋调查方法提供的是离散的、非同步的、有限的海洋数据。1970年,前苏联应用几十个资料探测浮标和五六艘以最新仪器装备的调查船,在北大西洋东部,进行以海流观测为主要目标的代号为“多边形”的大洋实验,从而获得了大量的海流资料。......
2023-11-29

机载激光测深系统目前测深能力一般在50 m左右,其测深精度在0.3 m左右。机载激光测深可作常规海道测量之用,这也是研制机载激光测深系统的始动力。同时,机载激光测深还能提高水下运动目标(如潜艇)的发现概率。在海洋工程中,机载激光测深还可以测定港口的淤积等。......
2023-11-29

卫星海洋遥感在海洋物理过程和海洋生态监测、海洋资源的开发、利用和管理中发挥着愈来愈重要的作用。海洋卫星遥感在海洋大范围调查中扮演着重要的角色,海洋卫星遥感系统包括遥感平台和遥感传感器、地面接收和预处理系统、海洋卫星资料的反演和信息管理、分析及应用系统。......
2023-11-29

在短基线定位系统的基础上,进一步缩短水听器阵列的距离,则形成超短基线定位系统。各水声定位系统声基线的长度见表2-1。表2-1各水声定位系统声基线的长度1.长基线定位系统长基线定位系统包括安装在船上的收发器和一系列位置已知的固定在海底的应答器,应答器之间的距离构成基线。......
2023-11-29

底质为基岩或粗碎屑沉积物,不宜采用柱状采样。深潜器可对海底进行观察取样。底质取样站位一般设置于沉积物发生变化处;在不同的水深、地貌沉积环境和底质类型条件下,根据取样目的按表14-1选用不同的取样设备,以保证所取样品符合试验要求。表14-1底质取样设备及土样级别......
2023-11-29
多波束声呐图像的成像原理如图5-6所示。图5-6多波束声呐图像的成像原理2.回波强度采样位置的确定扫测系统每测量一次形成一个断面,断面内的回波强度采样具有时序性,为了绘制声呐图像,声强必须从时间序列转化为横向距离序列。......
2023-11-29
相关推荐