双目视觉测量系统的标定主要是指摄像机内部参数标定后,确定视觉系统结构参数R和T。实际上,在双目视觉测量系统的标定方法中,是由标定靶标对两台摄像机同时进行摄像机摄像标定,以分别获得两台摄像机的内、外参数,从而不仅可以标定出摄像机的内部参数,还可以同时标定出双目视觉测量系统的机构参数。......
2023-11-24
事实上,利用视差的概念进行三维测量的思想可以用三角测量的原理进行说明。如图7.17所示,设P是空间中的一个物点,O和O′分别是左、右摄像机的光学中心。由几何知识可知,以P、O和O′三点为顶点可以构成一个三角形,它们确定空间中的一个平面π。若PLi和PiR分别为物点P在左、右图像平面上的投影像,则由透视投影的有关结论可知,物点P必定在左摄像机的光学中心的O和投影像PLi的连线OPLi上。同理可知,物点P必定在右摄像机的光学中心O′和投影像PRi的连线O′PiR上。这样,直线OPLi和O′PiR均在由P、O和O′三点确定的平面π上。由于处于空间中同一个平面上的两条非平行直线惟一地确定平面上的一点,因此物点P由上述两直线OPLi和O′PRi的交点给出。
上述基于双眼视差的测量方法在概念上非常简洁明快。只要能够确定一个物点在左、右图像平面上对应的像点位置,即可据此惟一地确定该物点的三维空间位置。问题在于怎样才能确定和左图像平面上的某个像点所对应的右图像平面上的某个像点呢?
由于噪声、光照变化、遮挡、透视畸变和目标之间本身的相似性等因素,导致空间同一点投影到两台摄像机的图像平面上形成的对应点的特性不同。对一幅图像中的一个特征点或一小块子图像,在另一幅图像中可能存在好几个相似或更多的候选匹配。因此,必须通过必要的信息或约束规则作为辅助判据,以便得到惟一准确的匹配。(www.chuimin.cn)
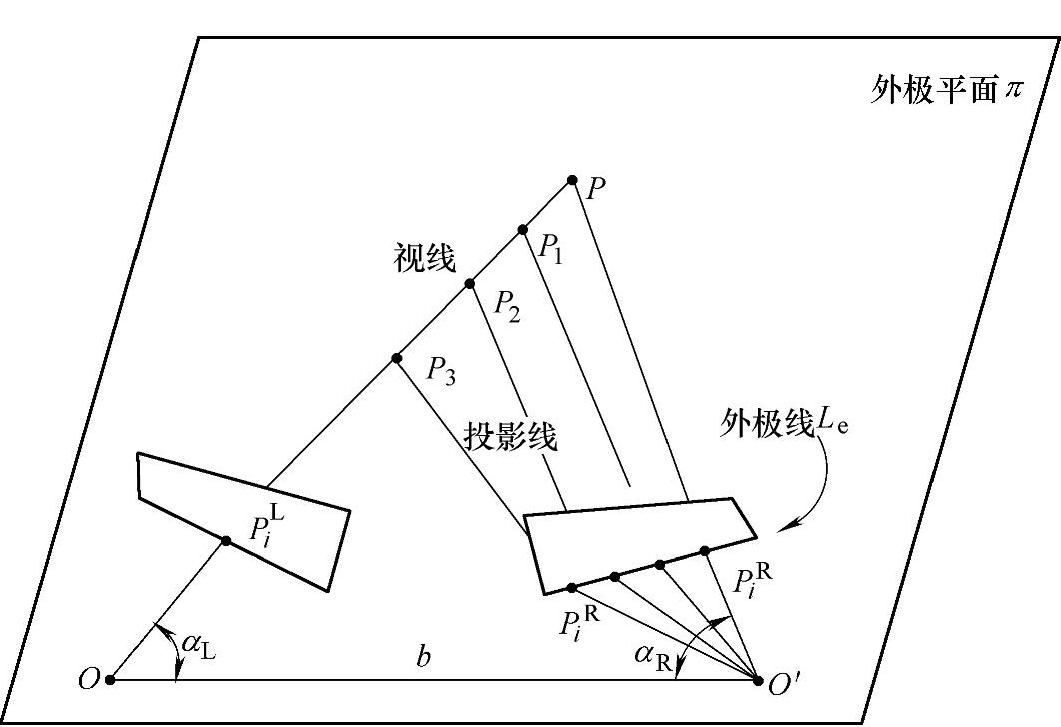
图7.17 双目视觉系统的基本几何约束
有关视觉测量技术的文章

双目视觉测量系统的标定主要是指摄像机内部参数标定后,确定视觉系统结构参数R和T。实际上,在双目视觉测量系统的标定方法中,是由标定靶标对两台摄像机同时进行摄像机摄像标定,以分别获得两台摄像机的内、外参数,从而不仅可以标定出摄像机的内部参数,还可以同时标定出双目视觉测量系统的机构参数。......
2023-11-24

如果摄像机事先移动的两个位置确定下来,该系统只需要一次标定,即可构成双目视觉测量系统。图7.12 摄像机移动构成双目视觉系统这种结构的特点如下:1)采用单摄像机,降低了系统的成本;根据摄像机移动位置的不同,很容易构成不同基线距的双目视觉测量系统,具有很大的灵活性。......
2023-11-24

单目视觉几何相似法测量是对应于被测对象的几何参数在同一平面内的情况,此时被测物面与摄像系统光轴垂直,并与像平面平行。几何相似法测量只是二维测量,主要有二维几何位置、形状、变形测量、位移和速度的测量等。......
2023-11-24

合理的反射镜长度设计是系统的最基本要求。设反射镜M2R的最短长度为lmin,在△OBC及△O2LCD中,由正弦定理有由式和式可得,反射镜M2R的最短长度为2.基线距离B的计算单摄像机虚拟立体视觉的基线距离是两个虚拟摄像机光学中心和之间的距离,因此基线距离为从式可以看出,基线距离由四个因素决定:光学反射镜的摆放角度α和β、摄像机光学中心的Z轴坐标d及M2R与X轴交点的坐标L。......
2023-11-24

单目视觉测量是指利用一台摄像机或数码相机拍摄图像进行测量工作。但由于标定精度弱和难以同时确定摄像机与被测物体之间的相对位置等问题,单目视觉的整体测量精度不如双目和多目视觉测量系统。单目视觉测量的理论基础和相关技术是双目测量乃至多目测量技术的基础。单目视觉测量能够满足某些应用场合实际测量的要求。基于单目视觉的测量方法主要包括几何相似法、光笔式三坐标测量法、几何形状约束法、几何光学法和结构光测量等。......
2023-11-24

最常见的成像变换是几何透视变换,其特点是随着三维场景与摄像机之间距离的变化,像平面上的投影也发生变化。假设摄像机理想成像,不存在非线性畸变,如图5.6所示。针孔模型主要由光心、成像面和光轴组成。图5.6 小孔成像模型......
2023-11-24
下面简要介绍Marr视觉理论的基本思想和框架。图1.1 Marr视觉信息处理的三个阶段第一阶段是早期视觉处理,其目的是从输入的原始图像中抽取观察者周围景物表面的物理特性,如距离、表面方向、材料特性等,并构成要素图或基元图。表1.2 由图像恢复形状信息的表达框架3.Marr视觉理论的意义及不足Marr视觉理论是计算机视觉研究领域的划时代成就。图1.2 改进后的Marr视觉理论框架限于历史等因素,Marr没有研究如何用数学方法严格地描述视觉信息的问题。......
2023-11-24

相关推荐