计算机视觉测量技术以图像传感器为手段检测空间物体的空间三维坐标,进而检测物体的尺寸、形状和运动状态等。美国、加拿大、日本等发达国家早在20世纪60年代后期就已经开始了计算机视觉测量技术的研究。直到20世纪90年代,随着计算机技术的发展成熟,计算机视觉测量技术逐渐成为一个研究热点。......
2025-09-30
在提取图像显著特征的基础上,特征匹配旨在建立这些稀疏特征之间的对应关系。不同的基于特征的匹配方法所选择的匹配基元各不相同。可以用作匹配基元的图像特征包括零交叉、直线段、曲线段、区域等。由于所使用的匹配基元各不相同,导致所使用的匹配准则不同。但是,特征匹配的方法只能得到相应基元特征处的景物深度值,为了重建可视表面还必须进行深度的内插操作。
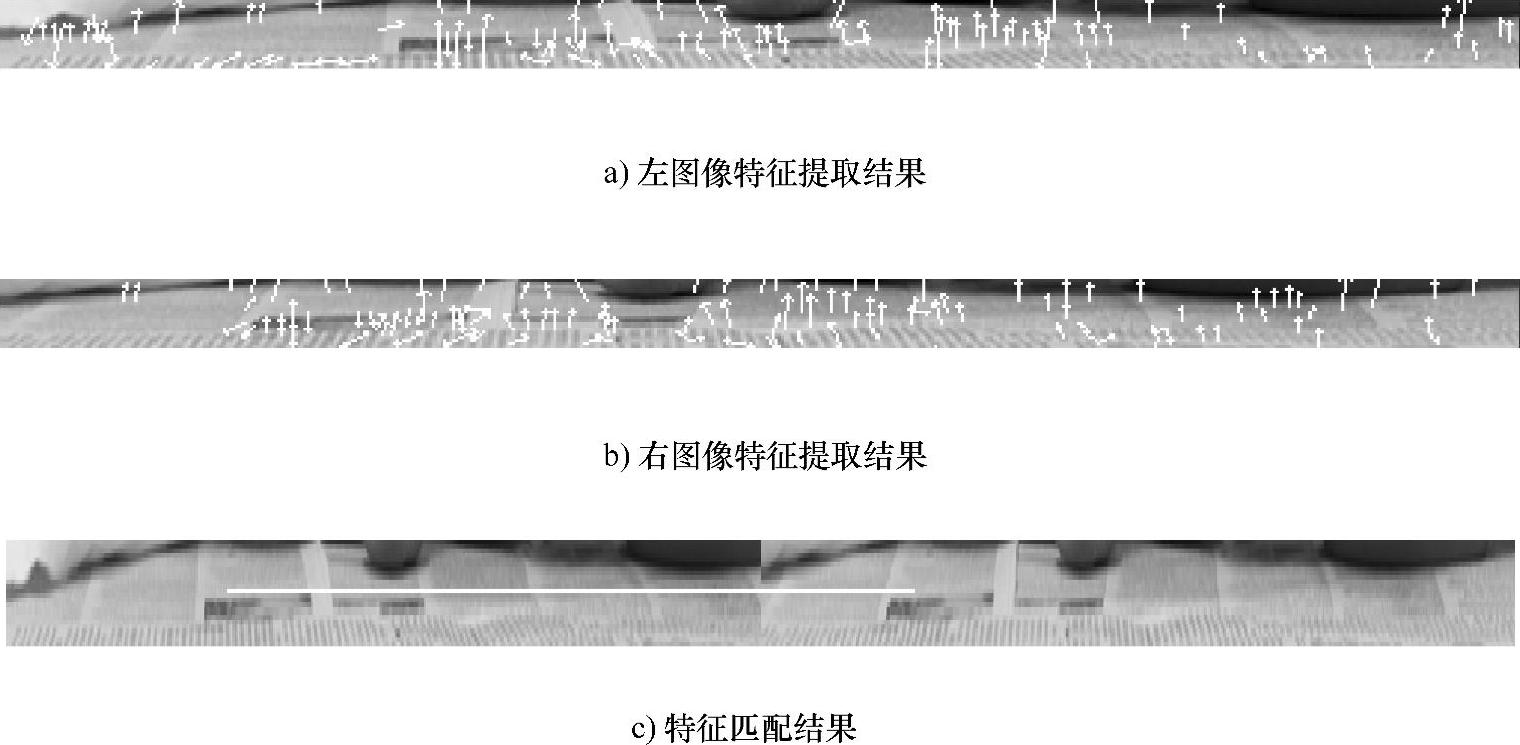
近几年,由于基于局部不变量的特征提取方法的进步,特征匹配逐渐以特征点匹配为主流。一方面,是得益于特征提取方法的进展,即使图像特征在不同图像存在比例缩放或仿射变换等现象时,特征点匹配方法也能实现两幅图像的可靠匹配。此性质对改善宽基线匹配结果特别有用。因为在宽基线情况下,由于图像视点变化比较大,使得同一场景在不同视点下的投影出现比较大的变化。特别是对一些斜面场景的图像对,这种情况更加严重。通常基于局部匹配的算法在此区域很容易造成误匹配。因此,这样就对特征提取的算法提出了较高要求,希望提取的特征能够具有光照、旋转、尺度和反射不变性。在现有的特征提取算法中,尺度不变特征变换(Scale Invariant Feature Transform,SIFT)算法由于其良好的性能得到了广泛应用。图7.16所示是对标准图像对,即Teddy图像中斜面场景,利用SIFT算法提取特征并进行匹配得到的结果。从图中可以看出,由于该斜面的视差相对较大,使得在左右图像中,对应点附近的图像变化较大,如果利用局部匹配算法的代价累积策略,将会造成误匹配。而利用SIFT算法进行特征匹配,则不会造成这一问题。
 (https://www.chuimin.cn)
(https://www.chuimin.cn)
图7.16 利用SIFT算法对Teddy图像中斜面场景进行特征提取和特征匹配的处理结果
相关文章

计算机视觉测量技术以图像传感器为手段检测空间物体的空间三维坐标,进而检测物体的尺寸、形状和运动状态等。美国、加拿大、日本等发达国家早在20世纪60年代后期就已经开始了计算机视觉测量技术的研究。直到20世纪90年代,随着计算机技术的发展成熟,计算机视觉测量技术逐渐成为一个研究热点。......
2025-09-30

单目视觉测量是指利用一台摄像机或数码相机拍摄图像进行测量工作。但由于标定精度弱和难以同时确定摄像机与被测物体之间的相对位置等问题,单目视觉的整体测量精度不如双目和多目视觉测量系统。单目视觉测量的理论基础和相关技术是双目测量乃至多目测量技术的基础。单目视觉测量能够满足某些应用场合实际测量的要求。基于单目视觉的测量方法主要包括几何相似法、光笔式三坐标测量法、几何形状约束法、几何光学法和结构光测量等。......
2025-09-30

下面简要介绍Marr视觉理论的基本思想和框架。图1.1 Marr视觉信息处理的三个阶段第一阶段是早期视觉处理,其目的是从输入的原始图像中抽取观察者周围景物表面的物理特性,如距离、表面方向、材料特性等,并构成要素图或基元图。表1.2 由图像恢复形状信息的表达框架3.Marr视觉理论的意义及不足Marr视觉理论是计算机视觉研究领域的划时代成就。图1.2 改进后的Marr视觉理论框架限于历史等因素,Marr没有研究如何用数学方法严格地描述视觉信息的问题。......
2025-09-30

直方图均衡化方法的优点是能自动增强整个图像的对比度,处理的结果是得到全局均衡化的直方图。这种增强的方法称为直方图规定化方法。直方图规定化方法的基本原理与直方图均衡化方法非常类似,两者的不同主要在于变换函数的选取上。在实际应用中,直方图规定化方法的难点也恰恰在于如何恰当地选取有意义的特定直方图。可见,单映射规则的映射方向是将原始累积直方图中的各项映射成规定的累积直方图的各项。 直方图规定化计算示例。......
2025-09-30

图4.10 边缘模型边缘检测是基于边界分割方法的最基本处理。实际边缘模型是如图4.10b所示的水平剖面图,称为斜坡边缘。斜坡部分与边缘的模糊程度成比例。阶跃型边缘处于图像中两个具有不同灰度值的相邻区域之间,其灰度变化曲线的一阶导数在边缘处出现极值,而二阶导数在边缘处出现零交叉。脉冲型边缘主要对应于细条状的灰度值突变区域。边缘检测包含两个方面含义:1)检测边缘点或边缘线段。......
2025-09-30

在众多基于区域分裂与合并的图像分割算法中,基于四叉树的方法是最常用的一种方法。下面以一个图4.46所示例子来说明区域分裂-合并法的基本步骤。根据每个区域的方差值可知,区域R1和R3满足方差相似性条件,不需要进行分裂;R2和R4则不满足方差相似性条件,需要进行进一步分裂。图4.47 区域分裂与合并方法示意由于R2和R4已经分裂到最小单位,为单个像素,因此不再进行分裂。......
2025-09-30

成像系统的几何畸变误差是典型的系统误差,是影响光学测量精度的因素之一。选用高质量的镜头和进行镜头畸变校正可提高测量精度。......
2025-09-30

针对上述问题,满足现场测量需求的便携式三坐标测量系统及方法应运而生,并成为测量领域的研究热点之一。以单目或双目视觉测量技术为基础,结合三坐标测量机的工作模式,一种手持光笔式三坐标测量机应运而生。光笔式三坐标测量系统具有如下特点:测量功能强大光笔式三坐标测量能实时动态地给出测量范围以内三维空间任意被测点的三维坐标,是一个功能完整的三维坐标测量系统。......
2025-09-30
相关推荐