双目视觉测量系统的标定主要是指摄像机内部参数标定后,确定视觉系统结构参数R和T。实际上,在双目视觉测量系统的标定方法中,是由标定靶标对两台摄像机同时进行摄像机摄像标定,以分别获得两台摄像机的内、外参数,从而不仅可以标定出摄像机的内部参数,还可以同时标定出双目视觉测量系统的机构参数。......
2023-11-24
1.摄像机移动,构成双目视觉系统
保持目标物不动的移动摄像机法,是近景摄影测量中常用的方法。测量中绝大多数目标物不能移动或不宜移动。
如图7.12所示,当摄像机位于位置1和位置2时,分别采集包含物体特征点的图像。两幅图像可以组成正直摄影立体像对,这时摄像机位置的变动应保持基本平移性质,即摄像机仅仅沿着x方向移动,沿其他方向没有移动和转动。系统的基线距B与摄像机的移动距离相关。如果摄像机事先移动的两个位置确定下来,该系统只需要一次标定,即可构成双目视觉测量系统。两幅图像也可组成交向摄影立体像对,这时摄像机位置的变动是移动加转动,摄像机需要重新标定。
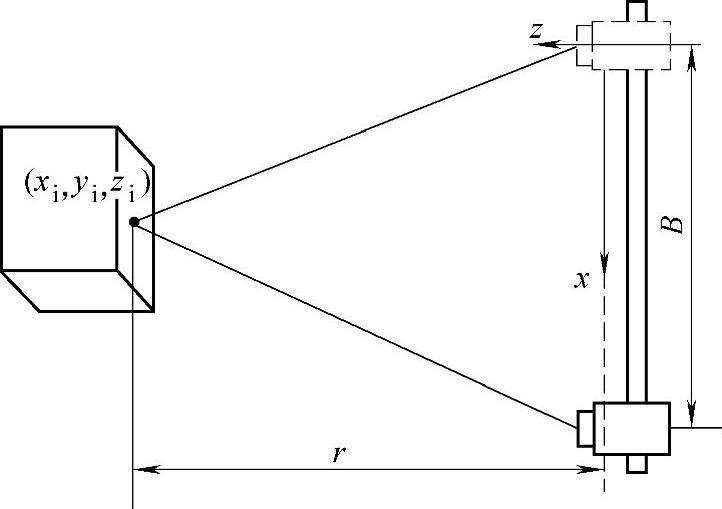
图7.12 摄像机移动构成双目视觉系统
这种结构的特点如下:
1)采用单摄像机,降低了系统的成本;根据摄像机移动位置的不同,很容易构成不同基线距的双目视觉测量系统,具有很大的灵活性。
2)这种结构对摄像机的移动位置要求较高,尤其是移动的固定位置。(www.chuimin.cn)
3)因为摄像机在两个位置的固定是在测量过程中进行的,因此测量速度不可能很快。对于要求在线测量的应用场合,这种结构显然不能满足要求。
2.摄像机固定,被摄物移动构成双目视觉系统
即保持摄像机不动,移动被测目标。如图7.13所示,自摄站S对目标M拍摄一张图像P1后,保持摄像机S不变,将被摄物M从位置M1平移至M2,再拍摄另一图像P2,以组成立体像对(P1,P2)。

图7.13 移动被摄物体法获取立体像对
被摄物M的平移距离B相当于摄影基线。在近景摄影测量的立体摄影中,当移动目标较移动摄像机更为方便时,常采用此方法。如工厂传送带上对部件进行质量控制是一种典型例子,可方便地对传送带上不断平移过来的众多部件一一进行立体摄像。
有关视觉测量技术的文章

双目视觉测量系统的标定主要是指摄像机内部参数标定后,确定视觉系统结构参数R和T。实际上,在双目视觉测量系统的标定方法中,是由标定靶标对两台摄像机同时进行摄像机摄像标定,以分别获得两台摄像机的内、外参数,从而不仅可以标定出摄像机的内部参数,还可以同时标定出双目视觉测量系统的机构参数。......
2023-11-24

图6.3所示为镜像式的虚拟立体视觉结构。并由光路反射可以确定虚拟摄像机的摆放角为由式(6.8)和式(6.9)即可确定模拟双目视觉传感器左、右虚拟摄像机的坐标和摆放角度。并由式(6.9)可推出反射镜M2L与M2R的摆放角度β必须不小于反射镜M1L与M1R的摆放角度α。......
2023-11-24

如图7.17所示,设P是空间中的一个物点,O和O′分别是左、右摄像机的光学中心。由几何知识可知,以P、O和O′三点为顶点可以构成一个三角形,它们确定空间中的一个平面π。由于处于空间中同一个平面上的两条非平行直线惟一地确定平面上的一点,因此物点P由上述两直线OPLi和O′PRi的交点给出。因此,必须通过必要的信息或约束规则作为辅助判据,以便得到惟一准确的匹配。图7.17 双目视觉系统的基本几何约束......
2023-11-24

图5.11 世界坐标系与摄像机坐标系不重 合时的投影成像2.世界坐标系与摄像机坐标分开时的摄像机模型考虑更一般的情况,即摄像机坐标系和世界坐标系分开的情况,但仍将平面xy和像平面x′y′重合。图5.11所示为这种情况下的摄像机几何模型,像平面中心(原点)与世界坐标系的位置偏差记为矢量D,其分量为Dx、Dy、Dz。图5.12所示为考虑这些因素时的通用摄像机模型示意图。......
2023-11-24
多数情况下,这些参数必须通过实验与计算才能得到,这个过程称为摄像机的标定。摄像机标定一般分为经典标定方法和自标定方法。当前对传统摄像机标定技术的研究集中在非线性畸变校正。自标定方法不依赖于标定参照物,仅利用摄像机在运动过程中周围环境的图像与图像之间的对应关系对摄像机进行标定。图5.1 摄像机标定系统图5.2 标定靶标的控制点类型......
2023-11-24

固态摄像机具有以下明显特点:1)全固体化、体积小、重量轻、不受电磁现象干扰。图2.29 固态摄像机一般结构组成1—物镜 2—红外滤光片 3—漫射镜片 4—玻璃保护片 5—传感器芯片 6—陶瓷衬底 7—插接件 8—电子部分 9—电源 10—信号黑白电视制式1)RS-170制式,属NTSC制式,主要应用在南美洲、北美洲和日本,场频率为60Hz,行频率为15750Hz,525行,隔行扫描方式。......
2023-11-24

合理的反射镜长度设计是系统的最基本要求。设反射镜M2R的最短长度为lmin,在△OBC及△O2LCD中,由正弦定理有由式和式可得,反射镜M2R的最短长度为2.基线距离B的计算单摄像机虚拟立体视觉的基线距离是两个虚拟摄像机光学中心和之间的距离,因此基线距离为从式可以看出,基线距离由四个因素决定:光学反射镜的摆放角度α和β、摄像机光学中心的Z轴坐标d及M2R与X轴交点的坐标L。......
2023-11-24

相关推荐