
计算机视觉测量系统是计算机视觉技术在测量领域中的延伸,因此两者的结构基本相同。图1.8 典型的视觉测量系统......
2025-09-30
最常见的成像变换是几何透视变换,其特点是随着三维(3D)场景与摄像机之间距离的变化,像平面上的投影也发生变化。
1.成像坐标系统
为了描述空间一点与其在像平面上的投影之间的相互关系,即阐述摄像机模型和摄像机标定方法,需定义相关坐标系。以摄像机成像系统定义如下坐标系。
(1)世界坐标系
它也称真实或现实世界坐标系统XYZ,它是客观世界的绝对坐标系,也是物方坐标系。一般三维场景都用这个坐标系来表示。
(2)摄像机坐标系统
它是以摄像机为中心制定的坐标系统,即xyz。一般常取摄像机光学中心为原点,摄像机光学轴为z轴。
(3)像平面坐标系统
在摄像机内所形成的像平面坐标系统x′y′。一般常取像平面与摄像机坐标系的xy平面平行,且与x轴与x′轴,y与y′轴分别重合。这样像平面原点就在摄像机的光学轴上。
(4)计算机图像坐标系统(https://www.chuimin.cn)
计算机内部数字图像所用的坐标系统MN。数字图像最终由计算机内部的存储器保存,所以要将像平面的投影坐标转换到计算机图像坐标系统中。
2.小孔成像模型
三维空间中物体到像平面的投影关系即为成像模型,如图5.5所示,采用透镜成像描述摄像机成像原理,设物距为u,透镜焦距为f,像距为v,根据几何光学的高斯成像定理,物距u、焦距和像距v三者之间满足如下关系:

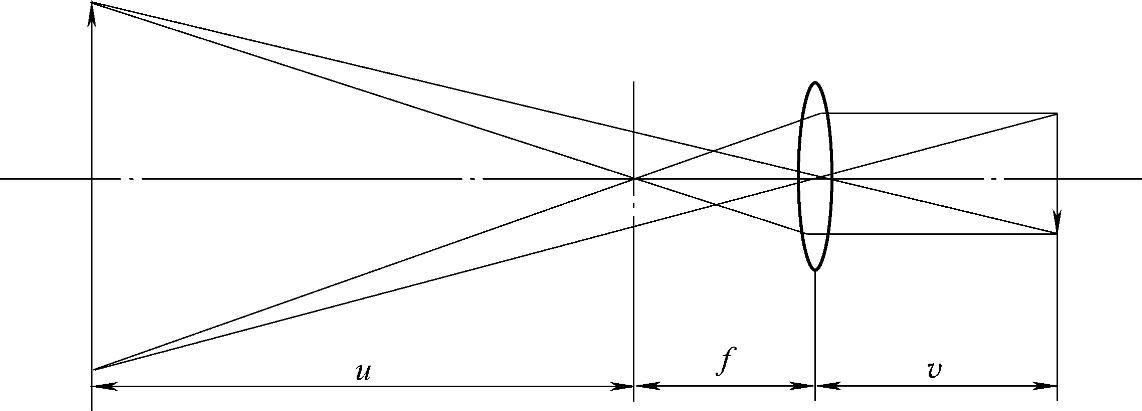
图5.5 透镜成像原理
一般情况下,u>>f,所以v≈f,即像距与焦距相近。在实际应用中,小孔成像模型是计算机视觉中广泛采用的理想的投影成像模型,也称针孔模型。假设摄像机理想成像,不存在非线性畸变,如图5.6所示。物体表面的反射光线都经过一个小孔而投影到像平面上,满足光的直线传播条件。景物点、针孔、景物点成的像在一条直线上,就像光线经过光学中心的一个小孔一样,故称小孔成像模型。景物点与针孔的连线与像平面的交点即为成像点。为方便起见,通常认为图像平面在针孔前面,即虚拟图像的位置。针孔模型主要由光心、成像面和光轴组成。
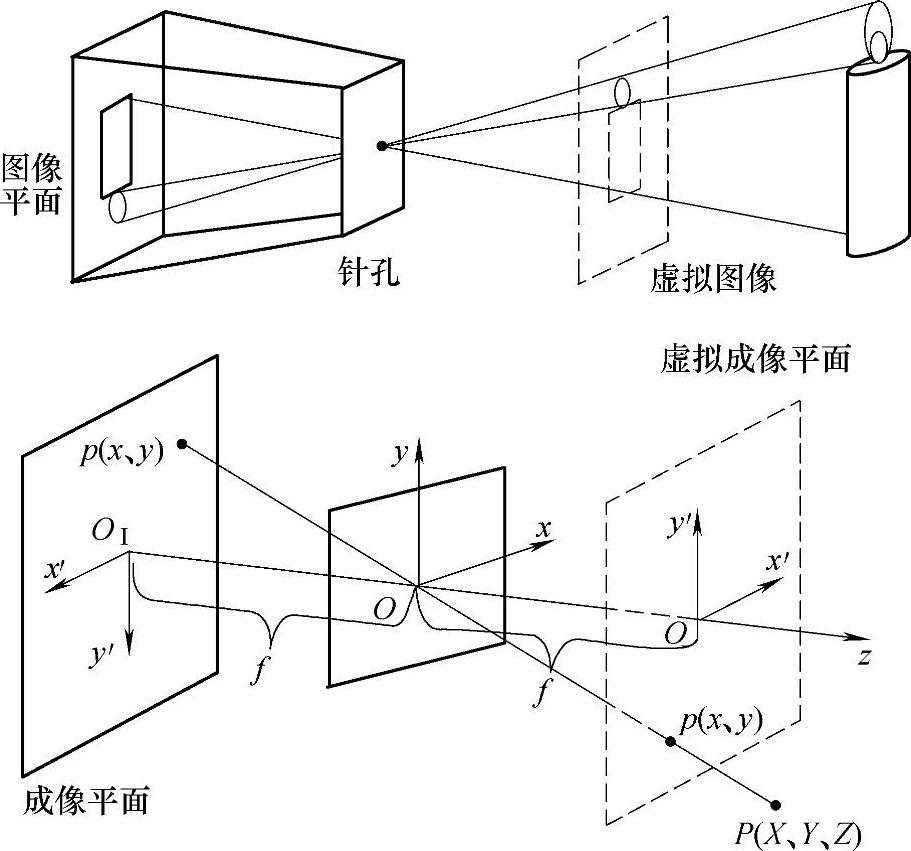
图5.6 小孔成像模型
相关文章

对所有M个u值重复这一过程,可以获得完整的离散傅里叶变换。用离散傅里叶变换可求出与M个采样点对应的M个频域点。若已知F,则可以利用离散傅里叶反变换得到原函数f,即式和式共同构成一个离散傅里叶变换对。图3.8 简单的M个点离散函数f及其一维离散傅里叶变换幅度谱......
2025-09-30

图4.10 边缘模型边缘检测是基于边界分割方法的最基本处理。实际边缘模型是如图4.10b所示的水平剖面图,称为斜坡边缘。斜坡部分与边缘的模糊程度成比例。阶跃型边缘处于图像中两个具有不同灰度值的相邻区域之间,其灰度变化曲线的一阶导数在边缘处出现极值,而二阶导数在边缘处出现零交叉。脉冲型边缘主要对应于细条状的灰度值突变区域。边缘检测包含两个方面含义:1)检测边缘点或边缘线段。......
2025-09-30

计算机视觉测量技术以图像传感器为手段检测空间物体的空间三维坐标,进而检测物体的尺寸、形状和运动状态等。美国、加拿大、日本等发达国家早在20世纪60年代后期就已经开始了计算机视觉测量技术的研究。直到20世纪90年代,随着计算机技术的发展成熟,计算机视觉测量技术逐渐成为一个研究热点。......
2025-09-30

总之,利用CCD的光电转换功能及光学成像系统,就构成了CCD图像传感器或CCD摄像机。CCD在某一时刻所获得的光电荷与前期所产生的光电荷累加,称为电荷积分。正面照射时光注入示意图如图2.35所示,CCD器件的光敏单元为光注入方式。该线性关系是应用CCD检测光谱强度进行多通道光谱分析成像的理论基础。图2.36 CCD单元阵列结构示意图在这种P型硅衬底中,多数载流子是空穴,少数载流子是电子。图2.38为三相CCD中的4个彼此相邻的电极的情况。......
2025-09-30
下面简要介绍Marr视觉理论的基本思想和框架。图1.1 Marr视觉信息处理的三个阶段第一阶段是早期视觉处理,其目的是从输入的原始图像中抽取观察者周围景物表面的物理特性,如距离、表面方向、材料特性等,并构成要素图或基元图。表1.2 由图像恢复形状信息的表达框架3.Marr视觉理论的意义及不足Marr视觉理论是计算机视觉研究领域的划时代成就。图1.2 改进后的Marr视觉理论框架限于历史等因素,Marr没有研究如何用数学方法严格地描述视觉信息的问题。......
2025-09-30
线性空间域滤波借助模板与图像进行卷积并在邻域操作。图3.5a所示为一个3×3的均值滤波器,将其应用于图3.4a的子图像,其滤波结果为对于与图3.3b所示模板对应的像素区域,采用图3.5a所示的滤波器进行滤波,其结果为均值滤波器减小了图像灰度的“尖锐”变化。非线性空间域滤波器能够较好地处理椒盐噪声、脉冲噪声和孤立噪声点。 中值滤波器的使用图3.6所示是利用3×3的模板进行中值滤波的示例。......
2025-09-30

边缘连接包含两方面含义:1)剔除噪声点,保留真正的边缘点。2)填补边缘空白点。最终的轮廓如图4.27d所示。上述边界跟踪法过程比较简单,适用于图像边缘连接明确的情况。......
2025-09-30
相关推荐