在扫描过程中,如果发现某个像素的灰度值由0变为1且没有分配标记,则给该像素分配一个没有使用的标记;如果当前正被扫描的像素值为1,则根据其与邻域像素的连通性对其进行标记;如果当前像素与多个目标相连通,则可以认为这些目标实际上是同一个,并把它们连接起来。......
2023-11-24
区域生长过程是从一组生长点开始,通过不断合并新区域或像素来完成整个分割过程。与此相反,区域分裂与合并法的基本原理是,首先将图像分割成若干个任意不相交的区域,然后计算每个子区域的属性。当属性表明该区域包含不同属性的像素时,则将该区域再分割成若干个子块;如果几个子区域的属性相似,则把他们合并成一个大的区域。
在众多基于区域分裂与合并的图像分割算法中,基于四叉树的方法是最常用的一种方法。其基本思想是,把原始图像作为树根或零层,将该图像分成4个子块,作为被分裂的第一层。对第一层的每个子块,若像素属性极其相似或一致,则该子块不再等分;如果某个子块的像素属性不一致或相差较大,则该子块必须分裂成相等的4个更小的子块作为第二层,依次循环直到所有的子块都不能再分裂为止。此外,在每层分裂的过程中,如果在不需要分裂的几个子块中,有几个子块的性质相似或一致,则将这些子块合并。最后,再次考察各层子块之间的关系,把相似性大的子块进行合并。
下面以一个图4.46所示例子来说明区域分裂-合并法的基本步骤。
1)首先,将原图分类成图4.46a所示的4个子块:R1、R2、R3和R4。计算这些区域的属性值,例如图像子区域的灰度均值与方差。
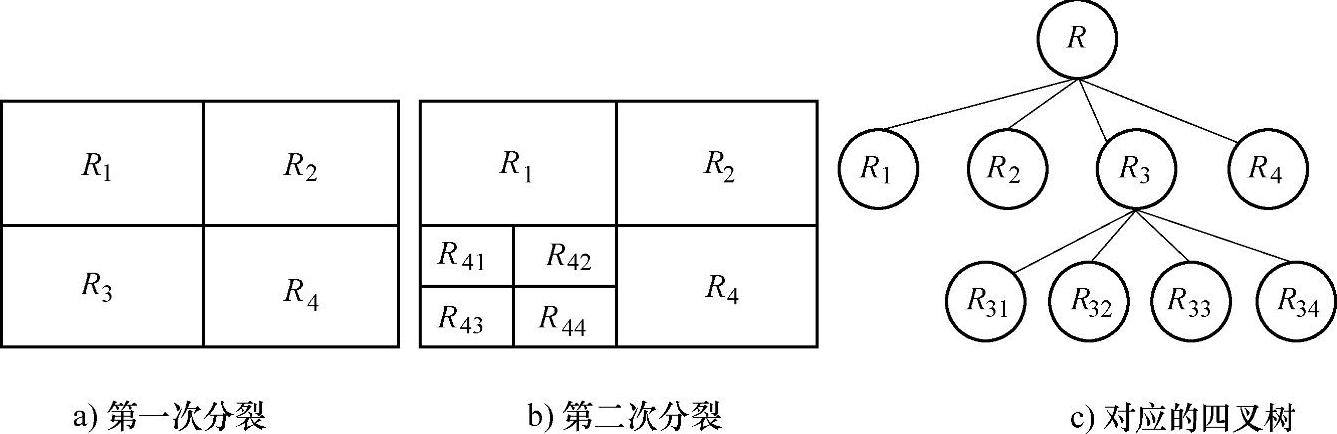
图4.46 区域分裂-合并法的基本步骤
2)如果某个子区域的属性值超出设定的阈值,则对该子块进行分裂。例如,假设区域R3的方差大于设定的方差阈值,则表明该子块包含多个区域的内容,则对R3进行分裂,如图4.46b所示。
3)如果某个区域的属性值在设定的阈值内,如方差小于设定的阈值,则表明该子区域的像素具有一致性,不再分裂。
4)对当前判断为不需要分裂的子块属性进行对比,如果相邻子块的属性值相似,例如灰度均值相似,则将两个子块进行合并。
5)重复上述过程,直到没有可合并、分裂的区域为止。
图4.46c给出了上述算法的四叉树数据结构。
【例4.13】 区域分裂与合并方法示意(www.chuimin.cn)
假设原图如图4.47a所示,子区域分裂的方差阈值为σTh=2,合并的灰度差阈值为μTh=5。
1)首先,将原始图像分裂成4个区域,如图4.47b所示。分别计算每一个子区域的灰度均值与方差,有
μ1=11.75,σ1=1.71
μ2=22.5,σ2=4.35
μ3=13.5,σ3=1.73
μ4=31.75,σ4=10.14
2)根据σ的值判断4个子区域是否需要进一步分裂。根据每个区域的方差值可知,区域R1和R3满足方差相似性条件,不需要进行分裂;R2和R4则不满足方差相似性条件,需要进行进一步分裂。具体情况如图4.47c所示。
3)根据灰度均值阈值进行合并,可见区域R1、R3R2分裂后的子区域R21可以进行合并,R22、R23、R24、R41和R43可以进行合并,而R42、R44可以进行合并。
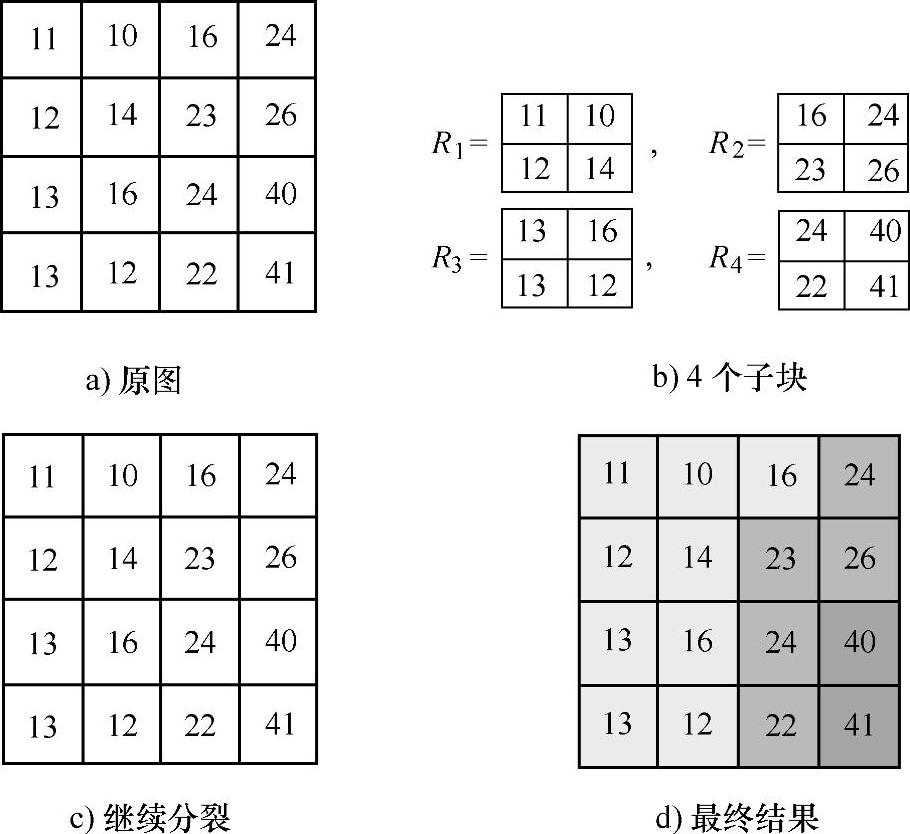
图4.47 区域分裂与合并方法示意
由于R2和R4已经分裂到最小单位,为单个像素,因此不再进行分裂。最终结果如图4.47d所示。
有关视觉测量技术的文章

在扫描过程中,如果发现某个像素的灰度值由0变为1且没有分配标记,则给该像素分配一个没有使用的标记;如果当前正被扫描的像素值为1,则根据其与邻域像素的连通性对其进行标记;如果当前像素与多个目标相连通,则可以认为这些目标实际上是同一个,并把它们连接起来。......
2023-11-24

混合型区域增长把图像分成若干个小区域,比较各个小区域的相似性,相似则合并。考察区域之间相似性的方法有多种,例如基于灰度差的区域增长法、基于灰度分布的区域增长法等。此外,对于式和式的两种相似性判决规则,由于Smoothed-Difference检测标准考虑了所有灰度值分布,因此比Kolmogorov-Smirnov检测要严格,其检测效果也要好些。......
2023-11-24

具体来说,计算机视觉测量系统的关键技术主要包括光源照明技术、图像处理与分析技术、摄像机标定技术、三维测量技术、图像拼接技术和三维重构技术等。而图像处理器的发展也为工业图像测量系统带来了新的机会和技术问题解决方案。......
2023-11-24
基于像素相似性的区域生长法是以图像中的某个像素为生长点,比较相邻像素的特征,将特征相似的相邻像素合并为同一区域,然后以合并的像素为生长点,继续合并,最终形成具有相似特征的像素的最大连通集合。下面介绍一种基于像素灰度差的区域生长法。2)将该像素周围的、不属于其他区域的邻域像素逐个与之比较,如果灰度值差小于预先确定的阈值,将它们合并。......
2023-11-24

单目视觉测量是指利用一台摄像机或数码相机拍摄图像进行测量工作。但由于标定精度弱和难以同时确定摄像机与被测物体之间的相对位置等问题,单目视觉的整体测量精度不如双目和多目视觉测量系统。单目视觉测量的理论基础和相关技术是双目测量乃至多目测量技术的基础。单目视觉测量能够满足某些应用场合实际测量的要求。基于单目视觉的测量方法主要包括几何相似法、光笔式三坐标测量法、几何形状约束法、几何光学法和结构光测量等。......
2023-11-24
成像系统的几何畸变误差是典型的系统误差,是影响光学测量精度的因素之一。选用高质量的镜头和进行镜头畸变校正可提高测量精度。......
2023-11-24

直方图均衡化方法的优点是能自动增强整个图像的对比度,处理的结果是得到全局均衡化的直方图。这种增强的方法称为直方图规定化方法。直方图规定化方法的基本原理与直方图均衡化方法非常类似,两者的不同主要在于变换函数的选取上。在实际应用中,直方图规定化方法的难点也恰恰在于如何恰当地选取有意义的特定直方图。可见,单映射规则的映射方向是将原始累积直方图中的各项映射成规定的累积直方图的各项。 直方图规定化计算示例。......
2023-11-24
相关推荐