基于像素相似性的区域生长法是以图像中的某个像素为生长点,比较相邻像素的特征,将特征相似的相邻像素合并为同一区域,然后以合并的像素为生长点,继续合并,最终形成具有相似特征的像素的最大连通集合。下面介绍一种基于像素灰度差的区域生长法。2)将该像素周围的、不属于其他区域的邻域像素逐个与之比较,如果灰度值差小于预先确定的阈值,将它们合并。......
2023-11-24
基于像素的简单区域生长的图像分割方法原理很简单,但是如果区域之间的特征变化很缓慢或两个区域的边缘交于一点时,两个区域就会合并起来。为了克服这一缺点,在上一小节的主要步骤2)中不是比较相邻像素的特征值,而是比较已存在区域的像素特征平均值与该区域邻接的像素的特征值。这种算法就是考察像素与相邻区域相似性的质心型区域生长法。下面仍以灰度值作为区域特征来分析质心型区域生长法。
假设当前小区域有N个像素,其区域标号均为l,则当前区域的平均灰度值为

假设f(i,j)为该小区域的一个相邻像素,且尚不属于任何区域,T为预先设定的灰度差阈值,C仍为小区域与f(i,j)的灰度差,即

那么质心型区域生长法的判别式仍然可以用式(4.70)表示。
基于质心型的区域生长方法的主要步骤与简单区域生长法极为类似,仅是增加了区域平均灰度值的计算,并将像素之间的相似性变为像素与区域之间的相似性,因此其基本步骤可以描述为
1)对图像进行逐行扫描,找出尚没有归属的像素。
2)以该像素所在区域的平均灰度值检查它的邻域像素,即将邻域中的像素逐个与之比较,如果灰度值差小于预先确定的阈值,将它们合并。
3)按照式(4.119)计算新区域的灰度平均值。
4)返回到步骤2),检查新区域的邻域,直到区域不能进一步扩张。
5)返回到步骤1),继续扫描直到不能发现没有归属的像素,则结束整个生长过程。
【例4.12】 质心型区域生长法的图像分割示例
仍以图4.46a给出的图像数据为例进行区域分隔,其他初始条件也均相同,阈值仍为T=5,起始种子点为f(0,0)=16,区域标志R(0,0)=A,考察相似性时仍然考察小区域的8连通邻域,区域标记为A,B,C,…
1)以第一个像素f(0,0)为种子起点,分别比较该像素与其邻域的灰度差,有
∣f(l,0)-f(0,0)∣=5<T,因此R(1,0)=A
∣f(0,1)-f(0,0)∣=4<T,因此R(1,0)=A
f(1,l)-f(0,0)∣=12-16=4<T,因此R(1,0)=A
检测结果如图4.45b所示。
2)计算合并后的区域平均灰度值

3)以f(0,0)所在区域A的平均灰度值M(A)检查它的邻域像素。此时小区域中有四个像素,小区域A的邻域中没有区域标记的像素有五个,即f(2,0),f(2,1),f(0,2),f(1,2),f(2,2)。判断这五个像素是否属于区域A,有
f(2,0)-M(A)∣=12.75-10=2.75<T,因此R(2,O)=A
∣f(1,2)-M(A)∣=14-12.75<T,因此R(1,2)=A
∣f(2,2)-M(A)∣=16-12.75<T,因此R(2,2)=A
∣f(2,1)-M(A)∣=13-12.75<T,因此R(2,1)=A
∣f(2,0)-M(A)∣=14-12.75<T,因此R(2,0)=A
检测结果如图4.45c所示。
4)新合并区域的灰度值为

5)以新合并的像素为中心,返回到步骤2),检查新像素集合的邻域,包括(3,0)、(3,1)、(3,2)、(0,3)、(1,3)、(2,3)、(3,3)这7个待考察的像素,有
|f(3,0)-M(A)|=16-13.1<T,因此R(3,0)=A
f(3,1)-M(A)∣=19-13.1>T,因此R(3,1)≠A
f(3,2)-M(A)∣=24-13.1<T,因此R(3,2)≠A
f(0,3)-M(A)∣=14-13.1<T,因此R(0,3)=A
f(1,3)-M(A)∣=17-13.1<T,因此R(1,3)=A
f(2,3)-M(A)∣=22-13.1>T,因此R(2,3)≠A(www.chuimin.cn)
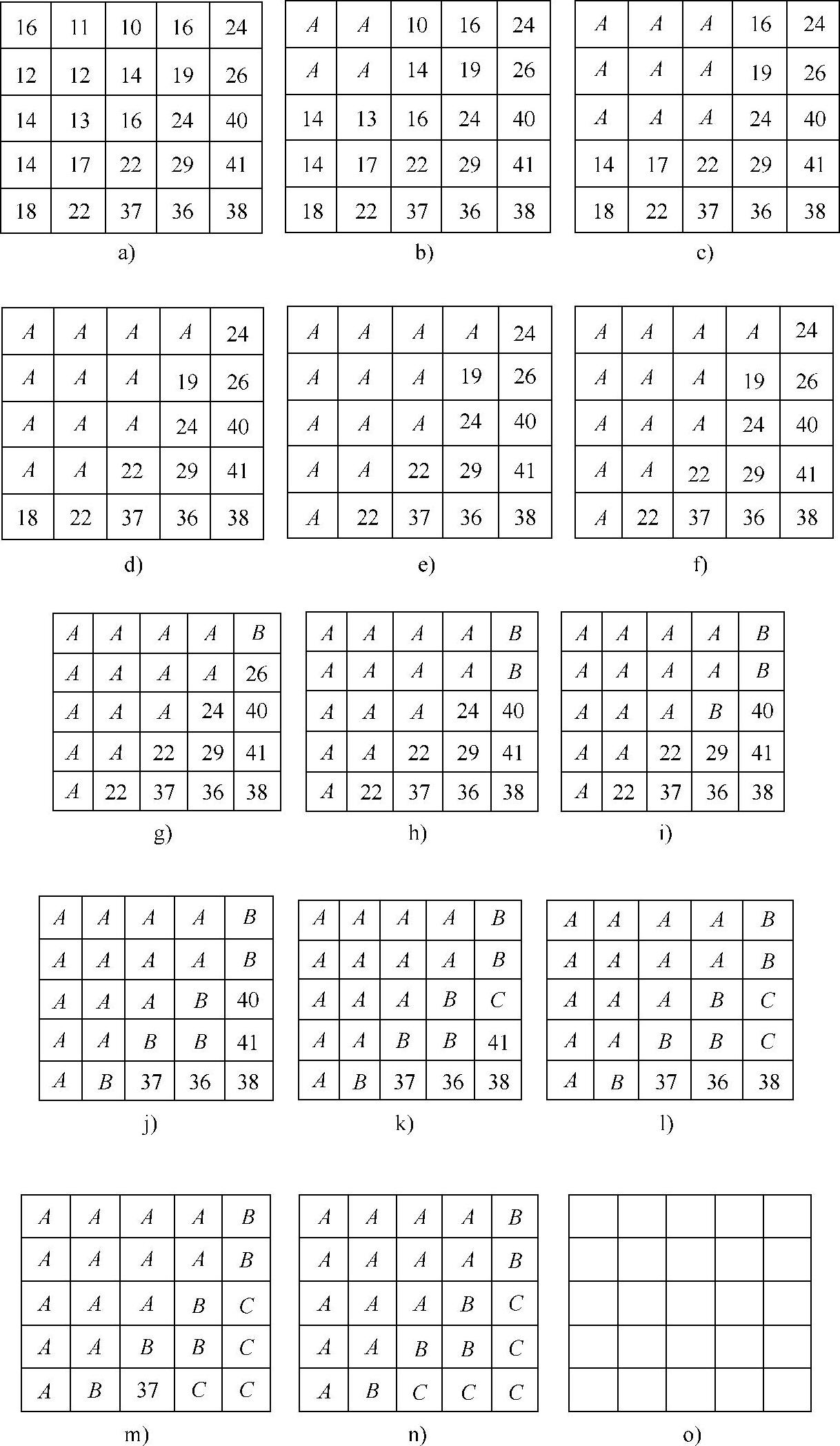
图4.45 质心型区域增长示例
|f(3,3)-M(A)|=29-13.1>T,因此R(3,3)≠A
检测结果如图4.45d所示。
6)计算新区域A的平均灰度值,有

7)返回步骤2),在新形成的区域A的邻域内再寻找是否满足要求的像素。在新形成区域的邻域像素(4,0)、(3,1)、(3,2)、(3,2)、(4,2)、(4,3)、(0,4)、(1,4)、(2,4)内,只有像素(0,4)满足预先规定的阈值差要求,即
|f(0,4)-M(A)|=18-13.75<T,因此R(0,4)=A检测结果如图4.45e所示。
8)计算此时区域A的均值,有

9)返回步骤2),在新形成的区域A的邻域内继续寻找满足要求的像素,只有像素(3,1)满足要求,即
|f(3,1)-M(A)|=19-14.1<T,因此R(3,1)=A检结果如图4.45f所示。
10)计算区域A的灰度均值,有

11)返回步骤2)继续考察区域A邻域内的各个像素,发现没有满足灰度差要求的像素,因此区域A不再增长。
12)返回到步骤1),继续扫描找到没有区域归属的像素(4,0),并赋予区域标记R(4,0)=B,如图4.45g所示。
13)以R(4,0)=B为种子点在其8连通邻域内寻找是否有满足合并要求的像素。由于f(4,1)的邻域内仅f(4,1)没有区域标记,因此仅需计算该像素与区域B的相似性,有
|f(4,1)-f(4,0)|=26-24<T,因此R(4,1)=B检测结果如图4.45h所示。
14)计算新区域B的平均灰度值,有

15)在新形成的区域B的邻域内继续扫描找到没有区域归属的像素,包括f(3,2)、f(4,2)两个像素,有
∣f(3,2)-M(B)∣=25-24<T,因此R(3,2)=B
∣f(4,2)-M(B)∣=40-25>T,因此R(4,2)≠B
检测结果如图4.45i所示。
16)计算新区域B的灰度平均值,有

17)同理,在新形成的区域B的邻域内[包括f(2,3)、f(3,3)和f(4,3)]继续扫描,直到区域B不再增长,其结果如图4.45j所示。
18)以像素f(4,2)为新的种子点,并赋予其区域标记R(4,2)=C,如图4.45k所示。
19)返回步骤2),继续进行区域C的增长,可以发现f(4,3)满足与区域C的灰度差要求,因此R(4,3)=C,检测结果如图4.45l所示。
20)计算新区域C的灰度均值,有
M(C)=(40+41)/2=40.5
21)返回步骤2),考察区域C的邻域像素f(3,4)和f(4,4),发现两者皆满足与区域C的灰度差要求,因此R(3,4)=C,R(4,4)=C。检测结果如图4.45m所示。
22)计算区域C的灰度均值,有
M(C)=(40+41+37+38)/4=39
23)返回步骤2),考察区域C的邻域像素f(2,4),发现该像素满足与区域C的灰度差要求,因此R(2,4)=C。检测结果如图4.45n所示。
有关视觉测量技术的文章

基于像素相似性的区域生长法是以图像中的某个像素为生长点,比较相邻像素的特征,将特征相似的相邻像素合并为同一区域,然后以合并的像素为生长点,继续合并,最终形成具有相似特征的像素的最大连通集合。下面介绍一种基于像素灰度差的区域生长法。2)将该像素周围的、不属于其他区域的邻域像素逐个与之比较,如果灰度值差小于预先确定的阈值,将它们合并。......
2023-11-24

在扫描过程中,如果发现某个像素的灰度值由0变为1且没有分配标记,则给该像素分配一个没有使用的标记;如果当前正被扫描的像素值为1,则根据其与邻域像素的连通性对其进行标记;如果当前像素与多个目标相连通,则可以认为这些目标实际上是同一个,并把它们连接起来。......
2023-11-24

混合型区域增长把图像分成若干个小区域,比较各个小区域的相似性,相似则合并。考察区域之间相似性的方法有多种,例如基于灰度差的区域增长法、基于灰度分布的区域增长法等。此外,对于式和式的两种相似性判决规则,由于Smoothed-Difference检测标准考虑了所有灰度值分布,因此比Kolmogorov-Smirnov检测要严格,其检测效果也要好些。......
2023-11-24

1988年kass等人提出的基于能量函数的活动轮廓模型,即Snake模型,便是一种典型的自由式变形模板模型。Snake模型是一种有效地寻找目标轮廓的搜索算法,具有良好的提取、跟踪特定区域内目标边缘的能力,工作过程主要是利用能量最小化原理。实现Snake模型原型的算法通常十分复杂,曲线收敛速度慢且搜索范围有一定限制,因此许多学者提出了不同的算法,对经典Snake模型进行了改进。......
2023-11-24

在众多基于区域分裂与合并的图像分割算法中,基于四叉树的方法是最常用的一种方法。下面以一个图4.46所示例子来说明区域分裂-合并法的基本步骤。根据每个区域的方差值可知,区域R1和R3满足方差相似性条件,不需要进行分裂;R2和R4则不满足方差相似性条件,需要进行进一步分裂。图4.47 区域分裂与合并方法示意由于R2和R4已经分裂到最小单位,为单个像素,因此不再进行分裂。......
2023-11-24

摄像机光学镜头是由透镜组成的。因此几何光学法测量可分为聚焦法和散焦法。而基于聚焦测距和散焦测距的几何光学法,可以克服上述对焦图像测量方法的缺点。其基本原理是利用在不同光学参数下得到的两幅或三幅图像来确定散焦点扩散函数的扩散参数,根据散焦扩散参数与物体距离的关系来计算深度,这种方法称为散焦测距。......
2023-11-24

借鉴人类视觉的原理,计算机视觉技术研究的长远目标是建立通用的视觉系统。计算机视觉技术的优势不仅在于能模拟人眼的功能,还能完成人眼所不能胜任的工作。因此,对人脑视觉的充分理解将促进对计算机视觉更深入的研究,并对计算机视觉系统提供坚实的生物理论基础。......
2023-11-24
相关推荐