白色背景下的黑色普通标志是视觉测量或近景数字摄影测量常用的人工标志。工业数字摄影测量使用彩色标志是利用光的相减混色法。图2.51 白色光照射红色标志示意图通过相减混色可以有效地对彩色标志进行识别,不足之处是丢失标志的空间分辨率。如图2.51所示,白光照射红色标志,红色标志吸收的青色,只有红色光返回,在图像中形成红色标志图像。......
2023-11-24
数字图像经过分割后得到多个目标区域,需要通过标记对它们进行区分。为此必须给不同的区域分配不同的标记。下面介绍一种实用的连同区域的标记算法——顺序标记法。
顺序标记法通常通过对图像进行从左到右、从上到下做两次扫描来实现标记。在扫描过程中,如果发现某个像素的灰度值由0变为1且没有分配标记,则给该像素分配一个没有使用的标记;如果当前正被扫描的像素值为1,则根据其与邻域像素的连通性对其进行标记;如果当前像素与多个目标相连通,则可以认为这些目标实际上是同一个,并把它们连接起来。下面以4-邻域连通的情况为例进行分析。
在对图像进行从左到右、从上到下的扫描过程中,如果发现当前像素的灰度值是0,就移动到一个扫描位置;如果当前像素的灰度值为1,检测该像素左边和上边的两个邻近像素,并按照如下规则进行标记:
1)如果该像素左边和上边的两个邻近像素的灰度值都是0,则给当前像素分配一个新的标记;
2)如果该像素左边和上边的两个邻近像素只有一个像素的灰度值为1,则把灰度值为1的像素的标记赋给当前像素;
3)如果该像素左边和上边的两个邻近像素的灰度值都是1且有相同的标记,则把该标记赋给当前像素;
4)如果该像素左边和上边的两个邻近像素的灰度值都是1且有不同的标记,则把其中一个标记赋给当前像素,并做个记号表明这两个标记等价,即两个近邻像素通过当前像素连接在一起。
扫描结束时,将所有等价的标记对赋予一个惟一标记,最后再重新进行扫描,将各个等价对重新用新标记进行标注。
对于8-邻域连通的情况,可采用类似的方式,区别仅是除了对当前像素的左边和右边的两个像素进行考察外,还需要对左上角和右上角的两个像素进行检查。
【例4.10】 顺序标记法应用实例
图4.42给出了一个输入图像分割后产生的二值图像f(x,y),按照上述顺序扫描算法对各个区域进行标记。
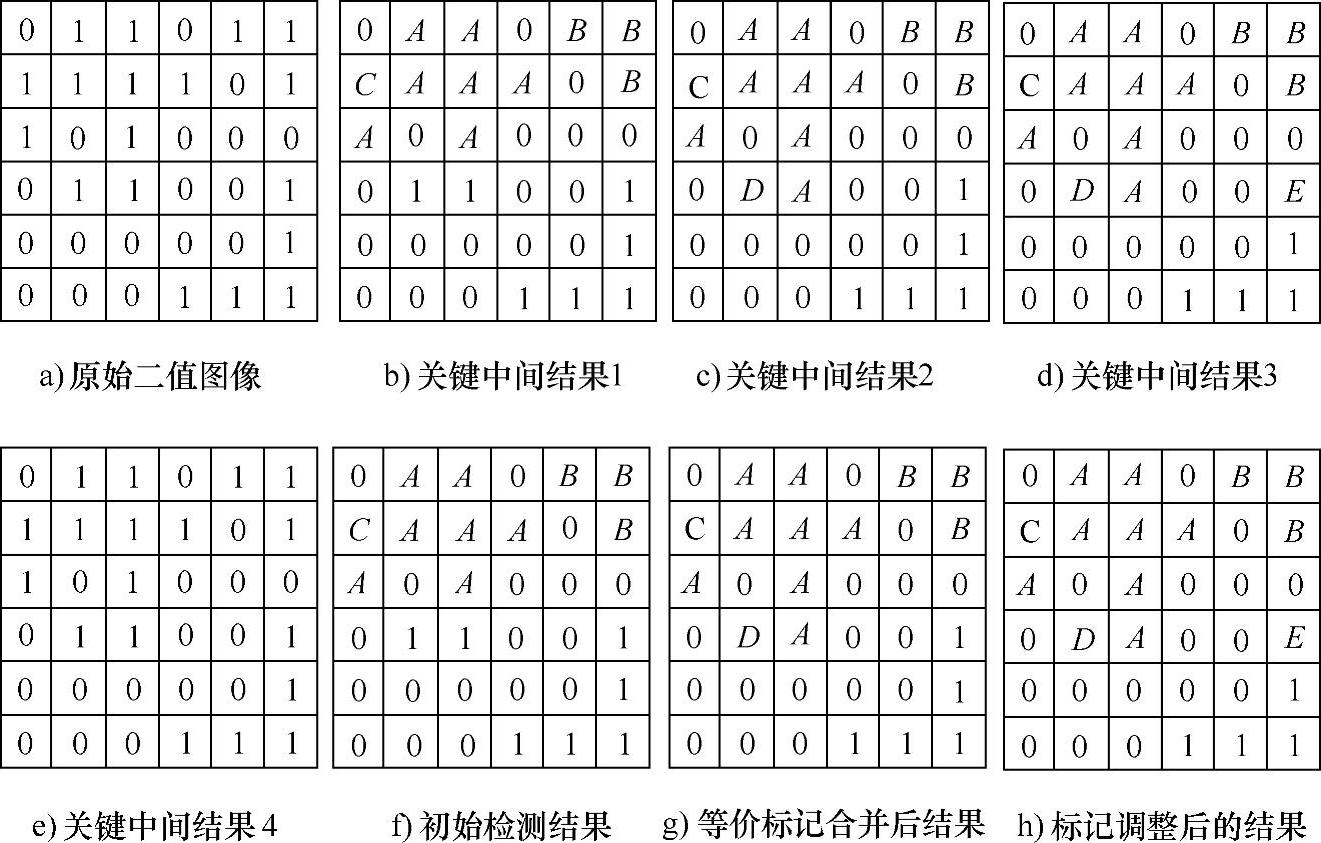
图4.42 4-邻域连通顺序标记法应用实例
1)按照从左到右、从上到下的顺序扫描,找到第一个数值为1的像素f(1,0),并赋予标记A。
2)继续扫描,找到第二个数值为1的像素f(2,0),并考察其4-邻域内像素的标记,由于其左边像素的标记为1,因此赋予像素f(2,0)标记A。
3)继续扫描,找到第三个数值为1的像素f(4,0),并考察其4-邻域内像素的标记,由于其左边像素的值为0,因此赋予像素f(4,0)新标记B。
4)继续扫描,找到第四个数值为1的像素f(5,0),并考察其4-邻域内像素的标记,由于其左边像素的值为0,因此赋予像素f(5,0)新标记B。
5)继续扫描,找到第五个数值为1的像素f(0,1),并考察其4-邻域内像素的标记,由于其上边像素的值为0,因此赋予像素f(0,1)新标记C。(www.chuimin.cn)
6)继续扫描,找到第六个数值为1的像素f(1,1),并考察其4-邻域内像素的标记,由于其上边、左边像素的值均为1,且标记不同,因此赋予像素f(1,1)标记A,同时得到A和C是等价对。
7)继续扫描,找到第七个数值为1的像素f(1,2),并考察其4-邻域内像素的标记,由于其上边、左边像素的值均为1,且标记均为A,因此赋予像素f(1,2)标记A。
8)继续扫描,找到第八个数值为1的像素f(1,3),并考察其4-邻域内像素的标记,由于其上边像素的值为0、左边像素的值为1,因此赋予像素f(1,3)标记A。
9)继续扫描,找到第九个数值为1的像素f(1,5),并考察其4-邻域内像素的标记,由于其上边像素的值为1、左边像素的值为0,因此赋予像素f(1,5)标记B。以次类推,可以完成像素f(5,2)之前所有像素的扫描,如图4.42b所示。
10)继续扫描,像素f(3,3)=1,考察其4-邻域内像素的标记,由于其上边、左边像素的值为0,因此赋予像素f(3,3)标记D,如图4.42c所示。
11)继续扫描,像素f(4,3)=1,考察其4-邻域内像素的标记,由于其上边、左边像素的值均为1,且标记不同,因此赋予像素f(4,3)标记A。同时,标记A和D是等价对,如图4.42c所示。
12)继续扫描,像素f(5,3)=1,考察其4-邻域内像素的标记,并赋予像素f(5,3)标记E,如图4.42d所示。
13)继续扫描,像素f(5,4)=1,考察其4-邻域内像素的标记,由于其上边像素的值为1且标记为E,因此赋予像素f(5,4)标记E,如图4.42e所示。
14)继续扫描,像素f(3,5)=1,考察其4-邻域内像素的标记,并赋予像素f(3,5)标记F,如图4.42e所示。
15)继续扫描,像素f(4,5)=1,考察其4-邻域内像素的标记,并赋予像素f(4,5)标记F,如图4.42f所示。
16)继续扫描,像素f(5,5)=1,考察其4-邻域内像素的标记,并赋予像素f(3,5)标记E,如图4.42f所示,并标记E和F是等价对。
17)全部像素扫描完毕后,将相应的等价对赋予惟一的标记,如图4.42g所示。
需要说明的是,在标记归并过程中,可能出现最终结果中标记不连续的现象。例如图4.42h中,仅有三个区域,但是标记却为{A,B,E}。这时还需要对最终结果进行调整,使标记号按顺序排列,例如{A,B,C}。例4.10中的图像标记调整后的最终结果如图4.42h所示。
图4.43给出了8-邻域连通的初始检测结果、等价对合并后的结果及最终的检测结果。在对像素f(3,2)进行扫描的过程中,可以发现标记A和标记B等价。因此经过等价标记的校正后,最终的结果如图4.43c所示。从图中可以看出,整个图像经过8-邻域顺序扫描后,得到两个区域。
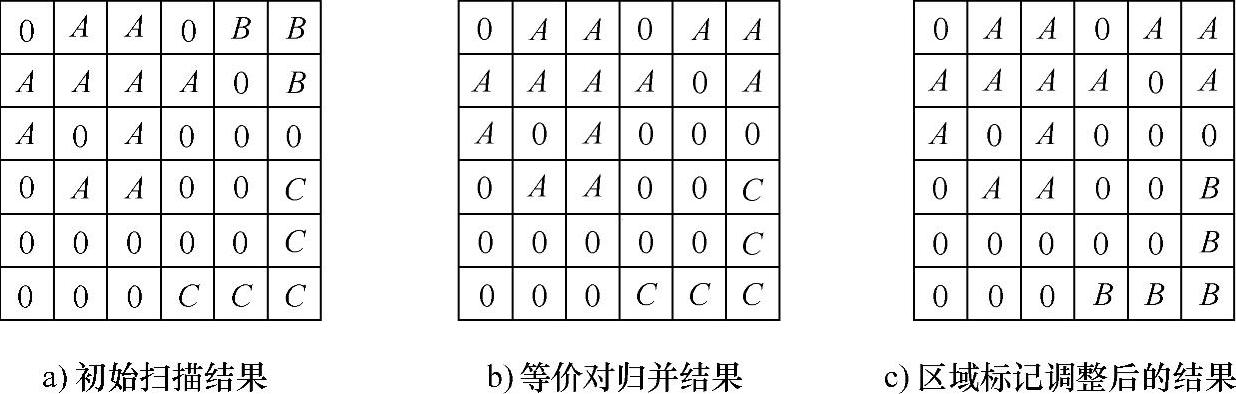
图4.43 8-邻域连通顺序扫描结果示意
有关视觉测量技术的文章

白色背景下的黑色普通标志是视觉测量或近景数字摄影测量常用的人工标志。工业数字摄影测量使用彩色标志是利用光的相减混色法。图2.51 白色光照射红色标志示意图通过相减混色可以有效地对彩色标志进行识别,不足之处是丢失标志的空间分辨率。如图2.51所示,白光照射红色标志,红色标志吸收的青色,只有红色光返回,在图像中形成红色标志图像。......
2023-11-24

计算机视觉测量技术以图像传感器为手段检测空间物体的空间三维坐标,进而检测物体的尺寸、形状和运动状态等。美国、加拿大、日本等发达国家早在20世纪60年代后期就已经开始了计算机视觉测量技术的研究。直到20世纪90年代,随着计算机技术的发展成熟,计算机视觉测量技术逐渐成为一个研究热点。......
2023-11-24

混合型区域增长把图像分成若干个小区域,比较各个小区域的相似性,相似则合并。考察区域之间相似性的方法有多种,例如基于灰度差的区域增长法、基于灰度分布的区域增长法等。此外,对于式和式的两种相似性判决规则,由于Smoothed-Difference检测标准考虑了所有灰度值分布,因此比Kolmogorov-Smirnov检测要严格,其检测效果也要好些。......
2023-11-24

在众多基于区域分裂与合并的图像分割算法中,基于四叉树的方法是最常用的一种方法。下面以一个图4.46所示例子来说明区域分裂-合并法的基本步骤。根据每个区域的方差值可知,区域R1和R3满足方差相似性条件,不需要进行分裂;R2和R4则不满足方差相似性条件,需要进行进一步分裂。图4.47 区域分裂与合并方法示意由于R2和R4已经分裂到最小单位,为单个像素,因此不再进行分裂。......
2023-11-24
基于像素相似性的区域生长法是以图像中的某个像素为生长点,比较相邻像素的特征,将特征相似的相邻像素合并为同一区域,然后以合并的像素为生长点,继续合并,最终形成具有相似特征的像素的最大连通集合。下面介绍一种基于像素灰度差的区域生长法。2)将该像素周围的、不属于其他区域的邻域像素逐个与之比较,如果灰度值差小于预先确定的阈值,将它们合并。......
2023-11-24

下面简要介绍Marr视觉理论的基本思想和框架。图1.1 Marr视觉信息处理的三个阶段第一阶段是早期视觉处理,其目的是从输入的原始图像中抽取观察者周围景物表面的物理特性,如距离、表面方向、材料特性等,并构成要素图或基元图。表1.2 由图像恢复形状信息的表达框架3.Marr视觉理论的意义及不足Marr视觉理论是计算机视觉研究领域的划时代成就。图1.2 改进后的Marr视觉理论框架限于历史等因素,Marr没有研究如何用数学方法严格地描述视觉信息的问题。......
2023-11-24
下面仍以灰度值作为区域特征来分析质心型区域生长法。假设当前小区域有N个像素,其区域标号均为l,则当前区域的平均灰度值为假设f(i,j)为该小区域的一个相邻像素,且尚不属于任何区域,T为预先设定的灰度差阈值,C仍为小区域与f(i,j)的灰度差,即那么质心型区域生长法的判别式仍然可以用式表示。......
2023-11-24

相关推荐