迭代过程一直进行到满足收敛判据为止,其中ε1、ε2为预先给定的小正数。牛顿—拉夫逊法的思想是微分学,它将求解非线性方程的问题转化成反复求解一组线性化的修正方程,并对变量进行修正的迭代过程。它同样存在初值选取问题,当初值选取离真解较远时,就失去牛顿—拉夫逊法的成立基础,将对收敛产生影响。......
2023-06-15
阈值分割最常用的图像模型:假设图像由多个区域组成,每个区域内部由灰度相同或相近的像素组成,而不同区域交界处的像素在灰度值上有较明显的差别。因此,可以通过设置合理的阈值,并比较各个像素与阈值的大小关系来区分不同的区域。由此可见,阈值分割算法主要包括以下两个步骤:
1)确定需要的分割阈值。
2)将分割阈值与像素值比较划分像素。
其中,确定阈值是分割的关键。如果能确定一个合适的阈值,即可方便地将图像分割开来。根据阈值的多少,阈值分割算法可以分为以下两种。
(1)单阈值
单阈值分割算法仅用一个阈值即可实现图像的分割,把图像分成目标与背景两大部分(如图4.36a所示,其中S0表示后景,S1表示前景)。其基本思想可以描述为,先确定一个处于图像灰度取值范围之中的灰度阈值,然后将图像中各个像素的灰度值与这个阈值进行比较,并根据比较结果将对应的像素(分割)划分为两类:像素灰度值大于阈值的为一类,像素灰度值小于阈值的为另一类,灰度值等于阈值的像素可以归属于任意一类。

图4.36 阈值分割图像模型示意
单阈值分割后的图像g(x,y)的表达式可以表示为

式中,T为阈值。可见g(x,y)是一幅二值图像。
(2)多阈值(www.chuimin.cn)
如果图像中有多个灰度值不同的区域(见图4.36b),那么可以选择用多个阈值把每个像素分到合适的类别中去。这种利用多个阈值实现的图像分割算法称为多阈值分割方法。一般情况下,n个阈值可实现n+1个区域的分割。假设图像中存在n+1个区域,每个区域均符合阈值分割的图像模型,此时分割后的图像可表示为
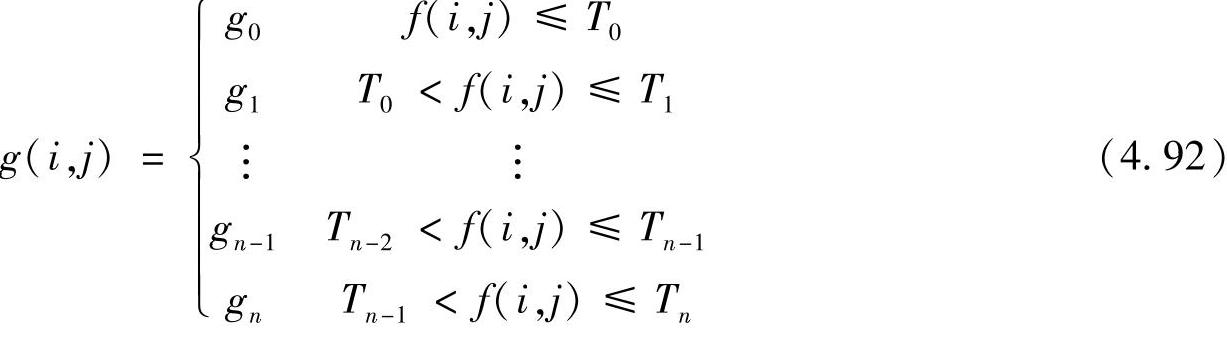
式中,T0,T1,…,Tn是一系列的分割阈值,且满足T0<T1<…<Tn-1<Tn;g0,g1,…,gn分别为处理后各个区域的输出值或某种标记。
无论单阈值分割还是多阈值分割,分割结果中都可能出现不同区域具有相同标号或区域值的情况。这是因为取阈值分割时,只考虑了像素本身的值,未考虑像素的空间位置。所以根据像素值划分到同一类的像素可能分属于图像中不相连通的区域,这往往需要借助一些对场景的先验知识来进一步确定目标区域。
假设f(x,y)代表像素点(x,y)处的灰度值,p(x,y)代表在该点邻域的某种局部性质,可以用下式来描述阈值分割过程:
T=T[x,y,f(x,y),p(x,y)] (4.93)即阈值的选取可能与像素位置、灰度值及当前像素的邻域性质等因素有关。根据阈值选取所依赖的相关因素,可以将阈值分割方法分为三类:
1)全局阈值 如果阈值T的选取仅取决于图像灰度值f(x,y),这种阈值就可以称为全局阈值。全局阈值法一般只使用一个阈值,经典的选取方法是基于图像的直方图来实现图像的分割。全局阈值法也称为点阈值法。常用的全局阈值法包括双峰法、p参数法、均匀性度量法、类间最大距离法、最大熵法、最大类间类内方差比法等。
2)局部阈值法 局部阈值法中阈值T的选取取决于图像灰度值f(x,y)和该点邻域的某些性质p(x,y)(如区域内各像素的值、相邻像素值的关系等)。这类阈值技术也被称为区域相关技术。局部阈值法将原始图像划分成较小的图像,并对每个子图像选取相应的阈值。在阈值分割后,相邻子图像之间的边界处可能产生灰度级不连续的情况,因此需要平滑技术进行排除。局部阈值法常用的方法包括灰度差直方图法、微分直方图法、灰度-局部灰度均值散布图法、二维熵法等。
3)自适应阈值法 阈值的选取除了与图像灰度值f(x,y)和该点邻域的某种局部特性p(x,y)有关外,还与像素的坐标位置(x,y)有关。这类阈值技术也称为动态阈值法或者自适应阈值法,常用的方法包括阈值插值法、水线阈值算法等。
总之,阈值的选取是国内外选择研究的热点之一。然而,到目前为止,还没有一种通用的对全部图像都适用的阈值选取方法,一般一种阈值选取方法只针对一类图像有效而对其他图像分割的效果就不是很理想。下面介绍几种基本的阈值选取算法。
有关视觉测量技术的文章

迭代过程一直进行到满足收敛判据为止,其中ε1、ε2为预先给定的小正数。牛顿—拉夫逊法的思想是微分学,它将求解非线性方程的问题转化成反复求解一组线性化的修正方程,并对变量进行修正的迭代过程。它同样存在初值选取问题,当初值选取离真解较远时,就失去牛顿—拉夫逊法的成立基础,将对收敛产生影响。......
2023-06-15

监控摄像头通常固定安装,并且力图监控更为宽广的视觉区域,视频背景基本不会发生变化,运动片段由运动目标的移入、移出,以及在监视区域内的运动形成的。在微小物体长时间运动后,像素累积变化会对分割结果造成影响。因此,视频运动片段的分割主要取决于运动目标移入和移出监控区域,而与目标在监控区域内的运动状态无关。......
2023-11-23

镜头的视觉内容通常不能完全用单个关键帧来表示。复合镜头可以包括多个较小的时间片段,将复合镜头分割成小的时间片段可以为用户提供直观的基于关键帧的浏览,而不会丢失镜头内片段的时间顺序。关键帧可以通过为这个镜头选择2组关键帧解决,一组描绘人物A,一组描绘人物B,这2组关键帧代表整个镜头。......
2023-11-23

灰色预测是建立一种以灰色模块为基础的描述系统动态变化特征的方法。灰色系统理论把原始数据经过累加生成的新数据序列,在几何意义上称为“模块”。很显然,时间就是指序列在时间、数据的二维平面上所做的连续曲线与其底部的总称,预测下限并将由已知数据列构成的模块称为白色模块;而由白色模块建模外推的未来模块,即预测值构成的模块,称为“灰色模块”,见图9.6。......
2023-06-30

(一) 基本原理链斗挖泥船至今已有200 多年的历史,是机械式挖泥船中最早的一种。链斗挖泥船一般在船体的首部或尾部中央开槽部位安装由斗桥、斗链和泥斗所组成的挖泥机具。为了适应某些特殊疏浚工程,链斗挖泥船有时可以根据需要加以改装。链斗挖泥船均采用可变速装置,使之在挖泥作业中改变不同的斗速和切削力,以适应挖掘各种不同土质。......
2023-06-29

半径r与z轴所夹的夹角为θ,当θ为常数时,在球形坐标系构成了两个面,一个是锥面,一个是球面。通过图1-2-2可知球坐标系中一点是由三个面两两垂直产生的。第三个单位矢量eφ与在圆柱坐标中eφ相同都是垂直于φ=常数的平面且与锥体和球体相切,方向指向东。如图1-2-2所示,三个单位矢量相互垂直且通过er×eθ=eφ来定义右手坐标系。......
2023-11-19


相关推荐