最小类内方差法也称为均匀性度量法。下面以两个区域为例来分析基于多次尝试的最小类内方差法。6)挑选最小类内方差所对应的阈值,即T*为可见最小方差法是一种自动阈值选择方法,整个过程不需要人工设定其他参数。......
2023-11-24
若以Δx为采样间隔,对连续函数f(x)进行等间隔采样,将得到N个离散的函数值{f(x0),f(x0+Δx),f(x0+2Δx),…,f(x0+(N-1)Δx))。其中,每一个函数值称为f(x)的一个样本。为了表示方便,表示为
f(x)=f(x0+xΔx) (3.16)
式中,x的取值为离散值0,1,…,N-1。

式中,j为虚数单位;u为频率变量。空间域f(x)经式(3.17)变换后所得到的空间称为函数的频域空间(简称频域)。为了计算F(u),首先在指数项中代入u=0,然后将所有x相加。接下来在指数项中代入u=1,重复对所有x相加。对所有M个u值重复这一过程,可以获得完整的离散傅里叶变换(Discrete Fourier Transform,DFT)。用离散傅里叶变换可求出与M个采样点对应的M个频域点。即u取值为-M/2~M/2,可以得到关于原点轴对称的频谱。如u取值范围为0~M,则取正方向频率。
若已知F(u),则可以利用离散傅里叶反变换得到原函数f(x),即

式(3.17)和式(3.18)共同构成一个离散傅里叶变换对。变量u有相似的解释,F(u)序列一般从0频率开始。因此,u值序列为{0,Δu,2Δu,…,[M-1]Δu}。F(u)理解为

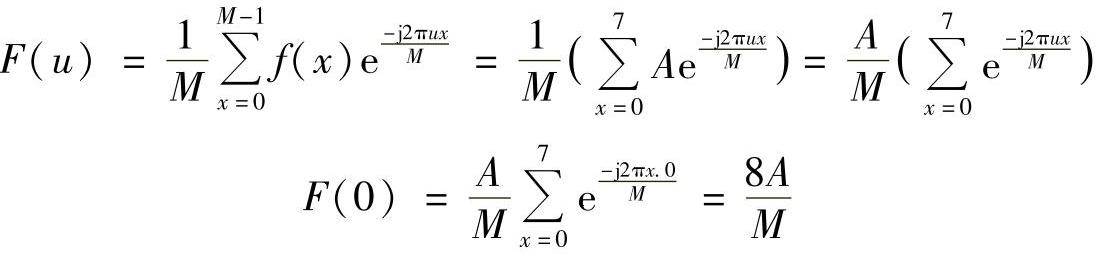
式中,u=0,1,…,M-1。变换前的1/M乘数有时放在反变换前。有时变换和反变换都乘以1/M。由傅里叶变换可得u=0的变换值为

可见F(0)是f(x)的平均值,因此F(0)有时被称作频率谱的直流成分。
在一维离散傅里叶变换中,时域的采样频率Δx和频域的采样频率Δu的关系为

一个实函数的一维离散傅里叶变换通常是复数,一维离散傅里叶变换可以用极坐标形式表示为
F(u)=Re(u)+iIm(u) (3.22)式中,Re(u)和Im(u)分别是F(u)的实部和虚部。利用欧拉关系可以将式(3.22)表示为极坐标形式,即
F(u)=|F(u)|ejϕ(u) (3.23)(www.chuimin.cn)
式中

其中,|F(u)|被称为傅里叶变换的幅度或幅度谱(简称为谱);|ϕ(u)|被称为傅里叶变换的相角或相位谱。幅度谱与相位谱统称为信号的频谱。谱的二次方被称为功率(功率谱,能量谱),其定义为
P(u)=F2(u)=R2(u)+I2(u) (3.26)
信号分析中的“谱密度”也是指功率谱。
【例3.5】 傅里叶变换实例
图3.8给出了一个M个点离散函数f(x)及其一维离散傅里叶变换幅度谱。图3.8a所示的离散信号的非0点个数为K,图3.8b显示了其傅里叶变换的幅度谱|F(u)|;图3.8c所示的离散信号的非0点个数为2K,图3.8d显示其相应的一维离散傅里叶变换的幅度谱|F(u)|。
对于图3.8a所示的函数,其傅里叶变换为
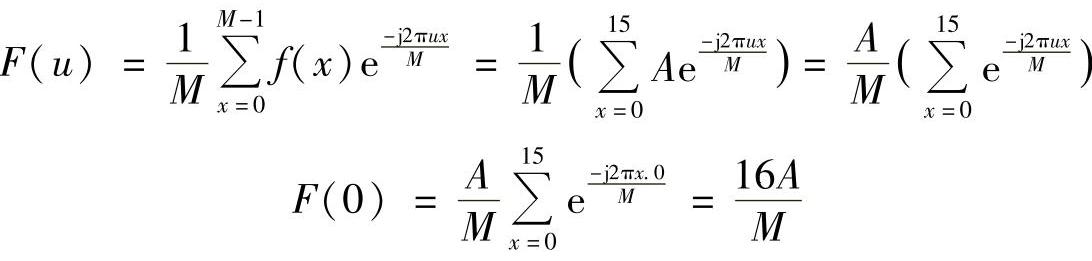
对于图3.8c所示的函数,其傅里叶变换为
从这两个信号的幅度谱可以看出:
1)当函数曲线下的面积在x域加倍时,傅里叶变换幅度谱的高度加倍。
2)当函数的长度加倍时,相同间隔下幅度为0的频率点数量加倍。
需要说明的是,如果离散信号f(x)在变换前被乘以(-1)x,则频率谱的中心将被移动到u=M/2处。
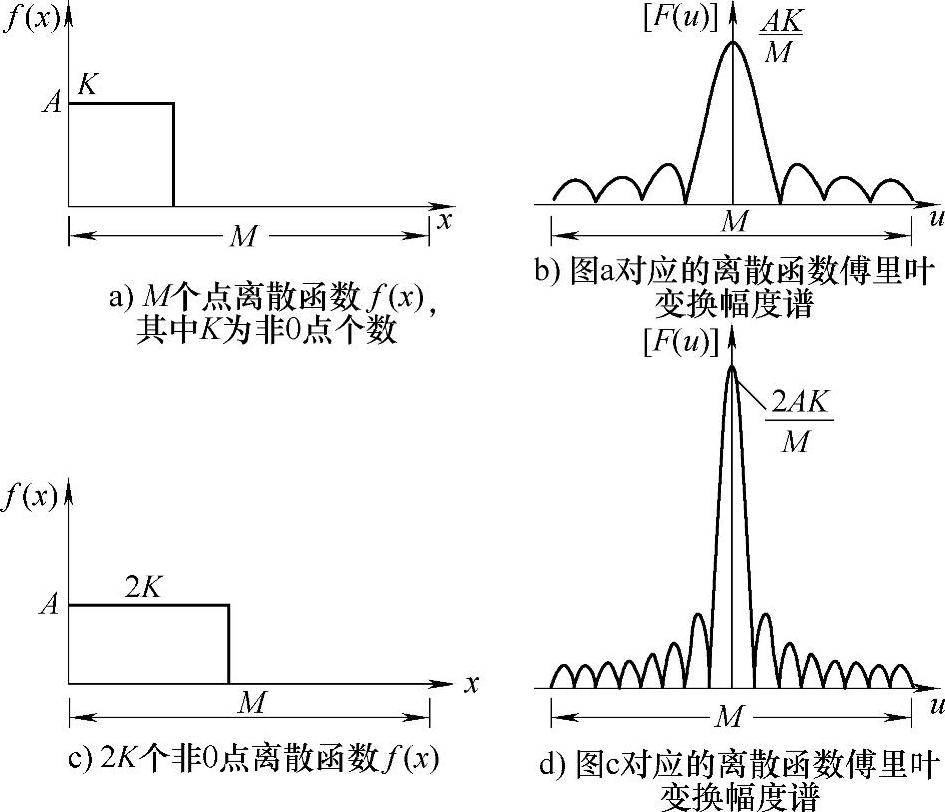
图3.8 简单的M个点离散函数f(x)及其一维离散傅里叶变换幅度谱
有关视觉测量技术的文章

最小类内方差法也称为均匀性度量法。下面以两个区域为例来分析基于多次尝试的最小类内方差法。6)挑选最小类内方差所对应的阈值,即T*为可见最小方差法是一种自动阈值选择方法,整个过程不需要人工设定其他参数。......
2023-11-24

摄影光学系统性能参数摄影光学系统的基本光学性能由焦距、相对孔径和视场角三个特征参数描述。摄影光学系统中光束的限制在摄影物镜中,设有专门的孔径光阑,它限制进入物镜的光通量,决定像的照度。根据国家标准,F数按如下数值给出:F数 1 1.4 2 2.8 4 5.6 8 11 16 22 32底片上的照度与曝光时间的乘积称曝光量。摄影光学系统的景深和几何焦深在摄影时,底片上拍摄的是在物镜视场角范围内的纵深空间中各物体的像。......
2023-11-24

单目视觉测量是指利用一台摄像机或数码相机拍摄图像进行测量工作。但由于标定精度弱和难以同时确定摄像机与被测物体之间的相对位置等问题,单目视觉的整体测量精度不如双目和多目视觉测量系统。单目视觉测量的理论基础和相关技术是双目测量乃至多目测量技术的基础。单目视觉测量能够满足某些应用场合实际测量的要求。基于单目视觉的测量方法主要包括几何相似法、光笔式三坐标测量法、几何形状约束法、几何光学法和结构光测量等。......
2023-11-24
此时,采用前述的外极约束能使整个匹配过程得以简化。不仅如此,上述两个特征点的幅值和方向也应该保持一致。进行匹配算法1)从左特征点图像的第iL行的现行列位置开始,找到下一个待匹配的特征点PLi。如果需要的话,也可引入顺序约束以进一步减少匹配运算。上述过程不断进行直到在右图像上找到具有最大一致性的特征点为止,并将其定为PLi的对应点PRi。显然,该PRi的列指标由jR指示。3)进行行终止检查。......
2023-11-24
线性空间域滤波借助模板与图像进行卷积并在邻域操作。图3.5a所示为一个3×3的均值滤波器,将其应用于图3.4a的子图像,其滤波结果为对于与图3.3b所示模板对应的像素区域,采用图3.5a所示的滤波器进行滤波,其结果为均值滤波器减小了图像灰度的“尖锐”变化。非线性空间域滤波器能够较好地处理椒盐噪声、脉冲噪声和孤立噪声点。 中值滤波器的使用图3.6所示是利用3×3的模板进行中值滤波的示例。......
2023-11-24

最常见的成像变换是几何透视变换,其特点是随着三维场景与摄像机之间距离的变化,像平面上的投影也发生变化。假设摄像机理想成像,不存在非线性畸变,如图5.6所示。针孔模型主要由光心、成像面和光轴组成。图5.6 小孔成像模型......
2023-11-24
单目视觉几何相似法测量是对应于被测对象的几何参数在同一平面内的情况,此时被测物面与摄像系统光轴垂直,并与像平面平行。几何相似法测量只是二维测量,主要有二维几何位置、形状、变形测量、位移和速度的测量等。......
2023-11-24
相关推荐