在工业生产中,计算机视觉技术可以自动检测各种机械零件的几何尺寸,测量其精度范围,目前已经用于产品外形检验、表面缺陷检验等。2)利用计算机视觉技术进行病虫害的监测。在现代战争中,无人机发挥着举足轻重的作用。无人机导航是无人机技术的重要组成部分,基于计算机视觉的无人机导航技术是目前无人机导航领域的研究热点。......
2025-09-30
摄影光学系统是将空间物体成像于感光胶片或图像传感器上的光学系统,也称摄影物镜。当采用胶片摄影时,底片上的感光乳胶感受光的作用获得潜像,经化学处理后即可以显示出与所摄物体明暗相反的像,称为负像或负片。CCD摄像机与数码相机以图像传感器取代了感光胶片,摄影物镜的成像原理与胶片摄影是一致的,其所获得的是空间物体的图像。
(1)摄影光学系统性能参数
摄影光学系统的基本光学性能由焦距、相对孔径和视场角三个特征参数描述。
当物在无穷远时,有
y′=-f′tanW (2.1)
由式(2.1)可见,物镜的焦距决定拍摄图像的大小。
当物在有限远时,有
y′=βy=-(f/x)y (2.2)
由式(2.2)可见,当视角W或焦距x一定时,像的大小y′与焦距成正比。
摄影物镜因其用途不同,其焦距变化范围很大,有短到十几毫米的,也有一米以上的。一般照相机上应用的物镜,焦距在二十几毫米到几百毫米之间。
像面上像元的光照度为

式(2.3)中的入瞳直径与焦距之比2a/f′称为相对孔径。它是摄影系统的重要性能参数。像的光照度除与相对孔径的二次方成比例,相对孔径反映了物镜的光特性,它与透过率K的乘积客观地反应了物镜的光特征。随相对孔径的不同,摄影物镜有弱光、普通、强光、超强光之分。普通镜头的相对孔径大约为1/6.3~1/3.5,而超强光镜头的相对孔径大到1∶1,甚至更大。
摄影物镜的视场角决定了摄入底片或图像传感器的空间范围。任何摄影设备,视场光阑的片框都有固定大小。当配用不同焦距的物镜时,对应的视场角2W可由式(2.1)计算。式中,y′为画幅对角线的1/2。可见长焦距物镜只能有较小的视场角,能对远处物体拍摄得比较大的像,适合于远距离摄影,故常称之为望远镜头或远摄镜头。而短焦距的物镜则有较大的视场角,能将较大范围内的景物摄入底片或传感器,故称之为广角镜头。介于两者之间,焦距约等于画幅对角线长度的物镜称为标准镜头。现在变焦距物镜已得到广泛应用,可以取代不同焦距的定焦镜头。
决定摄影物镜性能的三个参数之间,有着相互制约的关系。这主要反映在像差的校正上。一方面,对于一定的相对孔径和视场角,像差与焦距成正比,但像差的容限并不因焦距的增大而放宽,使得长焦距物镜只能有较小的相对孔径。另一方面,相对孔径大时要控制好宽光束像差非常困难,再要达到大视场就更困难了。这就是说,要设计一个兼顾大孔径大视场角的优良结果是极其困难的。实际上,常根据物镜的具体用途满足其主要的性能指标,即强光镜头只能有较小的视场,而广角镜头只能选较小的孔径。
(2)摄影光学系统中光束的限制
在摄影物镜中,设有专门的孔径光阑,它限制进入物镜的光通量,决定像的照度。为了使同一物镜能适应各种光照条件以控制像面获得适当的照度,孔径光阑都采用大小可连续变化的可变光阑,从而获得多种相对孔径以供选用,并在物镜的外壳上标出各档相对孔径的位置刻线及其倒数,称光圈数或F数。由于像的照度与相对孔径二次方成比例,镜头中所标出的各档F数是以 为公比的等比级数。根据国家标准,F数按如下数值给出:
为公比的等比级数。根据国家标准,F数按如下数值给出:
F数 1 1.4 2 2.8 4 5.6 8 11 16 22 32
底片上的照度与曝光时间的乘积称曝光量。它由镜头的F数和曝光时间所决定。F数按以上形式排列时,正好使相邻两档在曝光量上相差一倍(曝光时间相同时)。摄影时,为使底片正确曝光,即使所摄影像具有与景物明暗程度相对应的光学密度,以显示出影像的明暗层次,应根据底片的感光度,正确控制曝光量。同时,根据景物条件,有时需首先确定F数(光圈优先),有时需先确定曝光时间(快门优先),但都要使F数和曝光时间相匹配。
摄影物镜中,底片框就是视场光阑。由于相对孔径和视场都相对较大,为校正各种像差,物镜须具有相当复杂且正负光焦度分离的结构。这样,为了减小物镜的体积和重量,并拦截那些偏离理想光路较远的光线,提高成像质量,常有意识地减小远距离光阑的透镜直径。
(3)摄影光学系统的景深和几何焦深
在摄影时,底片上拍摄的是在物镜视场角范围内的纵深空间中各物体的像。当把物镜调焦于某一摄影对象时,在该对象的前后能在底片上清晰成像的范围,称为景深。
将入瞳直径2a用F数取代,得到适用于计算摄影物镜景深的公式为


可见景深与物镜的焦距、光圈大小和摄影距离有关。光圈越小(F数越大),或摄影距离越远,景深越大。但远景深度要比近景深度大。若在同一距离用同一光圈值摄影,则焦距短的镜头具有大的景深,反之长焦距的镜头的景深越小。(https://www.chuimin.cn)
由于在使用同一物镜时,景深随光圈大小和摄影距离而变,所以在物镜外壳上,与镜头调焦的距离刻度相关联地标出了光圈数刻度,以粗略指示所选定的光圈数和摄影距离的景深。
严格地说,一个像面只与一个物面对应。当拍摄某一物面时,要通过对镜头的调焦,使之清晰成像于底片平面上。但因眼睛分辨率的限制而存在调焦不准,因为在真正的像面前后也存在一个貌似清晰的深度范围。这一在像空间对同一物面都成清晰像的范围称为几何焦深。
成像光束与像面前后相距Δ′的两个平面相截的弥散圆Z′,如果小到被眼睛看起来是清晰的点像时,则2Δ′即为几何焦深,有

由于摄影物镜一般都具对称或近对称型结构,光瞳放大率约为1,因此可认为入瞳和出瞳分别与物方主面和像方主面重合,引入F数和放大率β,可导出

当对准平面位于无穷远时,几何焦深为

可见,几何焦深与F数有关,相对孔径越大,几何焦深越小。由于调焦不准导致的接收像面上的弥散圆与像面上由于像差所引起的弥散斑相一致,故2Δ′可作为摄影物镜轴向像差的允差。
(4)摄影物镜的分辨率
摄影物镜的分辨率是以焦面上每毫米中能分辨开的黑白相间的条纹来表征的。根据对无穷远两点可能被理想系统分辨开的最小分辨角公式,在摄影物镜焦平面上能分辨开的两条纹之间的相应间距为

其倒数即为摄影物镜的分辨率。当λ=0.00055时,有

可见摄影物镜的分辨率与相对孔径成正比。式(2.10)决定了视场中心的分辨率,视场边缘由于成像光束的孔径角比轴上点小,分辨率有所降低。实际的摄影物镜总有较大的剩余像差,其分辨率要比理想分辨率低得多,而视场边缘受轴外像差和光束渐晕的影响,要低得更多。因此分辨率是衡量摄影物镜的像质指标之一。
图2.30所示是两种检验摄影物镜分辨率的图案,前者由16或25组条纹宽度不等的相同图案按序列排列而成,各组又以条纹方向不同的四个小方块排列起来,根据被检测的物镜能分辨开的最密一组条纹宽度求得物镜的分辨率。后者是一个条纹和间隔的宽度沿径向方向连续变化的图形,根据它被物镜所成的像中分辨不出条纹的模糊直径来求知其分辨率。
检验时,分辨率图表需给予充分而均匀的照明。测试方式可以是直接用显微镜观察图案由物镜所成的像,获得物镜的目视分辨率。也可以用显微镜来观察图案被物镜所拍摄得到的底片,得到物镜的照相分辨率。显然,照相分辨率由被摄影物镜的分辨率和底片的分辨率共同决定。一般照相分辨率要比目视分辨率低得多。物镜的目视分辨率NL、照相分辨率NP与底片分辨率NF之间的关系如下:

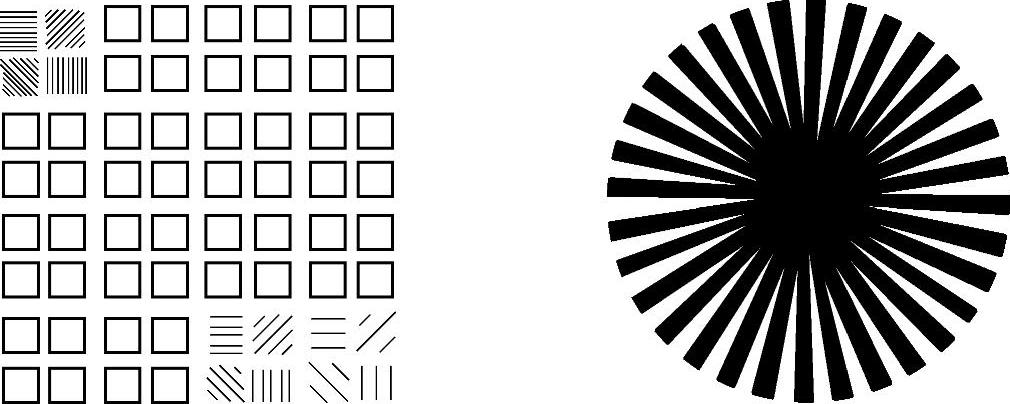
图2.30 检验摄影物镜分辨率的图案
(5)摄影物镜
摄影物镜属大孔径大视场系统,需要对各种像差做全面校正。但由于其光量接收器——感光乳胶的粒子或图像传感器相对较粗,对像差的要求要比目视光学系统低得多,属大像差系统。
设计摄影物镜时,一般对无穷远物面校正像差。因为在一般摄影时,拍摄距离总要比物镜的焦距大得多。对于只对有限远物体摄影的物镜,应按最常用的拍摄距离或摄影倍率来进行设计。
摄影物镜随相对孔径和视场的大小而不同,并且结构繁多。只要结构不是特别不合理或过于简单,七种初级像差一般都能被校正到目标值。又因为各种形式物镜的高级像差和像差特征不会有明显变化,所以要从高级像差出发来选择结构,并使初级像差和高级像差合理平衡。
相关文章

在工业生产中,计算机视觉技术可以自动检测各种机械零件的几何尺寸,测量其精度范围,目前已经用于产品外形检验、表面缺陷检验等。2)利用计算机视觉技术进行病虫害的监测。在现代战争中,无人机发挥着举足轻重的作用。无人机导航是无人机技术的重要组成部分,基于计算机视觉的无人机导航技术是目前无人机导航领域的研究热点。......
2025-09-30

计算机视觉测量技术以图像传感器为手段检测空间物体的空间三维坐标,进而检测物体的尺寸、形状和运动状态等。美国、加拿大、日本等发达国家早在20世纪60年代后期就已经开始了计算机视觉测量技术的研究。直到20世纪90年代,随着计算机技术的发展成熟,计算机视觉测量技术逐渐成为一个研究热点。......
2025-09-30
下面简要介绍Marr视觉理论的基本思想和框架。图1.1 Marr视觉信息处理的三个阶段第一阶段是早期视觉处理,其目的是从输入的原始图像中抽取观察者周围景物表面的物理特性,如距离、表面方向、材料特性等,并构成要素图或基元图。表1.2 由图像恢复形状信息的表达框架3.Marr视觉理论的意义及不足Marr视觉理论是计算机视觉研究领域的划时代成就。图1.2 改进后的Marr视觉理论框架限于历史等因素,Marr没有研究如何用数学方法严格地描述视觉信息的问题。......
2025-09-30

具体来说,计算机视觉测量系统的关键技术主要包括光源照明技术、图像处理与分析技术、摄像机标定技术、三维测量技术、图像拼接技术和三维重构技术等。而图像处理器的发展也为工业图像测量系统带来了新的机会和技术问题解决方案。......
2025-09-30

借鉴人类视觉的原理,计算机视觉技术研究的长远目标是建立通用的视觉系统。计算机视觉技术的优势不仅在于能模拟人眼的功能,还能完成人眼所不能胜任的工作。因此,对人脑视觉的充分理解将促进对计算机视觉更深入的研究,并对计算机视觉系统提供坚实的生物理论基础。......
2025-09-30

第一节 光的基本特性光是摄影的基础,它不仅能满足摄影的照明和感光材料的曝光的需要,在摄影表现中,它还是一种重要的造型手段。同一对象在不同的光位下就产生不同的明暗造型效果。4.光比光比是指被摄物体主要部位的亮部与暗部的受光量差别。光比的这种“刚”性和“柔”性取决于照明光束的方向、光源和被摄物体的相对大小及两者之间的距离、主光与辅光之间的强度之比等因素。辅助光,简称辅光,是除主光之外的一切照明光线。......
2025-09-29

若引入机器视觉取代传统的人工检测方法,能极大地提高生产效率和产品的良品率。同时,机器视觉技术还能在检测超标准烟尘及污水排放等方面发挥作用。利用机器视觉,能够及时发现机房及生产车间的火灾、烟雾等异常情况。此外,许多场合使用其他方法难以完成检测任务,机器视觉系统则可出色胜任。......
2025-09-29
2)重构 对这些数据进行处理和三维重构,建立CAD数据模型。天津大学还开发了我国首台白车车身激光视觉检查站,实现了整个车身的三维尺寸的自动测量。......
2025-09-30
相关推荐