计算机视觉测量技术以图像传感器为手段检测空间物体的空间三维坐标,进而检测物体的尺寸、形状和运动状态等。美国、加拿大、日本等发达国家早在20世纪60年代后期就已经开始了计算机视觉测量技术的研究。直到20世纪90年代,随着计算机技术的发展成熟,计算机视觉测量技术逐渐成为一个研究热点。......
2023-11-24
计算机视觉测量系统是计算机视觉技术在测量领域中的延伸,因此两者的结构基本相同。与普通的视觉系统相比,视觉测量系统对照明光源、成像系统及图像处理有着更高的要求。在实际应用中,为了达到更高的测量精度,一般都附加视觉反馈系统。网络化已经成为一种趋势,在现代化的制造业、军事、航空航天等应用领域,网络化的测量系统已经逐步得到应用。因此典型视觉测量系统的结构如图1.7所示,其基本工作流程可以描述为,光学系统将被测目标成像在CCD摄像机的光敏面上;CCD摄像机的光敏单元将被测目标图像转换为电信号;通过A-D转换器,图像采集卡将模拟电信号转换为数字图像信号,并将其输入到计算机;计算机利用图像处理技术对获取的图像进行各种变换和操作,对图像中感兴趣的目标进行测量,从而获得图像特征物的特征参数,提供分析和反馈控制,最后根据预设的容许度和其他条件输出结果。对于那些网络化的应用,被测物体的图像可以通过各种传输介质传输到计算机处理系统。
1.光源
光源是影响视觉测量系统输入的重要因素。这是因为它直接影响输入数据的质量和应用效果。由于没有通用的视觉测量系统照明设备,所以针对每个特定的应用实例,要选择相应的照明装置,以达到最佳效果。
许多工业用的视觉测量系统用可见光作为光源,这主要因为可见光容易获得、价格低,并且便于操作。常用的几种可见光源是白炽灯、荧光灯、汞灯和钠灯。但是,这些光源的一个最大缺点是光量不能保持稳定,随着使用时间的增加,光量将不断下降。因此如何使光量在一定程度上保持稳定,是实用化过程中需要解决的问题。另一个方面,环境光将改变这些光源照射到物体上的总光量,使输出的图像数据存在噪声,一般采用加防护屏的方法减少环境光的影响。由于存在上述问题,在现今的工业应用中,对于某些要求高的测量任务常采用X射线、超声波等不可见光作为光源。
由光源构成的照明系统按其照射方法可分为透射式照明、反射式照明、结构光照明和频闪光照明等。其中,透射式照明是把被测物放在光源和摄像机之间,采用背光源照明,其目的在于提高目标与背景的对比度。它的优点是能获得高对比度的图像反射式照明是光源和摄像机位于被测物的同侧,使被测物的照度均匀分布,这种方式便于安装结构光照明是将光栅或线光源等一定类型的结构光投射到被测物上,根据它们在物体上产生的畸变,解调出被测物的三维信息频闪光照明是将高频率的光脉冲照射到物体上,要求摄像机的扫描速度与光源的频闪速度同步。

图1.7 典型视觉测量系统的结构
2.图像处理系统(www.chuimin.cn)
图像处理系统是整个计算机视觉测量系统的关键,其处理精度直接影响着整个视觉测量装置的精度。处理器运用不同的算法来提高对测量精度有重要影响的图像特性。处理器提取图像特性,测量被测目标的几何参数或频谱参数。例如,集成电路制造中对BGA引脚高度的检测。视觉测量系统中,信息的处理技术主要依赖于图像处理方法,包括图像滤波、图像增强、图像分割、图像特征抽取、图像识别与理解等内容。
从组建计算机视觉测量系统的时间周期看,图像处理软件的总体开发过程会占据整个开发时间的1/2以上,由此可见图像处理系统所需投入的开发成本之大。算法是软件的灵魂,决定着软件的可靠性、运算速度、安全性和鲁棒性等重要指标,这些指标左右着图像处理系统的成败。因此,如何在具体的应用中采用更好的算法以最大限度地降低计算结果与理想对象的误差,是图像处理系统研究的重要课题,并决定着计算机视觉测量系统的发展方向。
3.视觉反馈控制系统
视觉反馈控制系统的基本功能是根据测量任务的需要,实现照明系统的光场调节和摄像机的位置、视角、焦距等参数的调节控制。按部件功能划分,可分为控制器单元和执行机构单元两部分。控制器单元是整个反馈控制系统的核心。它通过对系统各状态变量的观测做出判断,进而为执行机构单元发出各种指令,以满足测量任务的需求。
设计计算机视觉测量系统时应遵循以下设计原则:①保证充分的视场;②足够的图像分辨率;③清晰的图像对比度;④尽量缩短图像获取时间;⑤使系统工作稳定、抗干扰、低成本。此外,还要综合考虑视场范围、分辨率的大小,以及景深长短等因素。图1.8所示为一个典型的视觉测量系统。
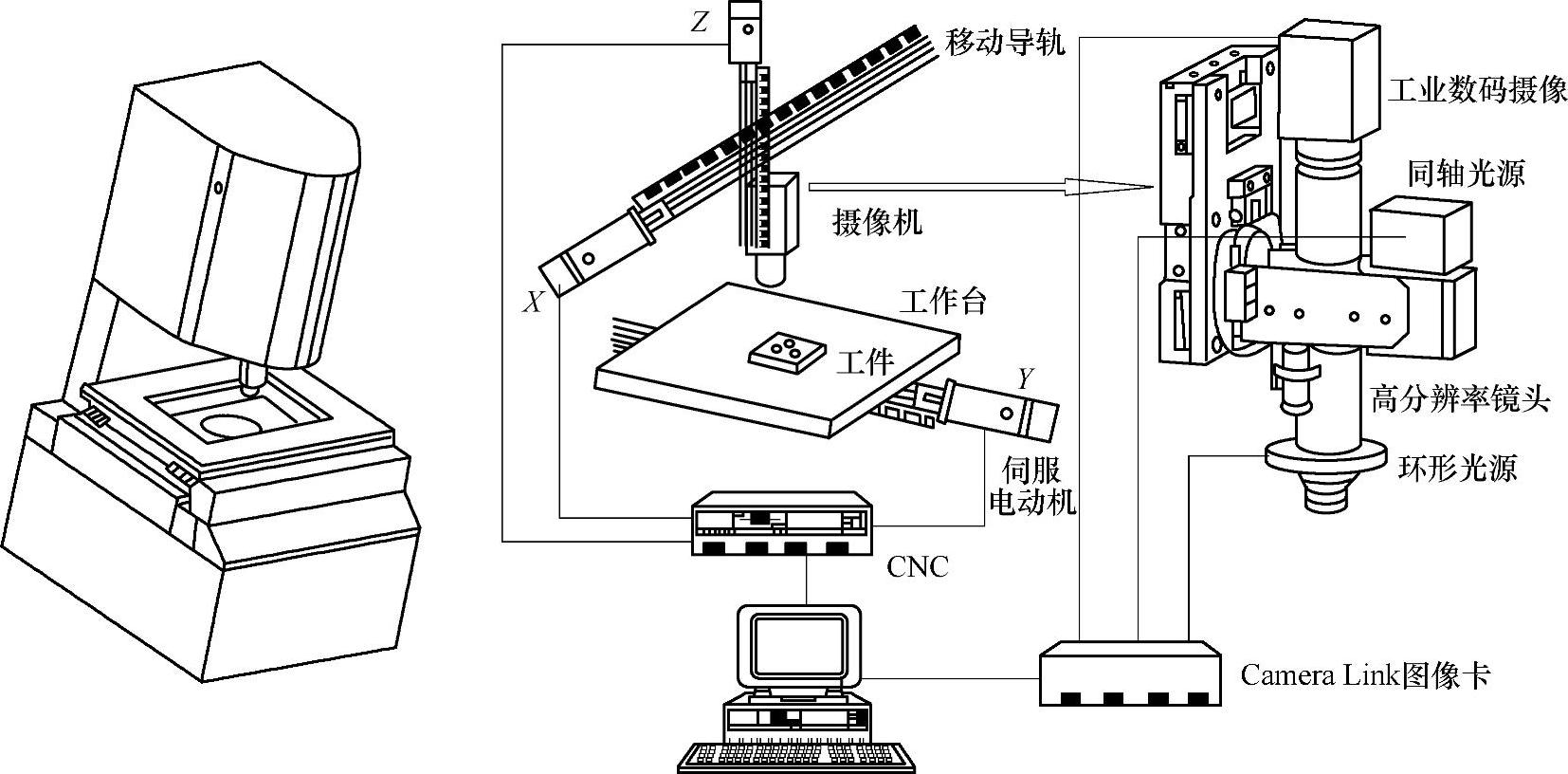
图1.8 典型的视觉测量系统
有关视觉测量技术的文章

计算机视觉测量技术以图像传感器为手段检测空间物体的空间三维坐标,进而检测物体的尺寸、形状和运动状态等。美国、加拿大、日本等发达国家早在20世纪60年代后期就已经开始了计算机视觉测量技术的研究。直到20世纪90年代,随着计算机技术的发展成熟,计算机视觉测量技术逐渐成为一个研究热点。......
2023-11-24

下面简要介绍Marr视觉理论的基本思想和框架。图1.1 Marr视觉信息处理的三个阶段第一阶段是早期视觉处理,其目的是从输入的原始图像中抽取观察者周围景物表面的物理特性,如距离、表面方向、材料特性等,并构成要素图或基元图。表1.2 由图像恢复形状信息的表达框架3.Marr视觉理论的意义及不足Marr视觉理论是计算机视觉研究领域的划时代成就。图1.2 改进后的Marr视觉理论框架限于历史等因素,Marr没有研究如何用数学方法严格地描述视觉信息的问题。......
2023-11-24

借鉴人类视觉的原理,计算机视觉技术研究的长远目标是建立通用的视觉系统。计算机视觉技术的优势不仅在于能模拟人眼的功能,还能完成人眼所不能胜任的工作。因此,对人脑视觉的充分理解将促进对计算机视觉更深入的研究,并对计算机视觉系统提供坚实的生物理论基础。......
2023-11-24

白色背景下的黑色普通标志是视觉测量或近景数字摄影测量常用的人工标志。工业数字摄影测量使用彩色标志是利用光的相减混色法。图2.51 白色光照射红色标志示意图通过相减混色可以有效地对彩色标志进行识别,不足之处是丢失标志的空间分辨率。如图2.51所示,白光照射红色标志,红色标志吸收的青色,只有红色光返回,在图像中形成红色标志图像。......
2023-11-24

高斯噪声高斯噪声是指概率密度函数服从高斯分布的一类噪声。在弱光照的情况下,其影响更为严重,此时常用具有泊松分布的随机变量作为光电噪声的模型。这意味着噪声的幅度是与信号有关的。大量实验研究发现,由摄像机拍摄得到的图像受离散的脉冲、椒盐噪声和零均值的高斯噪声的影响严重。消除图像中的噪声成分叫做图像的平滑化或滤波操作。......
2023-11-24

系统标定等研究内容一般也在这个层次上进行。它要求图像技术工作在一个整体的框架下进行。图像处理是底层操作,它主要在图像的像素级上进行处理,处理数据量大。图1.3 图像工程的三层次示意......
2023-11-24

双目视觉测量系统的标定主要是指摄像机内部参数标定后,确定视觉系统结构参数R和T。实际上,在双目视觉测量系统的标定方法中,是由标定靶标对两台摄像机同时进行摄像机摄像标定,以分别获得两台摄像机的内、外参数,从而不仅可以标定出摄像机的内部参数,还可以同时标定出双目视觉测量系统的机构参数。......
2023-11-24

图5.11 世界坐标系与摄像机坐标系不重 合时的投影成像2.世界坐标系与摄像机坐标分开时的摄像机模型考虑更一般的情况,即摄像机坐标系和世界坐标系分开的情况,但仍将平面xy和像平面x′y′重合。图5.11所示为这种情况下的摄像机几何模型,像平面中心(原点)与世界坐标系的位置偏差记为矢量D,其分量为Dx、Dy、Dz。图5.12所示为考虑这些因素时的通用摄像机模型示意图。......
2023-11-24
相关推荐