对大型、重型工作级别的起重机械的吊钩,还应用无损检测检验吊钩内部是否存在缺陷。所以当电动机工作停止或事故断电后,电磁铁能自动断电,制动器便自动抱闸,工作安全可靠。表6-21 长行程制动器制动瓦块与制动轮间允许间隙(单侧) 起重机械制动器安全使用要求1)动作灵活、可靠,调整应松紧适度,无裂纹。5)吊运炽热金属、易燃易爆危险品或发生溜钩后有可能导致重大危险或损失的起重机械,其升降机构应装设两套制动器。......
2023-11-22
由于各企业、各行业对起重机械的使用要求不一样,作业环境也不一样,所以做好起重机械的安全运行应遵守各种安全技术要求。
1.【案例6-5】 某大型集团制订起重机械运行技术要求
(1)起重机械停车保护装置的安全技术要求
1)各种开关接触良好、动作可靠、操作方便。在紧急情况下可迅速切断电源(地面操作的电动葫芦按钮盒也应装紧停开关)。
2)起重机大、小车运行机构,轨道终端立柱四端的侧面,升降机(或电梯)的行程底部极限位置均应安装缓冲器。
3)各类缓冲器应安装牢固。采用橡胶缓冲器时,小车用的厚度为50~60mm,大车用的为100~200mm;如采用硬质木块,则木块表面应装有橡皮。
4)轨道终端缓冲器(止挡器)应能承受起重机在满负荷运行时的冲击。50t及以上的起重机宜安装超负荷限制器。电梯应安装负荷限制器以及超速和失控保护装置。
5)桥式起重机零位保护应完好。
(2)起重机械信号与照明安全技术要求
1)除地面操作的电动葫芦外,其余各类起重机、升降机(含电梯)均应安装音响信号装置,载人电梯应设音响报警装置。
2)起重机主滑线三相都应设指示灯,颜色为黄、绿、红。当轨长大于50m时,滑线两端应设指示灯,在电源主开关下方应设司机室送电指示灯。
3)起重机司机室照明应采用24V和36V安全电压。桥架下照明灯应采用防振动的深碗灯罩,灯罩下应安装10mm×10mm的耐热防护网。
4)照明电源应为独立电源。
(3)起重机械PE线与电气设备安全技术要求
1)起重机供电宜采用TN—S(三相五线制)或TN—C(三相四线制)系统,将电网的PE线与起重机轨道紧密相连。
2)起重机上各种电气设备设施的金属外壳应与整机金属结构有良好的连接,否则应增设连接线。
3)起重机轨道应采用重复接地措施,轨长大于150m时应在轨道对角线设置两处接地。但在距工作地点不大于50m内已有电网重复接地时可不要求。
4)起重机两条轨道之间应用连接线牢固相连。同端轨道的连接处应用跨接线焊接(钢梁架上的轨道除外)。连接线、跨接线的截面要求:圆钢不小于30mm2(φ6~φ8mm),扁钢不小于150mm2(3mm×50mm或4mm×40mm)。
5)升降机(电梯)的PE线应直接接到机房的总地线上,不许串联。
6)电气设备与线路的安装符合规范要求,无老化、无破损、无电气裸点、无临时线。
(4)起重机滑轮报废标准 滑轮轮槽不均匀磨损量达3mm,壁厚磨损量达原厚度的15%,或轮槽底部直径减小量达钢丝绳直径的30%时,滑轮应报废。
(5)起重机械防护罩栏、护板安全技术要求
1)起重机上外露的、有伤人可能的活动零部件,如联轴器、链轮与链条、传动带、带轮、凸出的销键等,均应安装防护罩。
2)起重机上有可能造成人员坠落的外侧均应装设防护栏杆,护栏高度应不小于1050mm,立柱间距应不大于100mm,横杆间距为350~380mm,底部应装底围板(踢脚板)。
3)桥式起重机大车滑线端梁下应设置滑线护板,防止吊索具触及(已采用安全封闭的安全滑触线的除外)。
4)起重机车轮前沿应装设扫轨板,距轨面不大于10mm。
5)起重机走道板应采用厚度不小于4mm的花纹钢板焊接,不应有曲翘、扭斜、严重腐蚀、脱焊现象。室内不应留有预留孔,如无小物体坠落可能时。孔径应不大于50mm。
(6)起重机械安全标志、消防器材安全技术要求 应在醒目位置挂有额定起重量的吨位标示牌。流动式起重机的外伸支腿、起重臂端、回转的配重、吊钩滑轮的侧板等,应涂以安全标志色。
司机室、电梯机房应配备小型干粉灭火器,且在有效期内,置放位置安全可靠。
(7)起重机械需要装设极限限位器 常用的极限限位器是过卷扬限位器,也叫上极限限位器,应能保证吊钩上升到极限位置时(电动葫芦大于0.3m,双梁起重机大于0.5m),自动切断电源。新装起重机还应有下极限限位器。需要装设极限位置限位器的是:
1)在轨道上运行的各种起重机应装设行程限位器和防冲撞装置,保证两台起重机相互行驶在相距0.5m或起重机行驶在距极限端0.5~3m(视吨位定)时自动切断电源。
2)升降机(或电梯)的吊笼(轿厢)越过上下端站30~100mm时,越程开关应切断控制电路;当越过端站平层位置130~250mm时,极限开关应切断主电源并不能自动复位。极限开关不许选用刀开关。
3)变幅类型的起重机应安装最大、最小幅度时防止臂架前倾后倾的限制装置。当幅度达到最大或最小极限时,吊臂根部应触及限位开关,切断电源。
(8)起重机械联锁装置 需要安装起重机械联锁装置的是:
1)桥式起重机司机室门外、通向桥架的仓口以及起重机两侧的端梁门上应安装门舱联锁保护装置。
2)升降机(或电梯)的层门必须装有机械电气联锁装置,轿门应装电气联锁装置。
3)载人电梯轿厢顶部安全舱门必须装联锁保护装置。
4)载人电梯轿门应装动作灵敏的安全触板。
(9)起重作业安全操作技术
1)司机应严格按指挥信号操作,对紧急停止信号,无论何人发出,都必须立即执行。
2)司机在正常操作过程中,不得进行下列行为:①利用极限位置限制器停车。②利用打反车进行制动。③起重作业过程中进行检查和维修。④带载调整起升、变幅机构的制动器,或带载增大作业幅度。⑤吊物从人头顶上通过,吊物和起重臂下站人。
3)吊载接近或达到额定值,或起吊危险器(液态金属、有害物、易燃易爆物)时,吊运前认真检查制动器,并用小高度、短行程试吊,确认没有问题后再吊运。
4)露天作业的轨道起重机,当风力大于6级时,应停止作业;当工作结束时,应锚定住起重机。
(10)司索工安全操作要求
1)准备吊具。对吊物的重量和重心估计不准的,应增大20%来选择吊具,每次吊装前对吊具进行认真检查,不用报废的吊具。
2)捆绑吊物。对吊物进行必要的归类、清理和检查,切断与周围管、线的一切联系;清除吊物表面或空腔内的杂物,将可移动的零部件锁紧或捆牢,形状或尺寸不同的物品不经特殊捆绑不得混吊,防止坠落伤人;吊物捆扎部位的飞边要打磨平滑,尖棱利角应加垫物,防止起吊吃力后损坏吊索;表面光滑的吊物应采取措施来防止起吊后吊索滑动或吊物滑脱;吊运大而重的物体应加诱导绳,诱导绳长应能使司索工既可握住绳头,同时又能避开吊物正下方,以便发生意外时司索工可利用该绳控制吊物。应做到起重或吊物重量不明不挂,重心位置不清楚不挂,尖棱利角和易滑工件、无衬垫物不挂,吊具及配套工具不合格或报废不挂,包装松散、捆绑不良不挂等。
3)挂钩起钩。在确认吊挂完备,所有人员都离开站在安全位置以后,才可发出起钩信号。起钩时,地面人员不应站在吊物可能倾翻、坠落可波及的地方;如果作业场地为斜面,则应站在斜面上方(不可在死角),防止吊物坠落后继续沿斜面滚移伤人。(www.chuimin.cn)
2.【案例6-6】 起重机械制动器的控制和调试
制动器是起重机械的重要安全装置,它的设置、控制和调试的正确与否至关重要,如有不当,便会造成设备事故和人员伤亡事故。如2008年5月江苏省某船厂新装一台32t龙门式起重机,投入使用后不久,便发生一起船体分段坠落事故,原因是控制制动器的接触器因铁心极面附着油污而延时释放,导致制动器未能及时闭闸而发生重大安全事故,造成了巨大的经济损失。
根据TSG Q0002—2008《起重机械安全技术监察规程—桥式起重机》规定:“起重机动力驱动的起升机构和运行机构应当设置制动器,人力驱动的起升机构应当设置制动器或者停止器。吊运熔融金属或发生事故后可能造成重大危险或者损失的起重机的起升机构,其每套驱动系统必须设置两套独立的工作制动器”。两套独立的工作制动器不仅是每只制动器能够独立制动额定载荷,更重要的是在电气上也应保证独立控制,即一套制动控制系统失效,另一套控制系统也能够立即动作支持额定载荷,这才能真正实现制动双保险。
(1)通用起重机制动器设置 对于通用起重机起升机构制动器的设置虽没有特殊要求,但目前常用的单接触器控制方式有一定的安全隐患,如果日常维保不到位,造成此接触器粘连无法正常打开,此时重物将失去支持自由下滑,尤其是大型起重机,一旦发生事故,后果不堪设想。起重机尽管设有较多安全装置,但最终都归属于制动保护,所以起重机制动系统可靠与否将直接影响其使用安全性。将制动系统主电路用两只接触器串联进行控制,如图6-11所示,此时指令信号同时控制接触器K1和K2,这样即可提高制动系统的可靠性,防止因接触主触头不释放故障而发生事故,而且实现容易,成本也很低廉,但其安全性却大大增加。
(2)吊运熔融金属起重机制动器的设置如图6-12所示,虽然吊运熔融金属起重机起升机构的每套驱动系统设置了两套工作制动器,但是忽视了两套制动器的合理控制和正确调试,当制动器接触器发生故障(如机械可动部位卡阻、触头弹簧反力压力过小、触头熔焊、铁心极面附着油污或尘埃、铁心剩磁较大等)时,主触头不能释放,此时控制电路虽已断开失电,但两套制动器仍受同一套接触器控制,同时处于通电松闸状态,从而会造成严重的坠落事故,这就失去了两套制动器设置的实际意义,而且两套制动器合用一只接触器并不利于制动器制动力矩的调整。
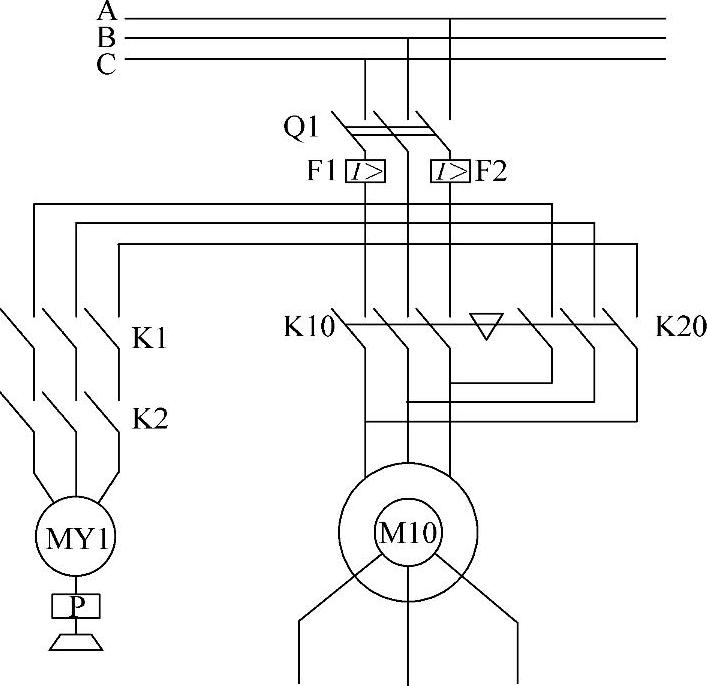
图6-11 两只串联接触器控制
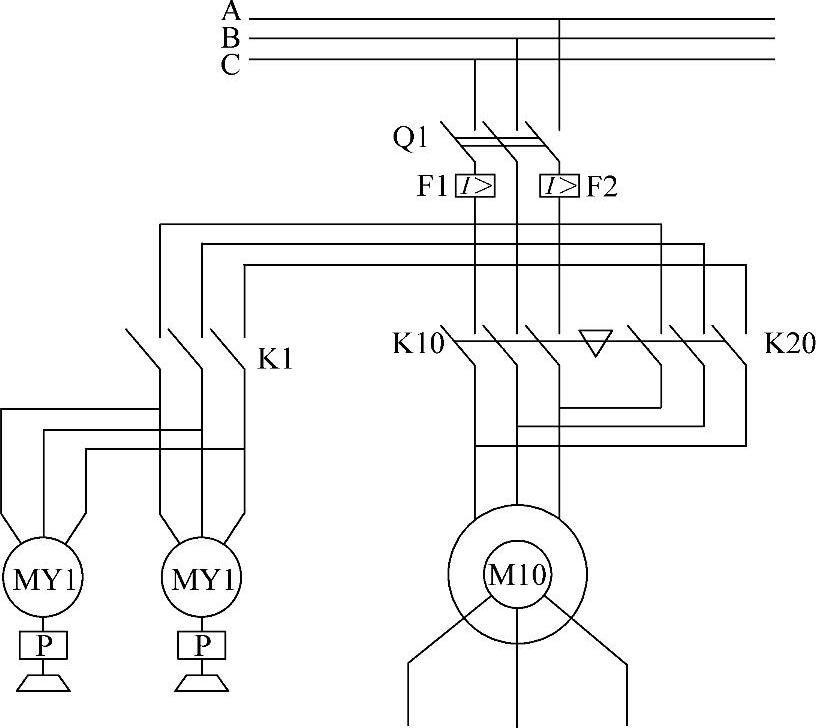
图6-12 两套制动器设置错误示意图
后来改为在制动器主电路上将两套制动器各用一只接触器进行控制,两只接触器的指令信号为同一个,如图6-13所示。当一套制动系统发生故障时,另一套仍能起到保护作用,达到了两套制动器的设置目的,而两只接触器K1、K2在同一时间内发生故障的机率极小。采用此电路,便于分别测试两个制动器的制动力矩,即都能单独支持起重机吊起的额定载荷。测试时,可将一只接触器(K1或K2)人为吸合,此时一套制动器松闸,看另一套制动器是否能支持住额定载荷,同样方法再调试另一个制动器,调试步骤大大简化,更重要的是安全得到可靠保证。
3.【案例6-7】 大型露天起重机械防风装置的应用
近年来,港口起重发展迅速,其特点是技术先进、设备大型化、造价高、速度快、效率高。由于沿海地区风力大,天气多变,因此防风问题越来越重要。防风方式不当、防风装置落后或人员操作不当等,会发生起重机械被大风吹走、倾翻等严重事故,造成巨大的经济损失,甚至导致人员伤亡。目前我国很多港口在用大型起重机械的技术改造,重点是工作状态下的防风方式和防风装置的设置。
起重机械防风方式分为非工作状态下的防风和工作状态下的防风。非工作状态下的防风问题是比较容易解决的,一般是将起重机械停在某个固定位置,通过防风拉索、地锚等装置将起重机械固定在码头上。工作状态下的防风是通过某种防风装置,防止起重机械在工作状态下因受到突发性大风作用产生意外滑移而导致事故发生。工作状态下的防风不可能采用非工作状态下的那种固定措施,一般只能通过起重机械自身的某些装置使起重机械与轨道之间产生一定的阻力来抵抗风力的作用,而这种阻力往往是有限的,所以工作状态下的防风要困难和复杂得多。
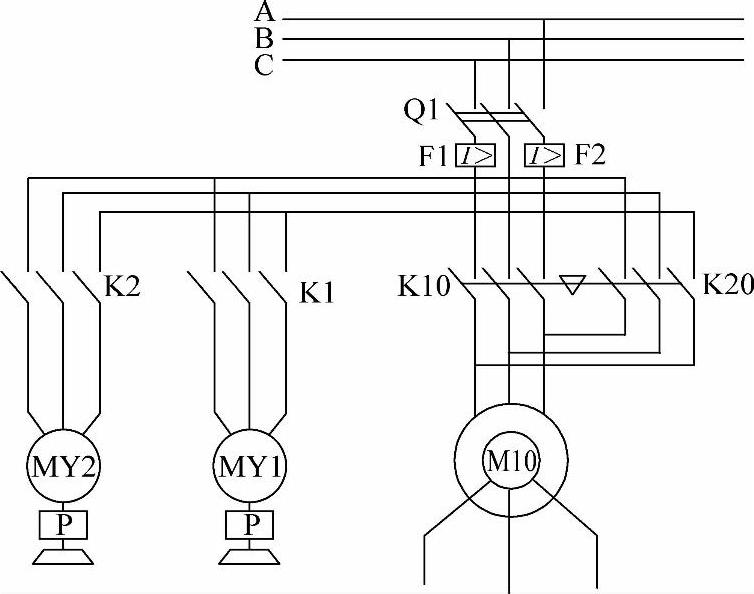
图6-13 一只接触器控制两套制动器的方案
(1)工作状态下常用的防风装置 工作状态下防风装置的作用主要是为了防止起重机械在作业过程中受到突发性阵风的作用而沿轨道爬行。工作状态下常用的防风装置及其特点如下。
1)夹轨器。这是一种传统的防风装置。当起重机械在很大风力的冲击作用下产生振摆时,夹轨器容易因钳体滑动而失效,同时,由于其夹持面比较小且在轨道侧面,轨道挠曲可能对夹持效果产生严重影响,从而导致其防风可靠性差。夹轨器防风能力较小的原因是其作用点少,每台车只能装两台(海陆侧各一台)。目前常用夹轨器的夹紧力一般在440kN以下,每台夹轨器理想状态下的摩擦阻力只有264kN。
2)顶(压)轨器。这是目前使用较多的一种防风装置。顶轨器直接顶定在轨道踏面上,其作用是比较可靠的,但轨道垂直方向挠曲对顶轨力会产生影响,所以如何减少轨道挠曲对其影响非常重要。除改善轨道铺设质量外,最重要的措施是选好安装位置,应尽量安装在门腿下的主平衡梁下面,使顶轨器两侧车轮支点之间的距离最短。顶轨器的作用点也是较少的,每台车一般只能装4台(海陆侧各2台)。目前最大顶轨器的顶轨力是400kN,每台顶轨器理想状态下产生的摩擦阻力可达160kN。
3)防风铁楔。防风铁楔结构简单、成本低廉,但可靠性较差,防风能力有限,对于大型自动控制的起重来说,运行故障很高,在大型起重设备中,尤其是在PLC系统控制的起重机械中不宜采用。
(2)新型液压轮边制动器的作用 轮边制动器的作用原理是:当机构减速停车后,通过对车轮施加一个足够的制动力矩,使得起重机械在风力的作用下,车轮的滚动阻力增大(直至车轮打滑),从而产生与风力作用相反的滚动摩擦(静态或动态)阻力或滑动摩擦阻力(车轮打滑时变成滑动摩擦阻力),达到抵抗风力的作用。当机构要起动(开车)时,轮边制动器通过PLC系统控制提前进行驱动释放(开闸),使制动器的制动衬垫脱离车轮制动覆面,消除制动力矩。轮边制动器一般只用于大车运行机构的被动车轮的制动,具有结构刚强紧凑、功能齐全、少维护的优点,但必须与液压系统配套使用。
轮边制动器的显著特点如下。
1)体积小,结构紧凑、安装简易,无需较大的安装支架,可降低整机重量。
2)轮边制动器是通过复合材料制成的摩擦衬垫与轮缘侧面形成摩擦副,而不是钢对钢摩擦,所以具有非常稳定的摩擦性能和防风(维持)制动效果。
3)一台车上可设置多台轮边制动器,使整机具有较高的抗台风能力。
4)在紧急状态下可实施动态紧急制动,这是夹轨器等都无法实现的。
(3)应用计算 某港一台60t岸桥起重机由于设备庞大,对起重机的防风提出了较高的要求,要求起重机在工作状态下能够抵抗短时35m/s风速强台风的能力。
1)起重机的主要参数:吊具下额定起重量最大为60t;悬臂为45m;轨距为22m;最大起升高度为轨面上40m;大车车轮数量为32;工作状态的最大大车轮压为40t;大车驱动轮高速轴制动力矩为120N·m,总传动比为102。
2)起重机的风载参数:总迎风面积A=1000m2;风速v=35m/s;风力系数C=1.3;起重机在工作状态下可能承受的最大风载FW=CqA=0.613Cv2A=0.613×1.3×352×1000N=976202.5N。
该起重机共有车轮32个,车轮直径为800mm;大车驱动采用了16点驱动方式,即驱动轮16个,被动轮16个。为满足这种高等级的防台风要求,该车采用了全部大车行走轮制动方案,全部驱动轮在高速轴上采用了外置式制动器,用于起重机运行过程中的正常减速制动和辅助防风制动,全部被动轮采用了专业厂家生产的轮边制动器,用于工作状态下的防风制动(同时作为非工作状态下的辅助防风制动)。
3)轮边制动器规格的选定:轮边制动器的规格主要根据起重机大车行走轮来确定;在本例中,选择WB70规格的轮边制动器(规格中70表示适配的夹紧力,在此夹紧力下,制动器的制动力矩可保证车轮在外力的作用下不能产生滚动而只能打滑)。
4)防风能力计算:由轮边制动器产生的抗风阻力FRL和由驱动轮高速轴制动产生的抗风阻力FRB的计算公式为
FRL=nZLpμ
式中 nZL——轮边制动的制动点数量;
p——平均轮压(N);
μ——车轮与轨道之间的滑动摩擦因数,一般取0.12。
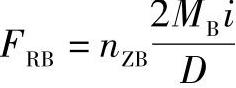
式中 nZB——驱动轮高速轴制动的制动点数量;
D——车轮踏面直径(m);
MB——驱动轮高速轴制动力矩(N·m);
i——驱动轮总传动比。
本例中,nZL=16,p=400000N,nZB=16,D=0.8m,MB=120N·m,i=102,由上述公式可得
所以,总的抗风阻力为FR=FRL+FRB=768000N+489600N=1257600N>976202.5N,可完全满足35m/s风速下的抗风要求;实际可抵抗风速为
 。
。
5)比较结果可看出,对于大型起重机采用轮边制动器完全可以满足35m/s强台风的防风要求,而采用夹轨器则很难满足这一要求。
6)可靠性比较:夹轨器的夹持效果容易受到轨道不平和弯曲以及轨道沟异物等的影响。此外,由于夹轨器的夹持面较小,力学稳定性较差,当受到外力时(如起重机在风力等作用下产生振摆或起重机作业产生较强振动)容易失效,而现在码头多为回填式码头,轨道下沉大,并且两边轨道下沉量不一样,这就造成夹轨器极易失效。轮边制动器是利用轮压及车轮与轨道之间的摩擦产生抗风阻力,轮压和摩擦系数都是非常稳定的参数,所以采用轮边制动器进行防风具有很好的稳定性和很高的可靠性,并且可与风速仪相连,实现实时自动控制,避免人为操作带来的弊端。
7)突发性大风对工作状态下的起重机具有极大的破坏性,因此有效的、工作状态下的防风装置对大型港口起重装卸机械的安全起着重要的保护作用。对在工作状态下各种防风装置的比较表明,采用轮边制动器是目前最可靠和效果良好的装置,它可对起重机的全部车轮进行有效制动,确保每个车轮不会发生滚动。
有关特种设备管理与事故应急预案的文章

对大型、重型工作级别的起重机械的吊钩,还应用无损检测检验吊钩内部是否存在缺陷。所以当电动机工作停止或事故断电后,电磁铁能自动断电,制动器便自动抱闸,工作安全可靠。表6-21 长行程制动器制动瓦块与制动轮间允许间隙(单侧) 起重机械制动器安全使用要求1)动作灵活、可靠,调整应松紧适度,无裂纹。5)吊运炽热金属、易燃易爆危险品或发生溜钩后有可能导致重大危险或损失的起重机械,其升降机构应装设两套制动器。......
2023-11-22

2)压力管道使用单位应当使用符合TSG D0001—2009要求的压力管道。新压力管道投入使用前,使用单位应当核对是否具有TSG D0001—2009要求的安装质量证明文件。⑦管道事故的抢救、报告、协助调查和善后处理。管道操作人员在作业中应当严格执行压力管道的操作规程和有关的安全规章制度。11)在用管道发生故障、异常情况,使用单位应当查明原因。......
2023-11-22

锅炉压力容器在正式使用前,必须到当地特种设备安全监察机构登记,经审查批准入户建档、取得使用证方可使用。使用锅炉压力容器的单位,应对设备进行专责管理,即设置专门机构、责成专门的领导和技术人员管理设备。锅炉司炉、水质化验人员及压力容器作业人员,应分别接受专业安全技术培训并考试合格,持证上岗。锅炉压力容器在运行中发生事故,除紧急妥善处理外,应按规定及时、如实上报主管部门及当地特种设备安全监察部门。......
2023-11-22

设计压力大于或等于12.3MPa的气瓶称为高压气瓶,应采用无缝结构。气瓶的主体材料必须采用镇静钢,高压气瓶必须采用合金钢或优质碳素钢。制造焊接气瓶的材料必须具有良好的焊接性。还有公称容积为400L、800L,盛装液氯0.5t、1t的焊接气瓶等。当气瓶受到撞击时,防振圈能吸收能量,减少振动,同时还有保护瓶体漆层标记的作用。2)焊接钢瓶的结构。......
2023-11-22

第五十五条 特种设备安全监督管理部门的安全监察人员应当熟悉相关法律、法规、规章和安全技术规范,具有相应的专业知识和工作经验,并经国务院特种设备安全监督管理部门考核,取得特种设备安全监察人员证书。第六十条 国务院特种设备安全监督管理部门和省、自治区、直辖市特种设备安全监督管理部门应当定期向社会公布特种设备安全以及能效状况。......
2023-11-22

当电梯因安全钳起作用轿厢不能移动时,则可打开轿顶安全窗退出,并通知有关检修人员进行检修。大部分老旧电梯由于产品制造的问题,控制柜、曳引系统和安全部件都不符合目前的法规要求,因此,可靠性差、故障多、事故频发,存在严重安全隐患。电梯的制造单位及改造单位均为某电梯有限公司。......
2023-11-22
小车自重的减轻使起重机主梁截面亦随之减小,因而整机自重大幅度减轻。法国Patain公司采用了一种以板材为基本构件的小车架结构,其重量轻,加工方便,适用于中、轻级中小吨位的起重机。堆垛机把要加工的工件送到发货台,然后由单轨起重小车吊起,按计算机的指令发送到指定工位进行加工。遥控起重机械随着生产发展需要量也越来越大。......
2023-11-22

8.5.7 事故应急预案与异常情况、隐患和事故处理8.5.7.1 事故应急救援预案充装单位应当按照有关规定制定事故应急救援预案,并且每年至少组织一次事故应急演练并记录。......
2023-06-20
相关推荐