基金会现场总线,是在过程自动化领域得到广泛支持和具有良好发展前景的技术。屈于用户的压力,这两大集团于1994年9月合并,成立了现场总线基金会,致力于开发出国际上统一的现场总线协议。基金会现场总线分低速H1和高速H2两种通信速率。H1的传输速率为31.25 kbit/s,通信距离可达1900 m,可支持总线供电,支持本质安全防爆环境。H2总线标准也已形成。......
2023-11-22
控制卡采用嵌入式操作系统μC/OS-Ⅱ,该软件的开发具有确定的开发流程。软件的开发流程甚至与任务的多少、任务的功能无关。在μC/OS-Ⅱ环境下,软件的开发流程如图11-13所示。
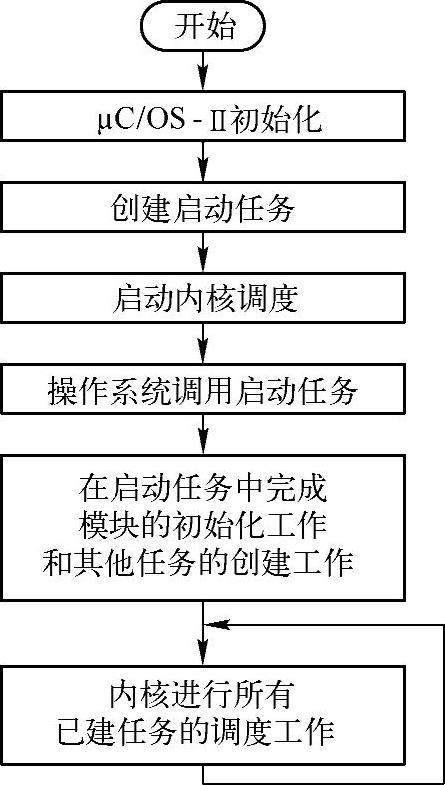
图11-13 μC/OS-Ⅱ环境下软件的开发流程
在该开发流程中,除了启动任务及其功能是确定的之外,其他任务的任务数目及功能甚至可以不确定。但是开发流程中的开发顺序是确定的,不能随意更改。
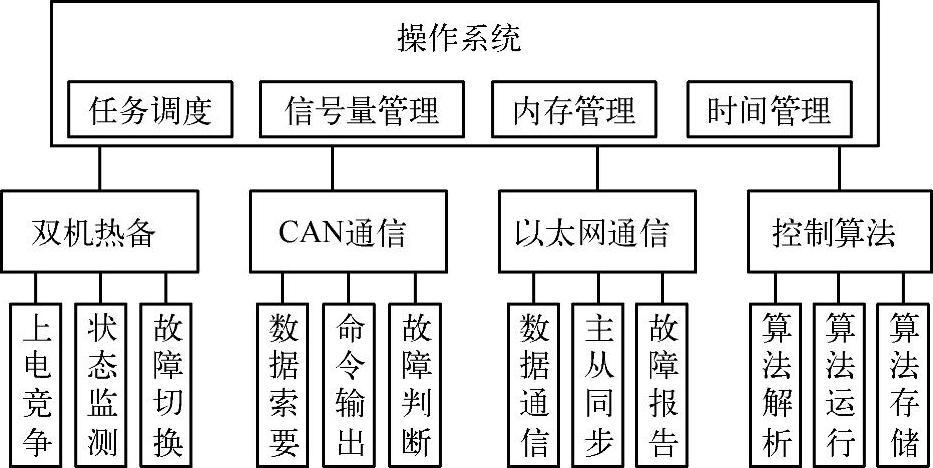
控制卡软件中涉及的内容除操作系统μC/OS-Ⅱ外,应用程序大致可分为4个主要模块,分别为双机热备、CAN通信、以太网通信和控制算法。控制卡软件涉及的主要模块如图11-14所示。
 (www.chuimin.cn)
(www.chuimin.cn)
图11-14 控制卡软件涉及的主要模块
嵌入式操作系统μC/OS-Ⅱ中程序的执行顺序与程序代码的位置无关,只与程序代码所在任务的优先级有关。所以,在嵌入式操作系统μC/OS-Ⅱ环境下的软件框架设计,实际上就是确定各个任务的优先级安排。优先级的安排会根据任务的重要程度以及任务间的前后衔接关系来确定。以CAN通信任务与控制算法运行任务为例,控制算法运行所需要的输入信息是由CAN通信任务向测控板卡索要的,所以CAN通信任务要优先于控制算法任务执行,CAN通信任务拥有更高的优先级。控制卡软件中的任务及优先级见表11-3。
表11-3 控制卡软件中的任务及优先级
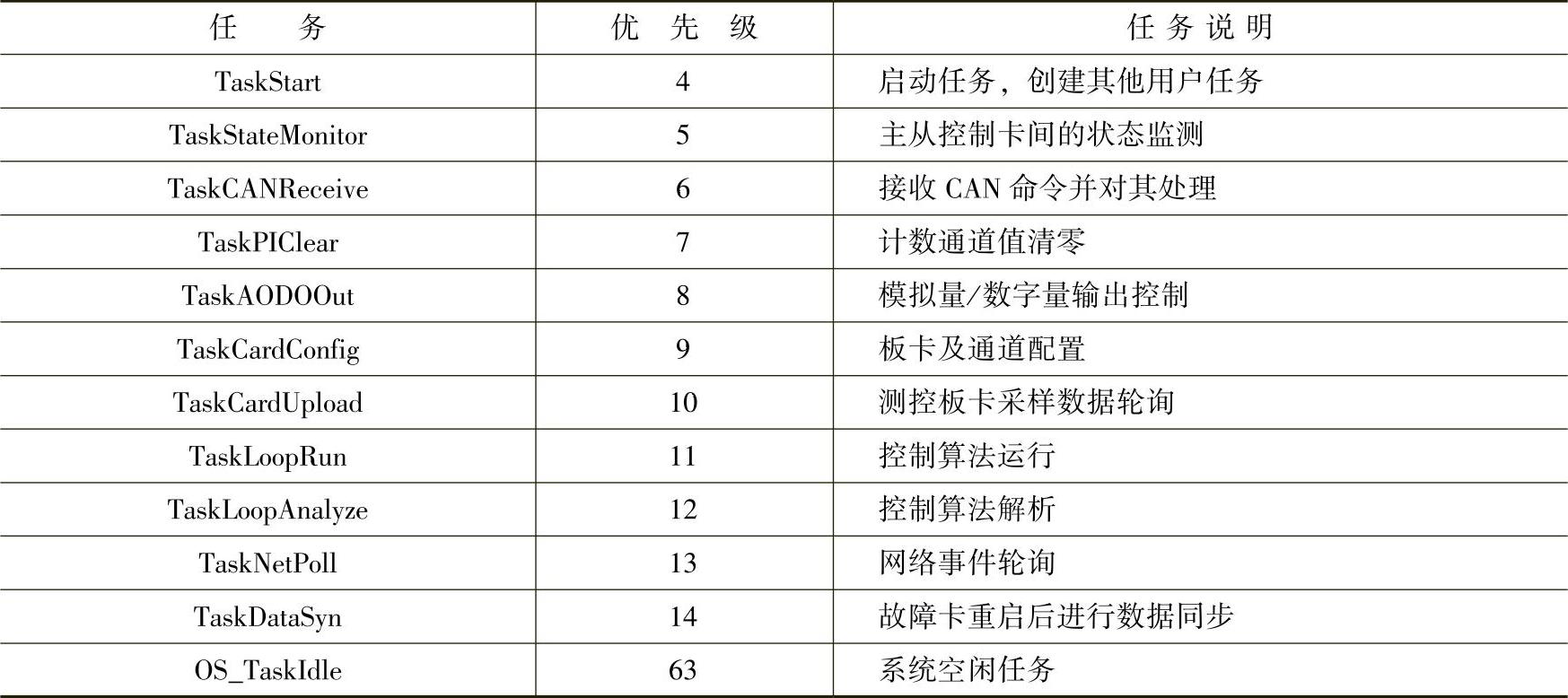
确定了各个任务的优先级就确定了系统软件的整体框架。但是使用嵌入操作系统μC/ OS-Ⅱ,并不表示所有的事情都要以任务的形式完成。为了增加对事件响应的实时性,部分功能必须通过中断实现,如CAN接收中断和以太网接收中断。而且,μC/OS-Ⅱ也提供对中断的支持,允许在中断函数中调用部分系统服务,如用于释放信号量的OSSemPost()等。
有关现场总线及其应用技术的文章

基金会现场总线,是在过程自动化领域得到广泛支持和具有良好发展前景的技术。屈于用户的压力,这两大集团于1994年9月合并,成立了现场总线基金会,致力于开发出国际上统一的现场总线协议。基金会现场总线分低速H1和高速H2两种通信速率。H1的传输速率为31.25 kbit/s,通信距离可达1900 m,可支持总线供电,支持本质安全防爆环境。H2总线标准也已形成。......
2023-11-22

4)PCI9052的局部总线与PCI总线的时钟相互独立运行。5)4个局部设备片选信号。图5-35 LON网络智能适配器系统组成示意图图5-35中,MODE接地,表示局部总线采用了非复用模式;LHOLD接地,表示PCI9052一直是局部总线的主控设备,掌握对局部总线的控制权,也就是说,可以主动对双口RAM进行读或写。PCI9052有5个局部地址空间,可以任意选取。......
2023-11-22
PCI总线是由Intel公司提出的。PCI总线不是由ANSI通过的标准,但由于它是由厂家自发制定执行的标准,具有众多的优点,拥护者,执行者众多,成了事实上的标准。PCI总线共有100个引脚,如果只作为目标设备,至少需要47条,如作为主设备则需要49条。本设计使用位命令字,其定义如下:3.PCI总线基本协议PCI上的基本总线传输机制是突发成组传输。......
2023-11-22

由于TMS320LF2407A是定点DSP,用C语言实现快速傅里叶变换不必考虑定点数定标的问题,也不必担心定点数溢出的问题,C语言有float型变量,其取值范围为1.19209290e-38~1.19209290e+38,完全可以满足快速傅里叶计算的量程范围。由任务要求可知,软件设计的重点是电网电压、电流的数据采集和数据处理,这些程序设计的优劣直接影响仪表的测量精度和运算速度。软件设计主要包括数据采集、数据处理和数据通信几部分。......
2023-11-20

现场总线控制网络处于企业网络的底层,或者说,它是构成企业网络的基础。从图中可以看出,除现场的控制网络外,上面的ERP和MES都采用以太网。图中的ERP与MES功能层大多采用以太网技术构成数据网络,网络节点多为各种计算机及外设。控制网络的主要作用是为自动化系统传递数字信息。这些都需要在现场控制层内部,在FCS与MES、ERP各层之间,方便地实现数据传输与信息共享。......
2023-11-22

WorldFIP技术硬件体系由两个互补的部分组成:通信控制器和通信介质器件。5)用于WorldFIP连接的费用要求。WorldFIP现场总线第一个通信控制器是在1987年开发成功的。图8-9 WorldFIP现场总线通信站的连接......
2023-11-22
表4-20 通信距离与通信波特率关系表(续)CAN接收子程序1)程序流程图。图4-35 CAN接收子程序流程图2)程序清单。图4-36 CAN发送子程序流程图2.PeliCAN程序设计初始化子程序程序清单如下:入口条件:波特率控制字存入NBTR0和NBTR1中。......
2023-11-22

INTERBUS定义了该模型的第1、2、7层。INTERBUS具有强大的可靠性、可诊断性和易维护性。INTERBUS采用了集总帧型的数据环通信。强大的诊断功能是INTERBUS区别于其他总线所独有的。INTERBUS CLUB负责向设备生产厂家提供INTERBUS的接口方案和接口芯片,向其成员提供信息,帮助解决技术问题及为特定的应用找寻合适的INTERBUS产品。INTERBUS的技术发起人为德国菲尼克斯公司。另外,在美国和中国也设有INTERBUS技术中心。......
2023-11-22
相关推荐