【摘要】:EtherCAT包括以下几种应用层协议:1.CANopen over EtherCATCANopen最初是为基于CAN总线的系统所制定的应用层协议。EtherCAT协议在应用层支持CANopen协议,并做了相应的扩充,其主要功能有:1)使用邮箱通信访问CANopen对象字典及其对象,实现网络初始化。图10-5 EtherCAT协议结构2)使用CANopen应急对象和可选的事件驱动PDO消息,实现网络管理。EtherCAT能分段传输标准以太网协议数据帧,并在相关的设备完成组装。
应用层AL(Application Layer)是EtherCAT协议最高的一个功能层,是直接面向控制任务的一层,它为控制程序访问网络环境提供手段,同时为控制程序提供服务。应用层不包括控制程序,它只是定义了控制程序和网络交互的接口,使符合此应用层协议的各种应用程序可以协同工作,EtherCAT协议结构如图10-5所示。
EtherCAT包括以下几种应用层协议:
1.CANopen over EtherCAT(CoE)
CANopen最初是为基于CAN总线的系统所制定的应用层协议。EtherCAT协议在应用层支持CANopen协议,并做了相应的扩充,其主要功能有:
1)使用邮箱通信访问CANopen对象字典及其对象,实现网络初始化。
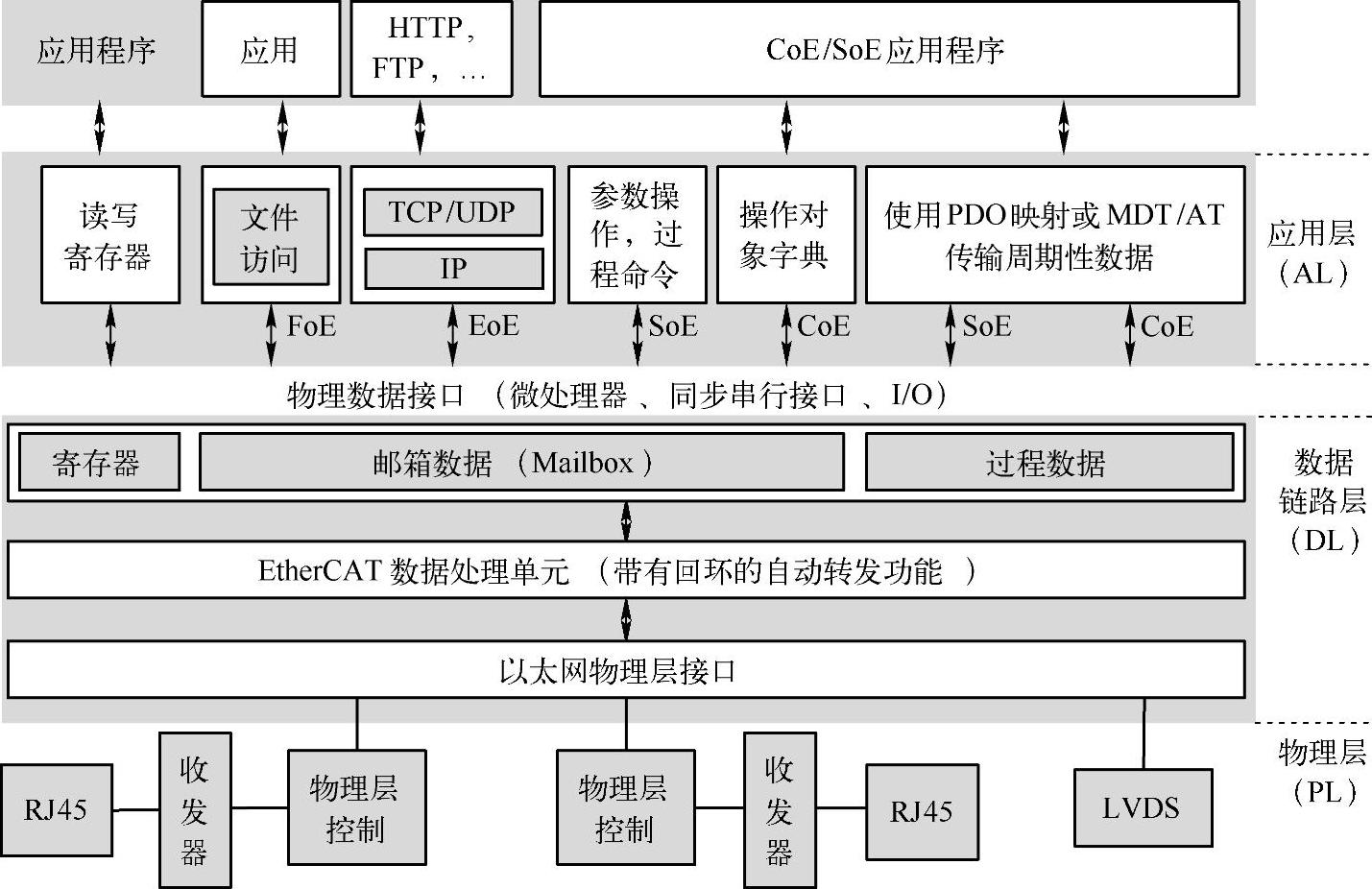
图10-5 EtherCAT协议结构
2)使用CANopen应急对象和可选的事件驱动PDO消息,实现网络管理。
3)使用对象字典映射过程数据,周期性传输指令数据和状态数据。
CoE协议完全遵从CANopen协议,其对象字典的定义也相同,针对EtherCAT通信扩展了相关通信对象0x1C00~0x1C4F,用于设置存储同步管理器的类型、通信参数和PDO数据分配。(www.chuimin.cn)
2.Servo Drive over EtherCAT(SoE)
IEC 61491是国际上第一个专门用于伺服驱动器控制的实时数据通信协议标准,其商业名称为SERCOS(Serial Real-time Communication Specification)。EtherCAT协议的通信性能非常适合数字伺服驱动器的控制,应用层使用SERCOS应用层协议实现数据接口,可以实现以下功能:
1)使用邮箱通信访问伺服控制规范参数(IDN),配置伺服系统参数。
2)使用SERCOS数据电报格式配置EtherCAT过程数据报文,周期性传输伺服指令数据和伺服状态数据。
3.Ethernet over EtherCAT(EoE)
除了前面描述的主从站设备之间的通信寻址模式外,EtherCAT也支持IP标准的协议,比如TCP/IP、UDP/IP和所有其他高层协议(HTTP和FTP等)。EtherCAT能分段传输标准以太网协议数据帧,并在相关的设备完成组装。这种方法可以避免为长数据帧预留时间片,大大缩短周期性数据的通信周期。此时,主站和从站需要相应的EoE驱动程序支持。
4.File Access over EtherCAT(FoE)
该协议通过EtherCAT下载和上传固定程序和其他文件,其使用类似TFTP(Trivial File Transfer Protocol,简单文件传输协议)的协议,不需要TCP/IP的支持,实现简单。






相关推荐