【摘要】:块模式是所有块都有的重要参数,它决定块运行的状态,也能反映块应用的一些错误。3)本地跨越Local Override:控制模块在这个模式时的输出跟踪一个TRK_VAL输入参数。Auto、Cas和Rcas模式是自动地按算法计算功能块输出,Iman、LO、Man和Rout模式则是需要“手动”输出。3)允许Permitted:允许功能块使用的模式种类。表7-3 模式的优先级别
块模式是所有块都有的重要参数,它决定块运行的状态,也能反映块应用的一些错误。
1.模式的类型
1)未服务Out of Service(O/S):功能块未运行,块输出值保持在最后值。对于输出类功能块,输出值保持在最后值或者由组态所指定的故障状态值。设定值保持在最后值。
2)初始化手动Initialization Manual(Iman):串级结构的下游功能块不在串级模式(Cas),因此正常的算法不被执行,块输出仅跟随一个来自下游功能块的外部跟踪信号(BKCAL IN)。此模式下不能通过目标模式请求。
3)本地跨越Local Override(LO):控制模块在这个模式时的输出跟踪一个TRK_VAL输入参数。输出功能块在故障状态时也可以在LO模式。这个模式也不能通过目标模式请求。
4)手动Manual(Man):功能块的输出不是被计算出的,虽然它可能被限制,但操作员可以直接给出功能块的输出值。
5)自动Automatic(Auto):功能块的输出是被计算出的。它将使用操作员通过接口设备给出的本地设定值。
6)串级Cascade(Cas):设定值通过链接(Cas_IN)来自其他块,因此操作员不能直接改变。功能块在设定值基础上计算出输出。为了达到这个模式,算法使用CAS_IN输入和BKCAL_OUT输出和上游块构成一个无扰动方式的串级。
7)远程串级Remote Cascade(Rcas):功能块的设定值是由接口设备(计算机、DCS/ PLC)中控制应用的RCAS_IN参数给定。
8)远程输出Remote Output(Rout):功能块的输出是由接口设备中控制应用的ROUT_ IN参数给定。为了达到这个模式,算法使用ROUT IN输入和ROUT OUT输出和接口设备构成一个无扰动方式的串级关系,因此接口设备中控制应用类似于“上层块”,但它们没有功能块间连接那样的调度和同步关系。
Auto、Cas和Rcas模式是自动地按算法计算功能块输出,Iman、LO、Man和Rout模式则是需要“手动”输出。
2.MODE_BLK的元素(www.chuimin.cn)
1)目标Target:操作员选择功能块的目标模式。在所允许选择的模式中只能选一个。
2)现实Actual:现行的功能块模式。在某些运行条件或组态下(如输入状态坏或旁路)也可能和目标模式不一样。现实模式是功能块执行模式计算的结果,所以操作员不能选择现实模式。
3)允许Permitted:允许功能块使用的模式种类。它可以基于应用的需要由用户来组态,所以这像一个从支持的模式中选择出的模式列表。
4)正常Normal:仅用于记忆功能块正常运行条件下的模式。它不影响功能块计算。
5)保留目标模式:当目标模式为O/S、Man、Rcas和Rout时,目标模式属性可能保留以前目标模式的有关信息,这个信息可能用于功能块模式脱落(Shedding)和设定值跟踪。
3.模式优先级别
模式优先级别的概念用于功能块计算现实模式,或决定对一个特别的或更高优先级别模式是否允许写访问。
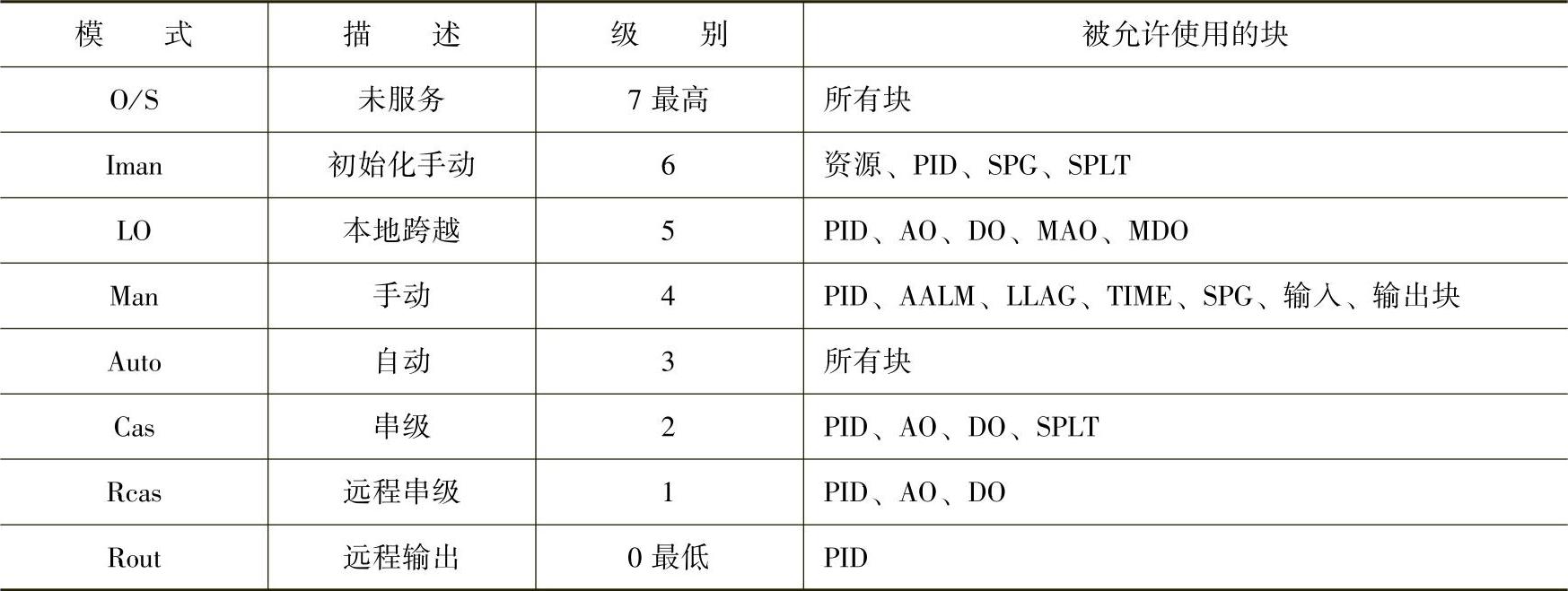
模式优先级别见表7-3。
表7-3 模式的优先级别





相关推荐