控制器局域网为串行通信协议,能有效地支持具有很高安全等级的分布实时控制。CAN的应用范围很广,从高速的网络到低价位的多路接线都可以使用CAN。在汽车电子行业里,使用CAN连接发动机控制单元、传感器及防刹车系统等,其传输速率可达1 Mbit/s。同时,可以将CAN安装在卡车本体的电子控制系统里,诸如车灯组、电气车窗等,用以代替接线配线装置。制订技术规范的目的是为了在任何两个CAN仪器之间建立兼容性。......
2023-11-22
目前汽车上的网络连接方式主要采用两条CAN,一条用于动力系统的高速CAN,传输速率达到500 kbit/s;另一条用于车身系统的低速CAN,速率是100 kbit/s。动力系统CAN主要连接对象是发动机电控单元(ECU)、变速箱、ABS控制器和安全气囊控制器等,它们的基本特征相同,都是控制与汽车行驶直接相关的系统。车身系统CAN主要连接和控制汽车内外部照明、灯光信号、空调、组合仪表及其他辅助电器等。目前,动力系统CAN之间的资源共享,并将各个数据总线的信息反馈到仪表盘上。驾车者只要看仪表板,就可以知道各个电控装置是否正常工作。
汽车计算机控制已经涉及动力性、经济性、安全性、可靠性、净化性和舒适性等诸多方面,具体包括发动机控制、变速器控制、巡航控制、制动控制、照明控制、空调控制、雨刷控制和仪表管理系统等,而且各种控制系统的电控单元(ECU)相互联系紧密,需要随时进行实时数据通信。CAN总线作为一种极具应用潜力的控制器局域网总线,近年来在汽车计算机控制系统中得到越来越广泛的应用,并已成为欧洲汽车制造业主体行业标准,代表着汽车电子控制网络的主流发展趋势。
汽车计算机控制系统中的所有这些子控制系统通过CAN总线构成一个实时控制系统网络,各控制单元的指令发出去之后,必须保证在一定时间内得到响应,否则就有可能发生重大事故,这就要求汽车上的CAN通信网络有较高的波特率和可靠性。而且,汽车在实际运行过程中,众多节点之间需要进行大量的实时数据交换。若整辆汽车的所有节点都挂在一个CAN网络上,这么多节点通过一条CAN总线进行通信,信息管理配置稍有不当,就很容易出现总线负荷过大,将导致系统实时响应速度下降,这在实时系统中是不允许的。因此在对汽车上各节点的实时性进行分析之后,根据各节点对实时性的要求,设计了高、低两个传输速率不同的CAN通信网络。将实时性要求严格、可靠性要求高的节点组成高速CAN通信网络,将其他实时性要求相对较低的节点组成低速CAN通信网络,并架设网关将这两个传输速率不同的CAN通信网络连接起来,实现全部节点之间的数据共享。汽车CAN网络拓扑结构如图4-65所示。(www.chuimin.cn)
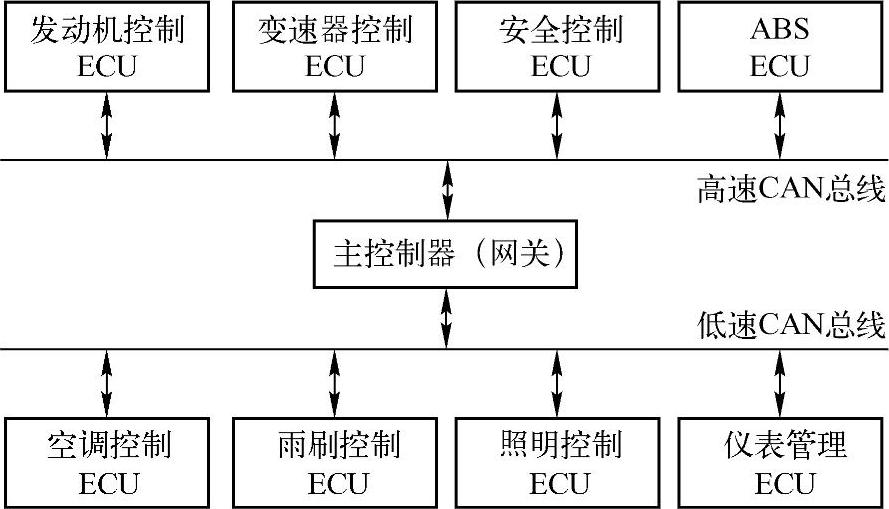
图4-65 汽车CAN网络拓扑结构
有关现场总线及其应用技术的文章

控制器局域网为串行通信协议,能有效地支持具有很高安全等级的分布实时控制。CAN的应用范围很广,从高速的网络到低价位的多路接线都可以使用CAN。在汽车电子行业里,使用CAN连接发动机控制单元、传感器及防刹车系统等,其传输速率可达1 Mbit/s。同时,可以将CAN安装在卡车本体的电子控制系统里,诸如车灯组、电气车窗等,用以代替接线配线装置。制订技术规范的目的是为了在任何两个CAN仪器之间建立兼容性。......
2023-11-22
基金会现场总线,是在过程自动化领域得到广泛支持和具有良好发展前景的技术。屈于用户的压力,这两大集团于1994年9月合并,成立了现场总线基金会,致力于开发出国际上统一的现场总线协议。基金会现场总线分低速H1和高速H2两种通信速率。H1的传输速率为31.25 kbit/s,通信距离可达1900 m,可支持总线供电,支持本质安全防爆环境。H2总线标准也已形成。......
2023-11-22

INTERBUS定义了该模型的第1、2、7层。INTERBUS具有强大的可靠性、可诊断性和易维护性。INTERBUS采用了集总帧型的数据环通信。强大的诊断功能是INTERBUS区别于其他总线所独有的。INTERBUS CLUB负责向设备生产厂家提供INTERBUS的接口方案和接口芯片,向其成员提供信息,帮助解决技术问题及为特定的应用找寻合适的INTERBUS产品。INTERBUS的技术发起人为德国菲尼克斯公司。另外,在美国和中国也设有INTERBUS技术中心。......
2023-11-22

CAN通信转换器可以将RS-232、RS-485或USB串行口转换为CAN现场总线。2)可方便地实现RS-232接口与CAN总线的转换。4)CAN总线波特率可选,最高可达1 Mbit/s。JP2.6~JP2.4用于设定CAN波特率,见表4-23。......
2023-11-22

AMIS-42700可以在12V和24V的系统中使用。由于接收输入的宽共模电压范围,AMIS-42700具有非常优秀的电磁敏感性。AMIS-42700具有如下特点:1)完全符合ISO 11898-2标准。图4-31 AMIS-42700引脚图图4-32 AMIS-42700 CAN总线扩展应用电路......
2023-11-22

4)PCI9052的局部总线与PCI总线的时钟相互独立运行。5)4个局部设备片选信号。图5-35 LON网络智能适配器系统组成示意图图5-35中,MODE接地,表示局部总线采用了非复用模式;LHOLD接地,表示PCI9052一直是局部总线的主控设备,掌握对局部总线的控制权,也就是说,可以主动对双口RAM进行读或写。PCI9052有5个局部地址空间,可以任意选取。......
2023-11-22

PCI总线是由Intel公司提出的。PCI总线不是由ANSI通过的标准,但由于它是由厂家自发制定执行的标准,具有众多的优点,拥护者,执行者众多,成了事实上的标准。PCI总线共有100个引脚,如果只作为目标设备,至少需要47条,如作为主设备则需要49条。本设计使用位命令字,其定义如下:3.PCI总线基本协议PCI上的基本总线传输机制是突发成组传输。......
2023-11-22

现场总线控制网络处于企业网络的底层,或者说,它是构成企业网络的基础。从图中可以看出,除现场的控制网络外,上面的ERP和MES都采用以太网。图中的ERP与MES功能层大多采用以太网技术构成数据网络,网络节点多为各种计算机及外设。控制网络的主要作用是为自动化系统传递数字信息。这些都需要在现场控制层内部,在FCS与MES、ERP各层之间,方便地实现数据传输与信息共享。......
2023-11-22
相关推荐