基金会现场总线,是在过程自动化领域得到广泛支持和具有良好发展前景的技术。屈于用户的压力,这两大集团于1994年9月合并,成立了现场总线基金会,致力于开发出国际上统一的现场总线协议。基金会现场总线分低速H1和高速H2两种通信速率。H1的传输速率为31.25 kbit/s,通信距离可达1900 m,可支持总线供电,支持本质安全防爆环境。H2总线标准也已形成。......
2023-11-22
1.BasicCAN程序设计
CAN应用节点的程序设计主要分为三部分:初始化子程序、发送子程序和接收子程序。
(1)CAN初始化程序
1)程序流程图。CAN初始化子程序流程图如图4-34所示。
2)程序清单。CAN初始化子程序清单如下:


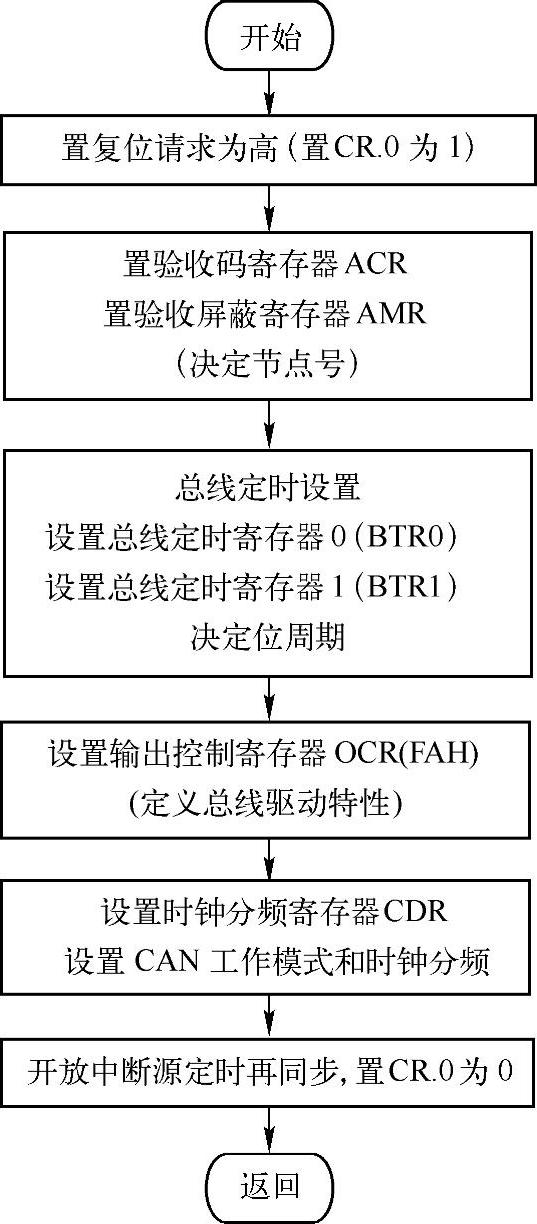
图4-34 CAN初始化子程序流程图
入口条件:将本节点号存入NODE单元。
波特率控制字存入NBTR0和NBTR1单元。
出口:无。


3)通信波特率的计算。假设BTR0=43H,BTR1=2FH,计算通信波特率。通信波特率由BTR0和BTR1决定。
①BTR0各位功能如下:

系统时钟tSCL的计算:
tSCL=2tCLK(32BRP.5+16BRP.4+8BRP.3+4BRP.2+2BRP.1+BRP.0+1)
BTR0=43H=01000011B
本例中,

同步跳转宽度的计算:
为补偿不同总线控制器时钟振荡器之间的相移,任何总线控制器必须同步于当前进行发送的相关信号沿。
TSJW=tSCL×(2SJW.1+SJW.0+1)=tSCL×(0+1+1)=2tSCL
②BTR1各位功能如下:

根据BTR1计算tTSEG1和tTSEG2:
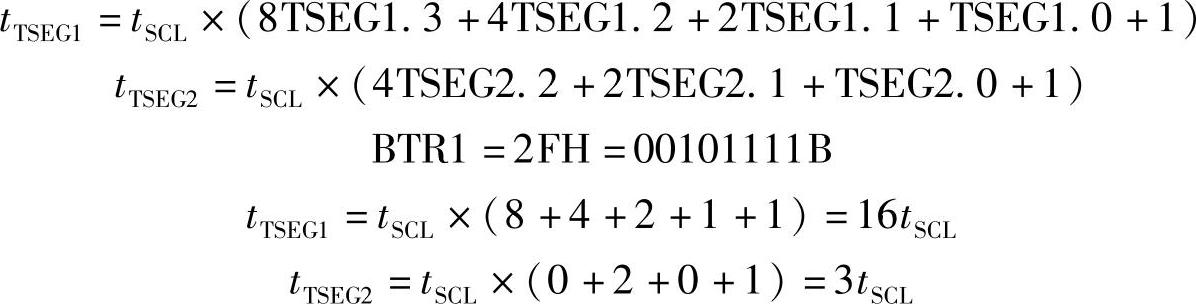
③位周期:

在CAN总线系统的实际应用中,经常会遇到要估算一个网络的最大总线长度和节点数的情况。下面分析当采用PCA82C250作为总线驱动器时,影响网络的最大总线长度和节点数的相关因素以及估算的方法。若采用其他驱动器,也可以参照该方法进行估算。
由CAN总线所构成的网络,其最大总线长度主要由以下三个方面的因素所决定:
1)互连总线节点间的回路延时(由CAN总线控制器和驱动器等引入)和总线线路延时。
2)由于各节点振荡器频率的相对误差而导致的位时钟周期的偏差。
3)由于总线电缆串联等效电阻和总线节点的输入电阻而导致的信号幅度的下降。
传输延迟时间对总线长度的影响主要是由于CAN总线的特点(非破坏性总线仲裁和帧内应答)所决定的。比如,在每帧报文的应答场(ACK场),要求接收报文正确的节点在应答间隙将发送节点的隐性电平拉为显性电平,作为对发送节点的应答。由于这些过程必须在一个位时间内完成,所以总线线路延时以及其他延时之和必须小于1/2个位时钟周期。非破坏性总线仲裁和帧内应答本来是CAN总线区别于其他现场总线最显著的优点之一,在这里却成了一个缺点。缺点主要表现在其限制了CAN总线速度进一步提高的可能性,当需要更高的速度时则无法满足要求。
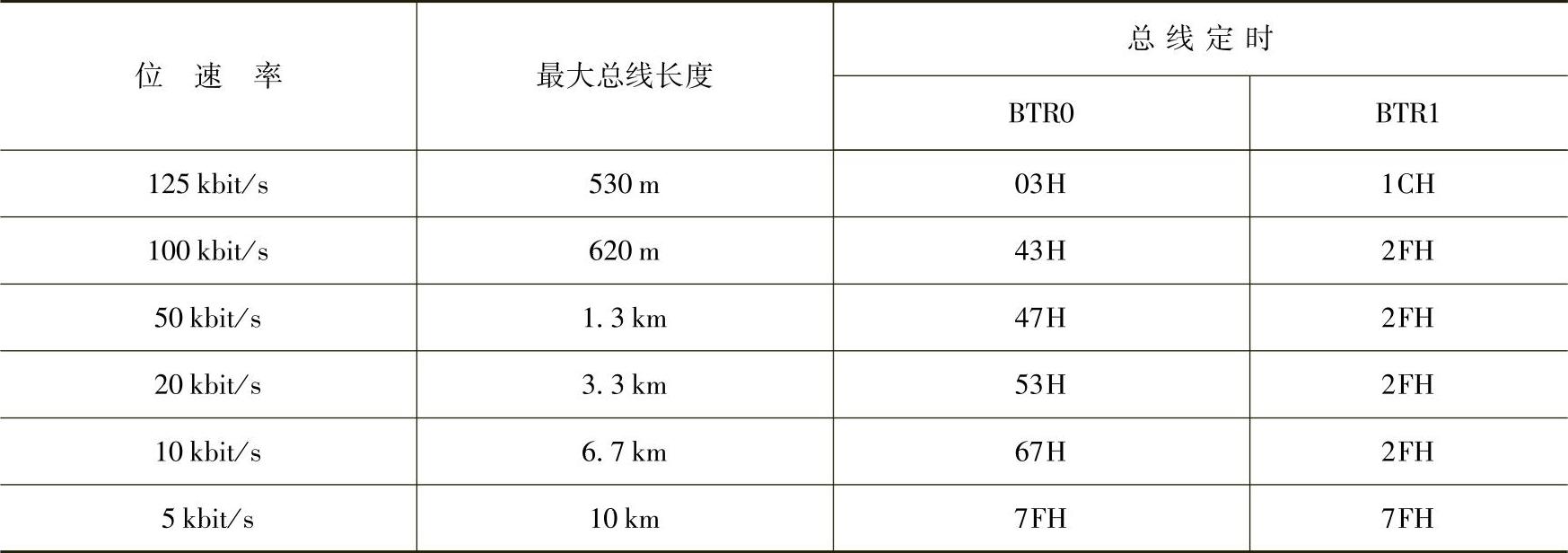
CAN任意两个节点之间的传输距离与其通信波特率有关,当采用Philips公司的SJA1000 CAN通信控制器时,并假设晶振频率为16 MHz,通信距离与通信波特率关系见表4-20。
表4-20 通信距离与通信波特率关系表

(续)
(2)CAN接收子程序(www.chuimin.cn)
1)程序流程图。CAN接收子程序流程图如图4-35所示。
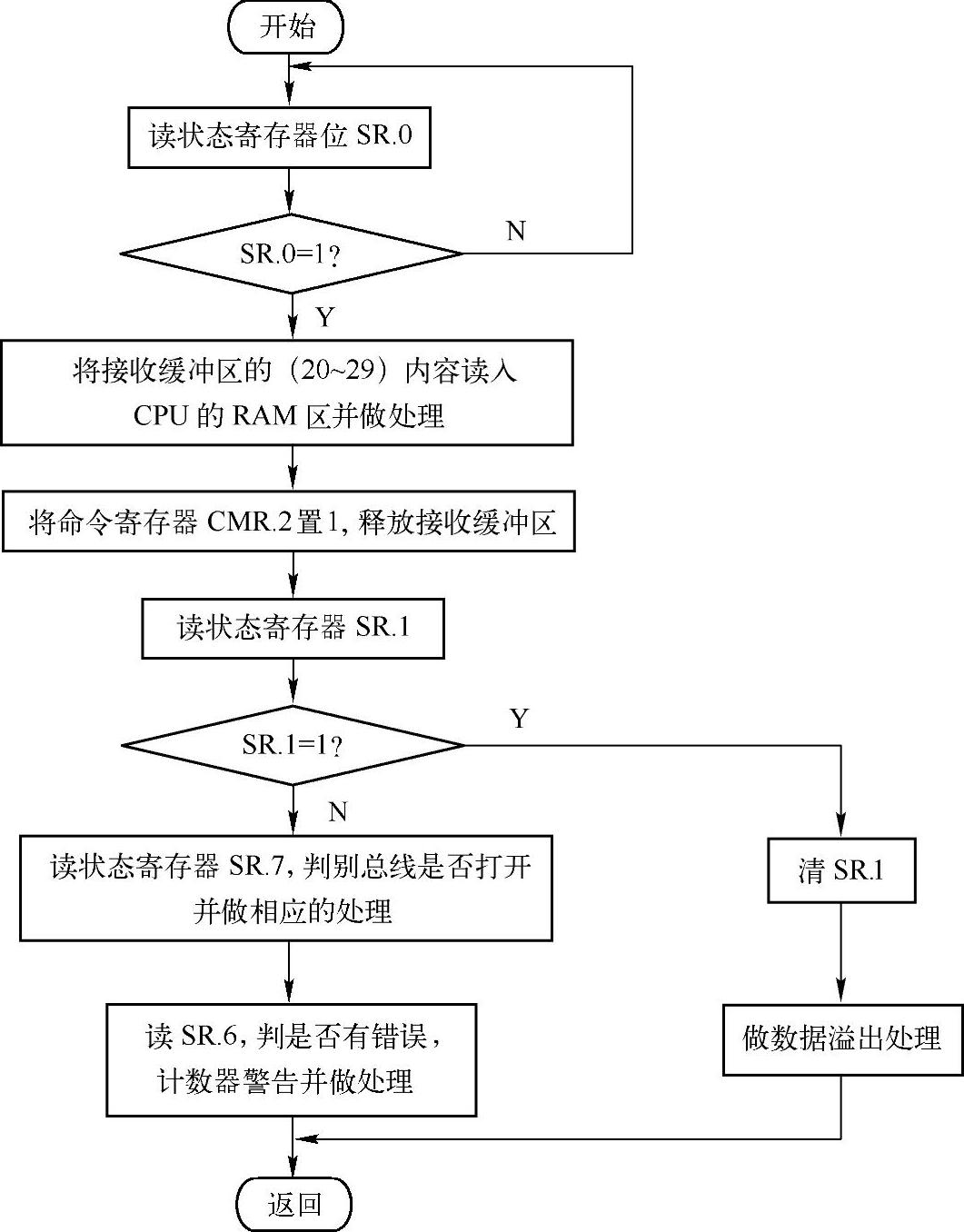
图4-35 CAN接收子程序流程图
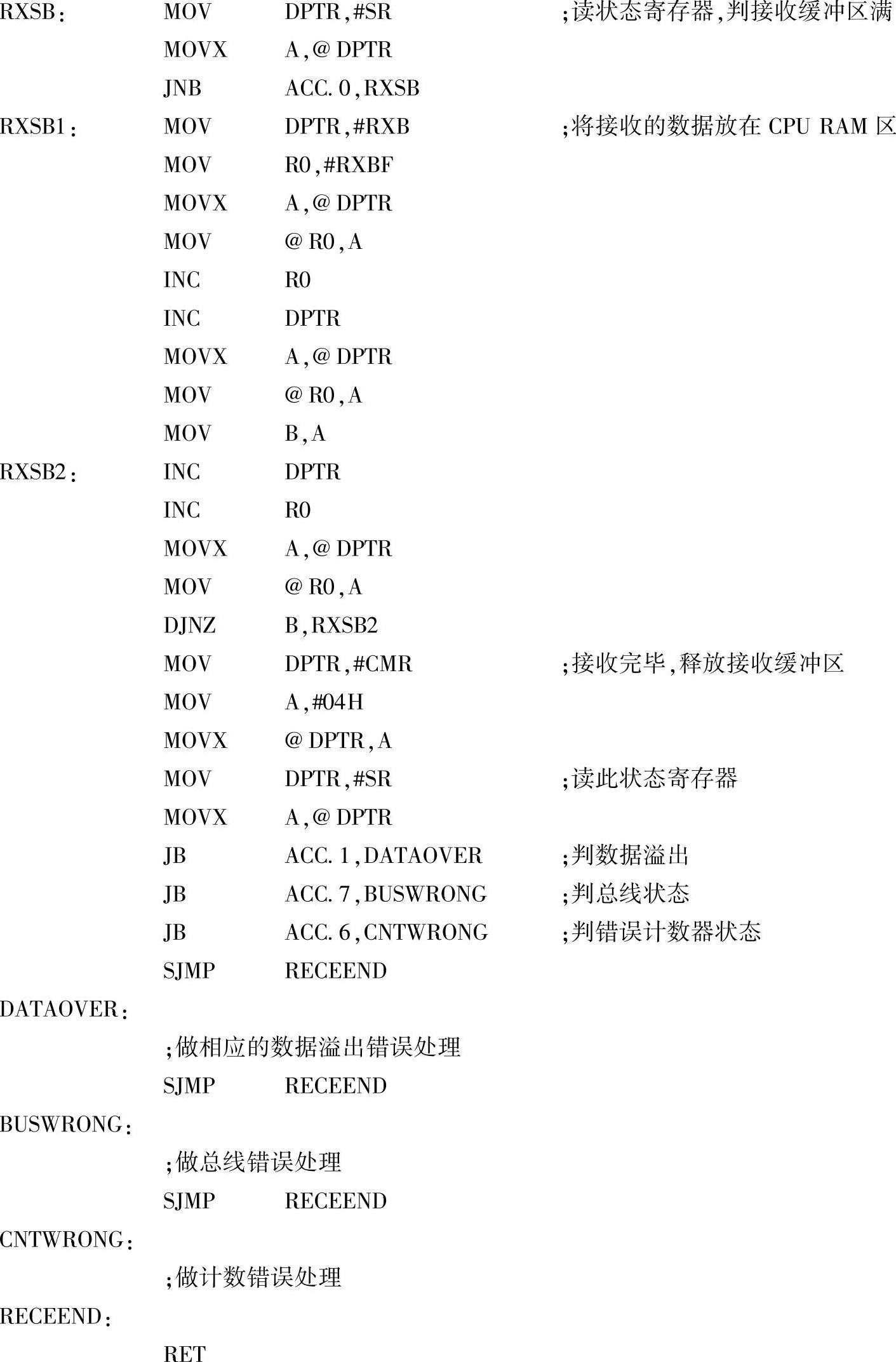
2)程序清单。CAN接收子程序清单如下:
入口条件:无。
出口:接收的描述符、数据长度及数据放在RXBF开始的缓冲区中。
(3)CAN发送子程序
1)程序流程图。CAN发送子程序流程图如图4-36所示。
2)程序清单。CAN发送子程序清单如下:
入口条件:将要发送的描述符存入TXBF;
将要发送的数据长度存入TXBF+1;
将要发送的数据存入TXBF+2开始的单元。
出口:无。
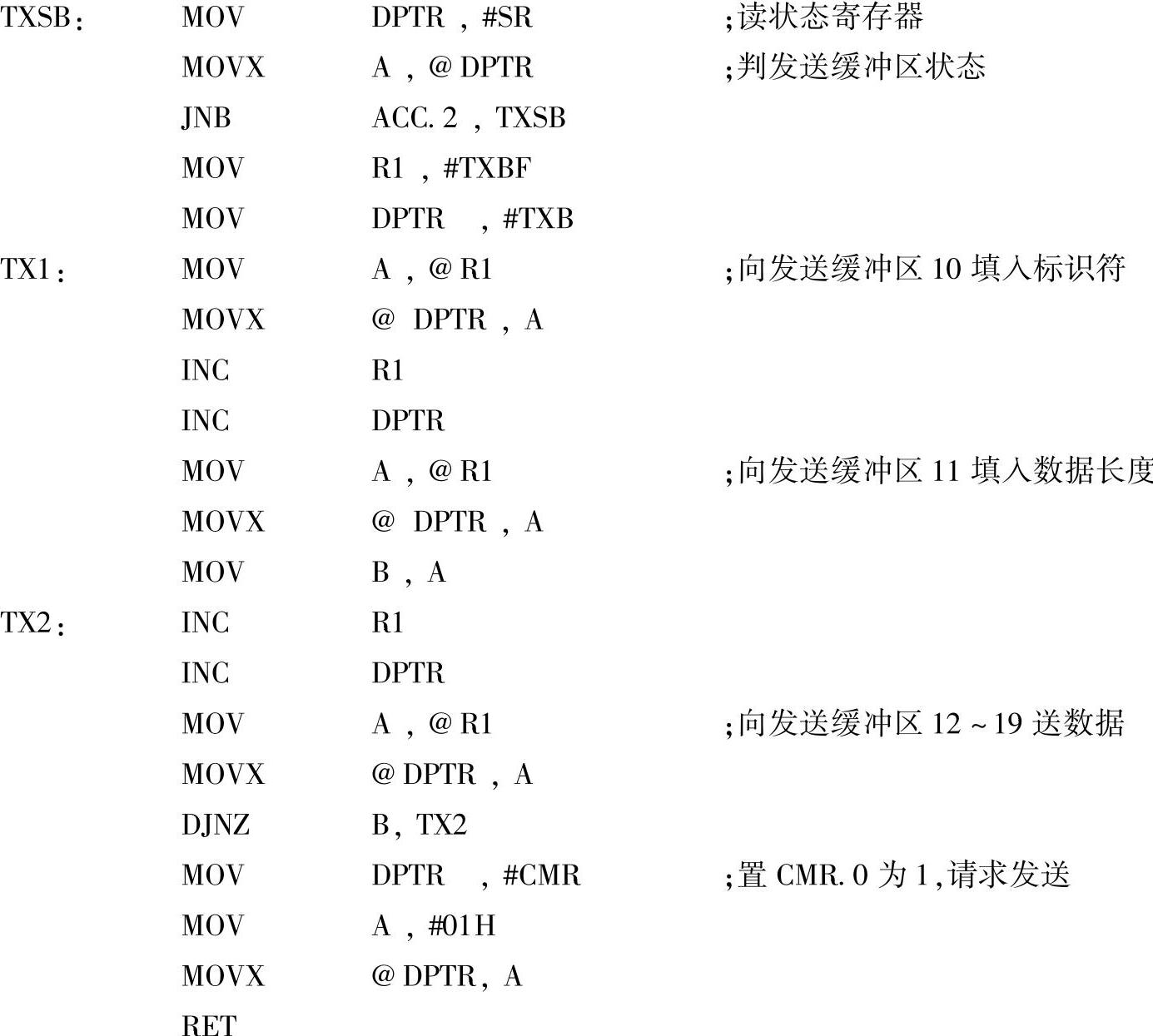

图4-36 CAN发送子程序流程图
2.PeliCAN程序设计
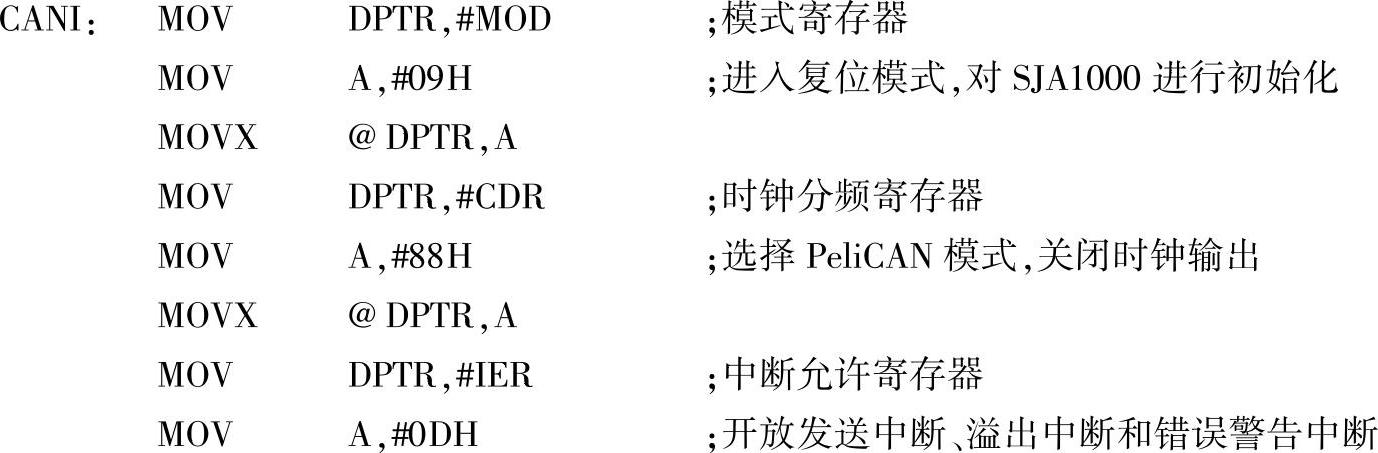
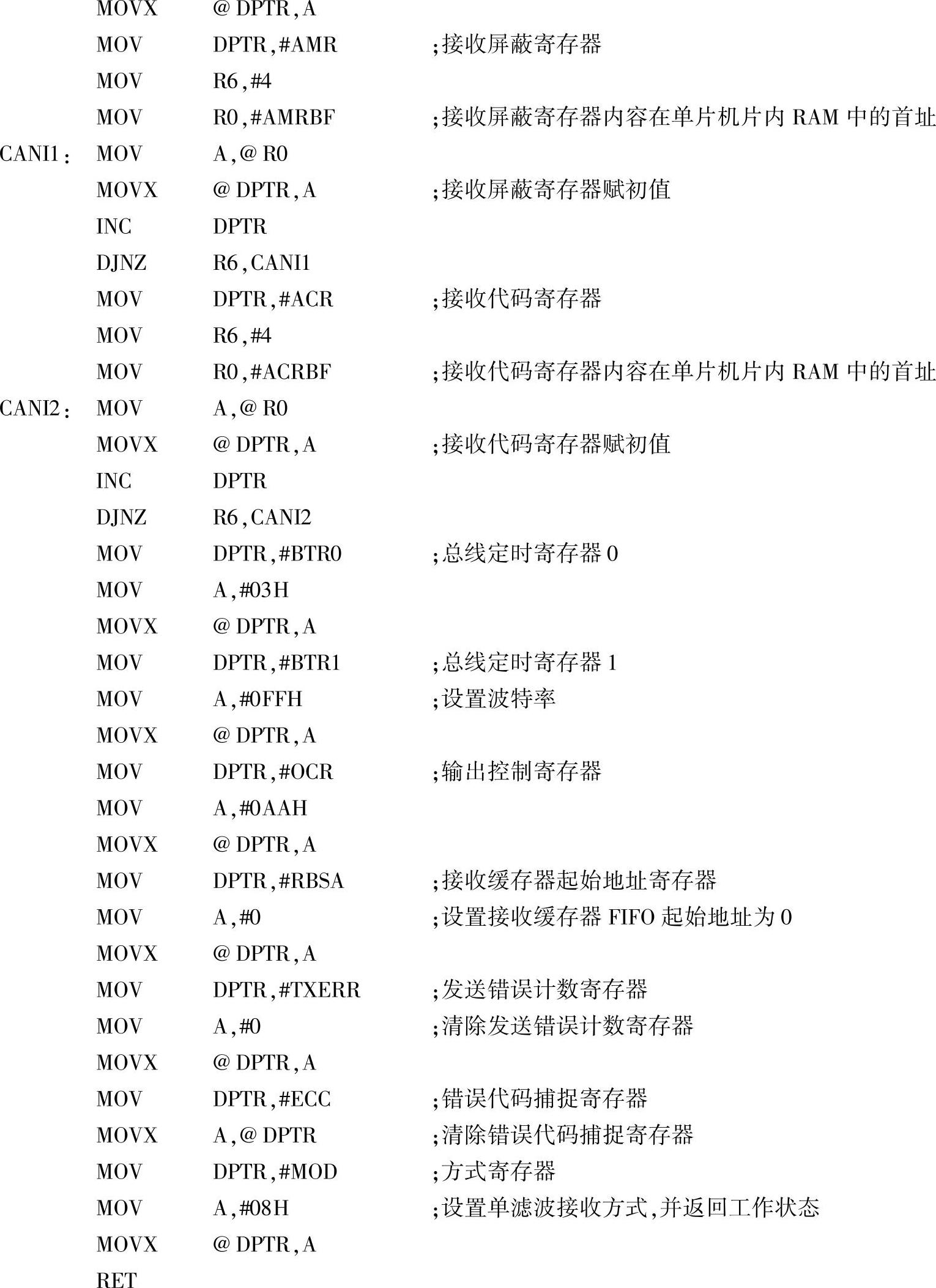
(1)初始化子程序
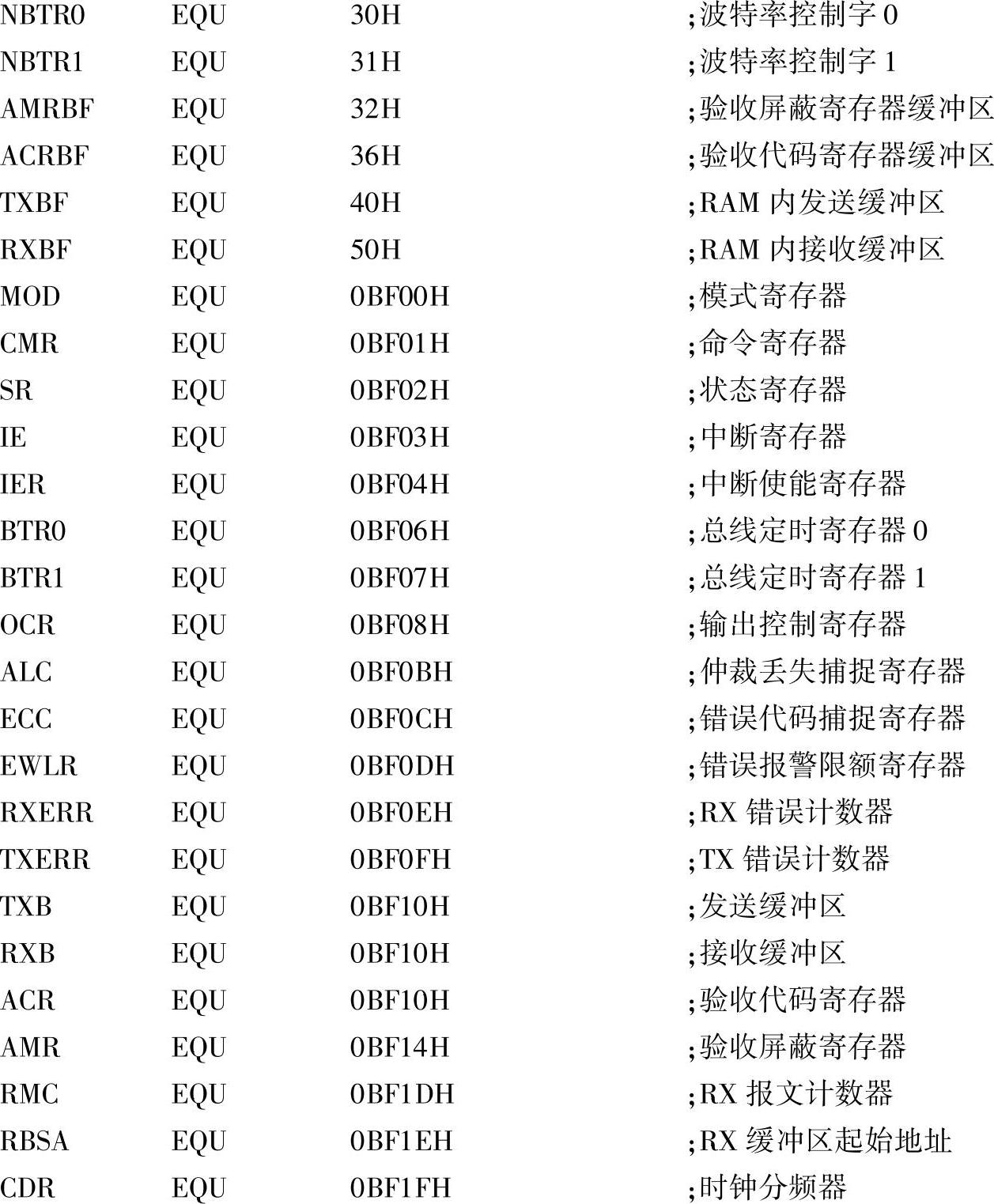
程序清单如下:
入口条件:波特率控制字存入NBTR0和NBTR1中。
验收代码寄存器内容在ACRBF开始的4个单元。
验收屏蔽寄存器内容在AMRBF开始的4个单元。
出口:无
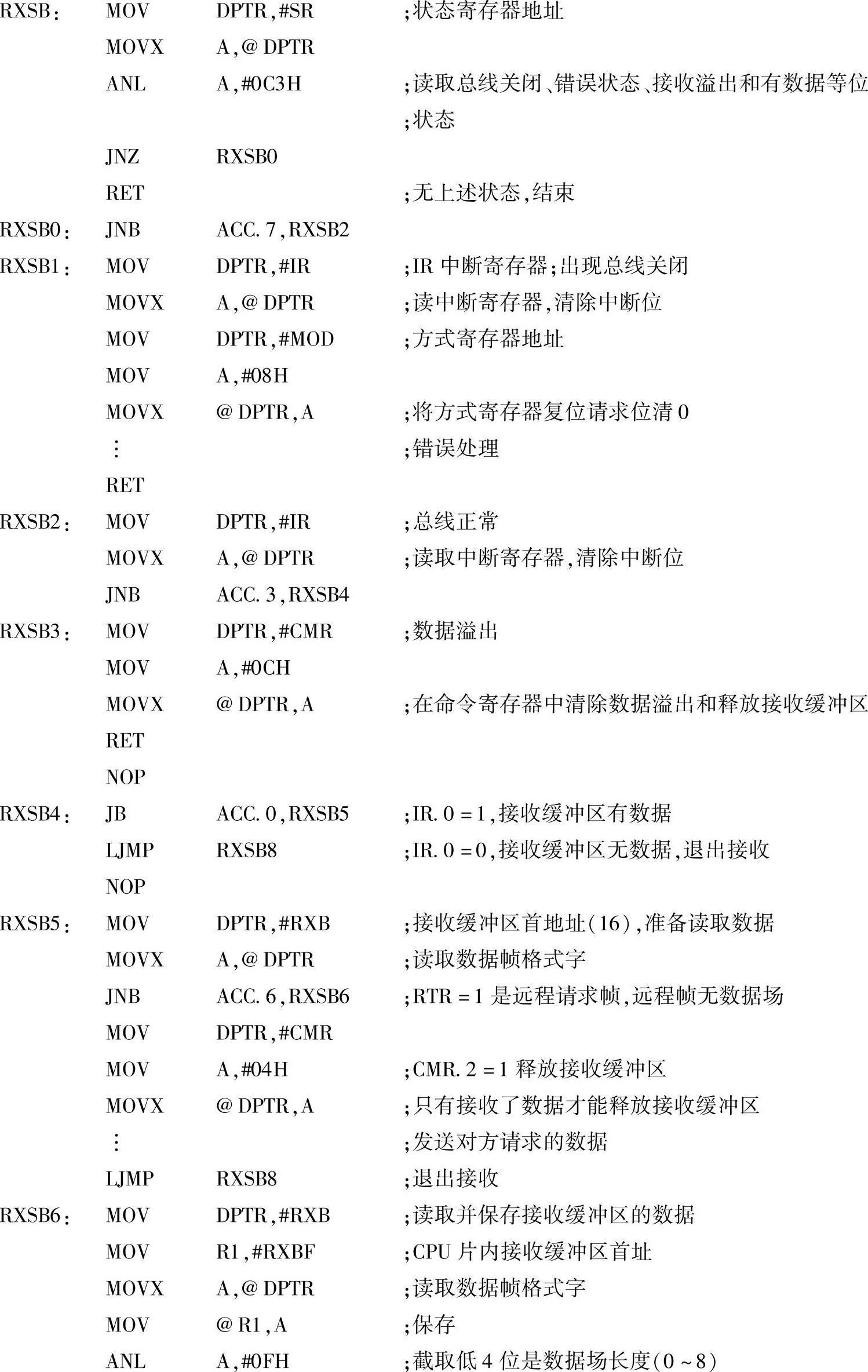
(2)CAN接收子程序
接收子程序负责节点报文的接收以及其他情况处理。接收子程序比发送子程序要复杂一些,因为在处理接收报文的过程中,同时要对诸如总线关闭、错误报警、接收溢出等情况进行处理。SJA1000报文的接收主要有两种方式:中断接收方式和查询接收方式。如果对通信的实时性要求不是很强,建议采用查询接收方式。两种接收方式的编程思路基本相同,下面给出以查询方式接收报文的接收子程序清单。
入口条件:无。
出口:接收的报文放在RXBF开始的缓冲区中。

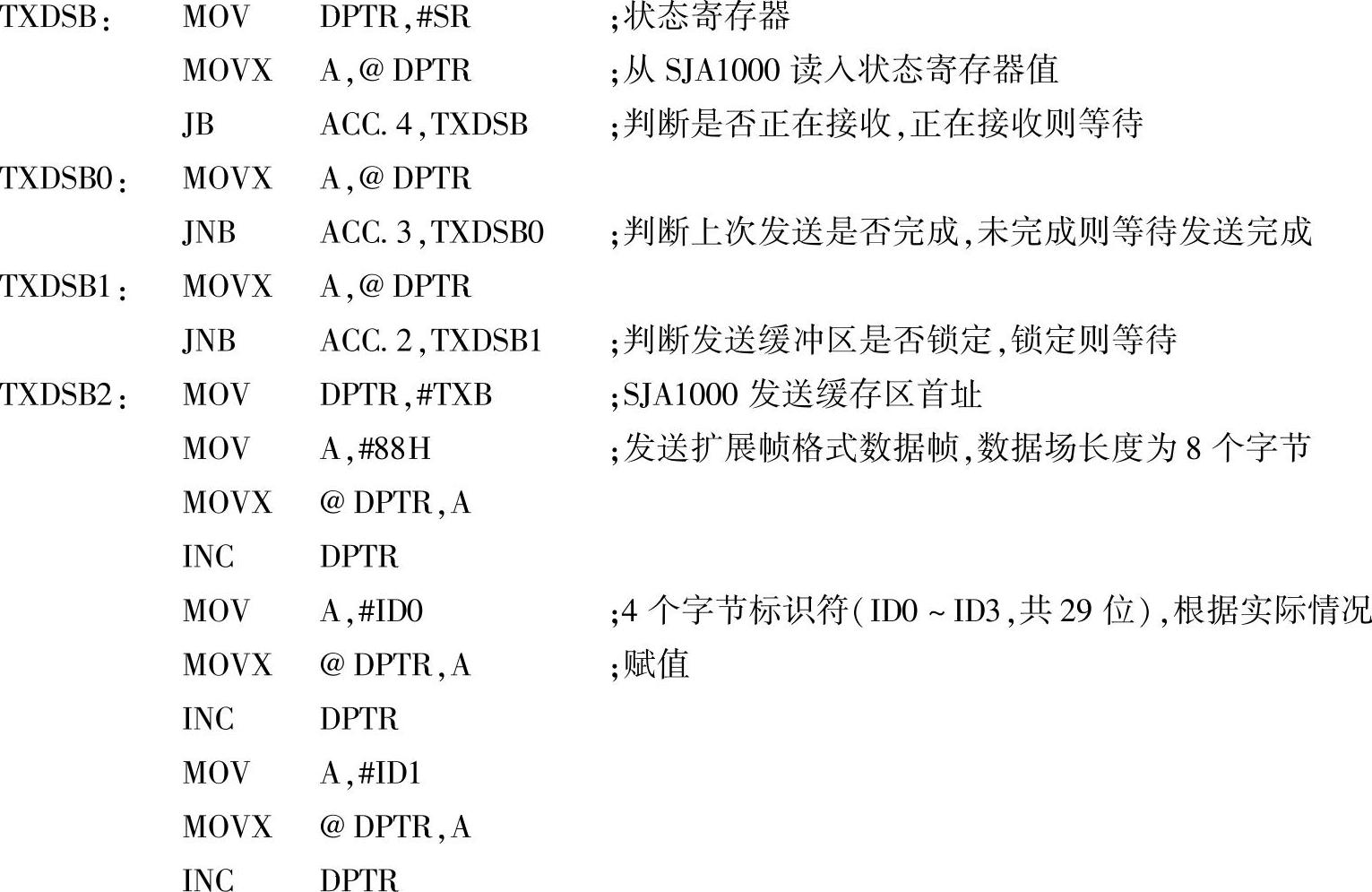
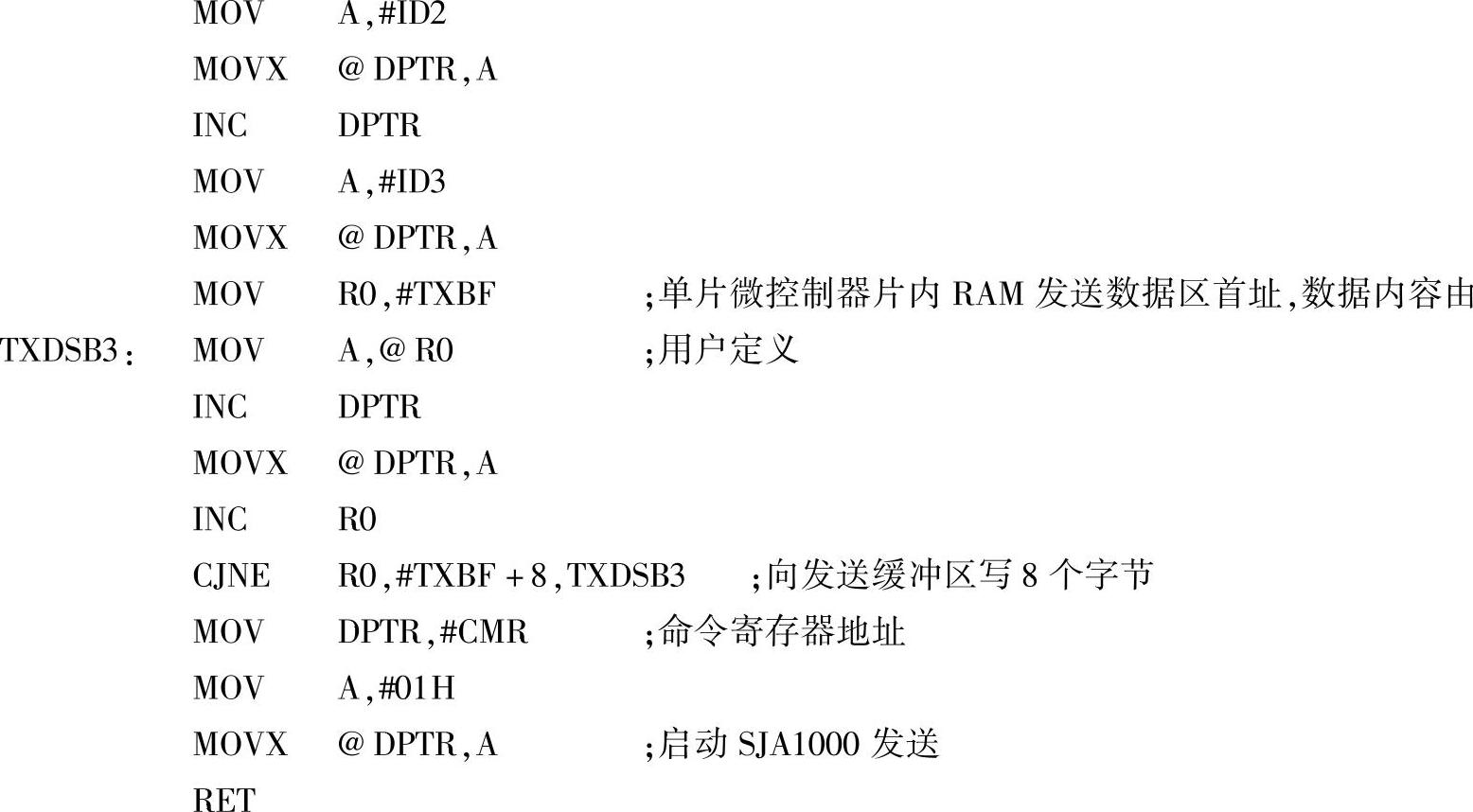
(3)CAN发送子程序
发送子程序负责节点报文的发送。发送时用户只需将待发送的数据按特定格式组合成一帧报文,送入SJA1000发送缓存区中,然后启动SJA1000发送即可。当然在往SJA1000发送缓存区送报文之前,必须先进行判断。发送程序分发送远程帧和数据帧两种,远程帧无数据场。
入口条件:将要发送的报文存入TXBF开始的单元。
出口:无。
1)发送数据帧子程序。
2)发送远程帧。

有关现场总线及其应用技术的文章

基金会现场总线,是在过程自动化领域得到广泛支持和具有良好发展前景的技术。屈于用户的压力,这两大集团于1994年9月合并,成立了现场总线基金会,致力于开发出国际上统一的现场总线协议。基金会现场总线分低速H1和高速H2两种通信速率。H1的传输速率为31.25 kbit/s,通信距离可达1900 m,可支持总线供电,支持本质安全防爆环境。H2总线标准也已形成。......
2023-11-22

INTERBUS定义了该模型的第1、2、7层。INTERBUS具有强大的可靠性、可诊断性和易维护性。INTERBUS采用了集总帧型的数据环通信。强大的诊断功能是INTERBUS区别于其他总线所独有的。INTERBUS CLUB负责向设备生产厂家提供INTERBUS的接口方案和接口芯片,向其成员提供信息,帮助解决技术问题及为特定的应用找寻合适的INTERBUS产品。INTERBUS的技术发起人为德国菲尼克斯公司。另外,在美国和中国也设有INTERBUS技术中心。......
2023-11-22
WorldFIP技术硬件体系由两个互补的部分组成:通信控制器和通信介质器件。5)用于WorldFIP连接的费用要求。WorldFIP现场总线第一个通信控制器是在1987年开发成功的。图8-9 WorldFIP现场总线通信站的连接......
2023-11-22

西门子为PLC之间简单高速的数字通信提供用户ASICs。参照PROFIBUS DIN 19245第一部分和第三部分设计的这些ASICs,支持并可以完全处理PLC站之间的数据通信。下列的ASICs与微处理器结合可提供智能从站的解决方案:SPC的设计基于OSI参考模型的第一层,需要附加一个微处理器用于实现第二层和第七层的功能。另一种称作LSPM2/SPM2的ASICs是适应这些设备的低成本改造。主站在七层模型的第二层寻址这些ASICs,两个ASICs收到正确的报文后,自动生成所要求的响应报文。......
2023-11-22

现场总线报文规范层FMS是基金会现场总线通信模型中应用层的另一个子层。FMS提供了一组服务和标准的报文格式。与OD描述联系在一起,FMS为现场设备应用程序规定了功能性界面。现场总线报文规范层由以下几部分组成:虚拟现场设备、对象字典管理、联系关系管理、域管理、程序调用管理、动态参数管理和时间管理。由用户层监测导致事件发生的条件,当条件发生时,该应用程序激活事件通知服务,并由使用者确认。......
2023-11-22
IDA是一种完全建立在以太网基础上的工业以太网规范,它将一种实时的基于Web的分布自动化环境与集中的安全体系结构加以结合,目标是创立一个基于TCP/IP的分散自动化的解决方案。作为一个单纯的工业以太网协议,IDA涵盖自动化结构中所有层次,包括设备层。因为ModBus TCP/IP是完全透明的,所以很好地符合IDA。IDA协议建立在组件的基础上,该组件包括了IEC 61449的第一部分体系结构功能块标准,但用IDA的体系结构替代了IEC 61499的模型。IDA的协议栈如图1-18所示。......
2023-11-22

图11-16 uIP与系统底层硬件驱动和上层应用程序的关系2.第二路以太网通信程序设计及W5100的Socket编程W5100内嵌硬件TCP/IP协议栈,支持TCP、UDP、IPv4、ARP和ICMP等。......
2023-11-22

PCI总线是由Intel公司提出的。PCI总线不是由ANSI通过的标准,但由于它是由厂家自发制定执行的标准,具有众多的优点,拥护者,执行者众多,成了事实上的标准。PCI总线共有100个引脚,如果只作为目标设备,至少需要47条,如作为主设备则需要49条。本设计使用位命令字,其定义如下:3.PCI总线基本协议PCI上的基本总线传输机制是突发成组传输。......
2023-11-22
相关推荐