图6-4 连杆草图图6-5 连杆实体图5)利用对曲柄和连杆的修改可以得到机架长度为160mm和摇杆长度为150mm的三维实体图,如图6-6和图6-7所示。1)单击新建运动算例后,屏幕下方此时出现运动算例工作区,如图6-12所示,在算例类型下拉菜单中选择Motion分析,时间设置中选择5秒,如图6-13所示。图6-16 摇杆角速度幅值图6)通过设置可以得到摇杆的角加速度的幅值,如图6-17所示。......
2023-11-21
(1)零件造型。
1)单击标准工具栏上的“新建”图标按钮 →“零件”→“确定”。单击
→“零件”→“确定”。单击 →
→ →
→ →利用草图绘制工具绘制图6-43,具体过程:绘制中心线
→利用草图绘制工具绘制图6-43,具体过程:绘制中心线 从原点出发并标注长度为80mm,再利用中心线的两个端点为圆心,利用草图
从原点出发并标注长度为80mm,再利用中心线的两个端点为圆心,利用草图 绘制半径为5mm和10mm的同心圆各两个,然后绘制半径为10mm圆的外公切线,利用剪裁实体
绘制半径为5mm和10mm的同心圆各两个,然后绘制半径为10mm圆的外公切线,利用剪裁实体 得到如图6-43所示的草图后单击重建模型
得到如图6-43所示的草图后单击重建模型 退出草图绘制。
退出草图绘制。
2)单击“特征”工具栏上的“拉伸凸台/基体”图标按钮 ,在“凸台-拉伸1”属性管理器和绘图区中进行设置,拉伸深度为10mm,如图6-44所示,单击图标
,在“凸台-拉伸1”属性管理器和绘图区中进行设置,拉伸深度为10mm,如图6-44所示,单击图标 确定,得到如图6-45所示的曲柄。
确定,得到如图6-45所示的曲柄。
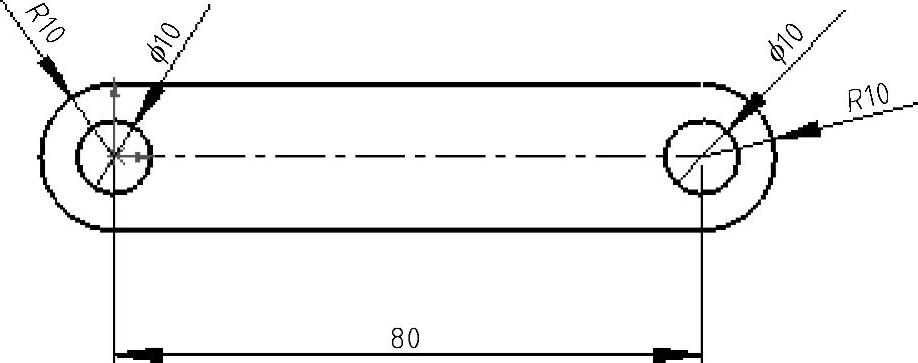
图6-43 曲柄草图
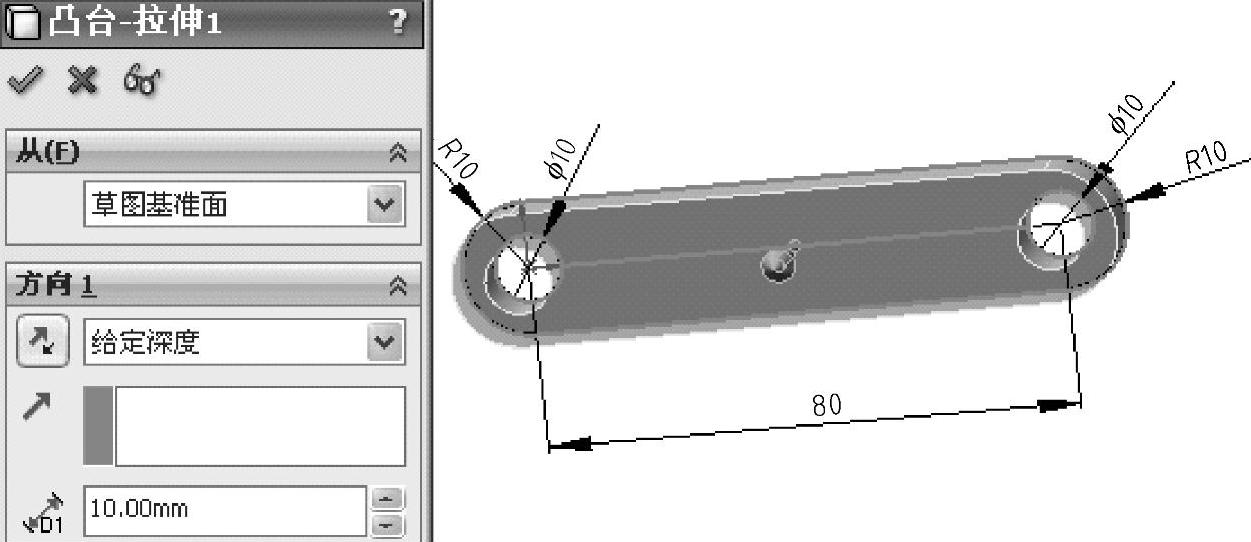
图6-44 曲柄草图拉伸过程图
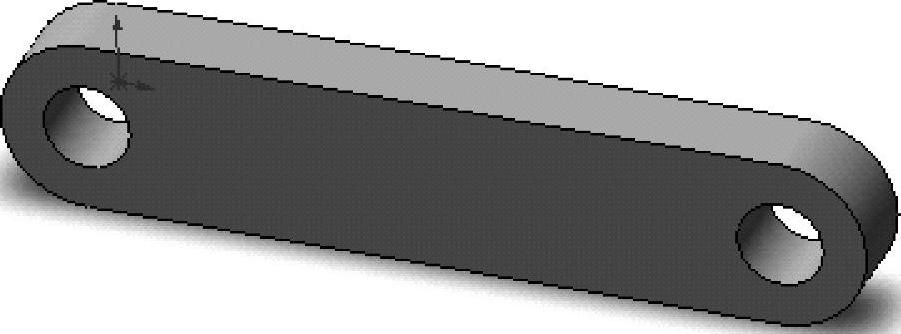
图6-45 曲柄
3)选择“文件”→“另存为”命令,把文件命名为“曲柄”。
4)同样的造型思路得到如图6-46所示的草图,再拉伸可以得到连杆三维实体图,如图6-47所示。
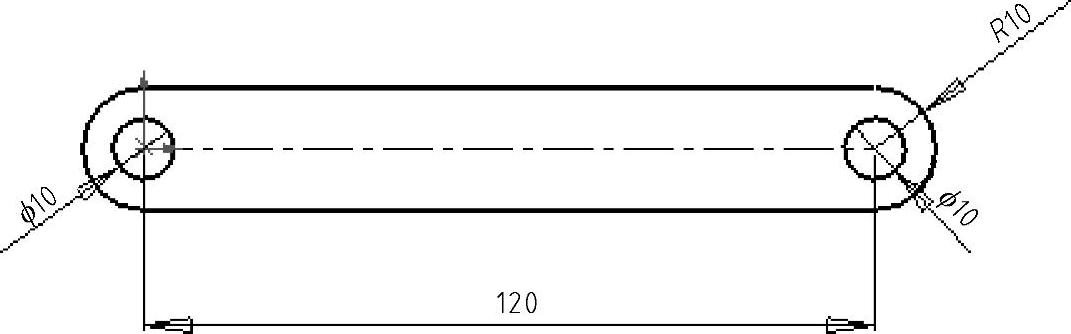
图6-46 连杆草图
图6-47 连杆实体图
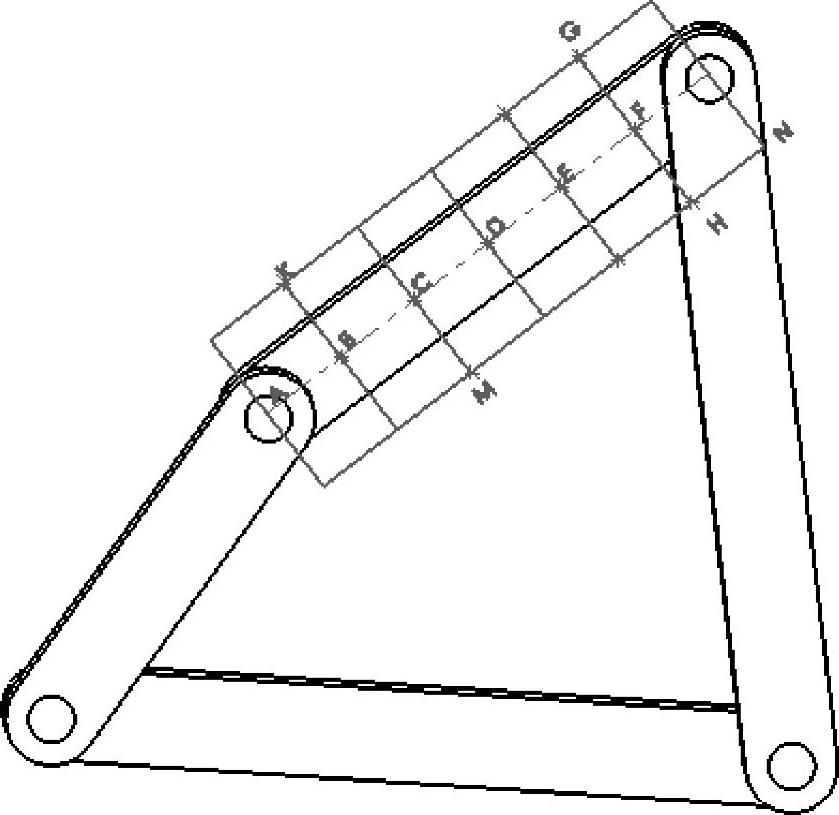
5)为了方便连杆上不同方位点的轨迹对比,在连杆图6-46的三维图的基础上再以前端面为草图绘制基准面,作如图6-48所示的草图,并对各点进行标注,分别为A、B、C、D、E、F、G、H、K、M、N点。
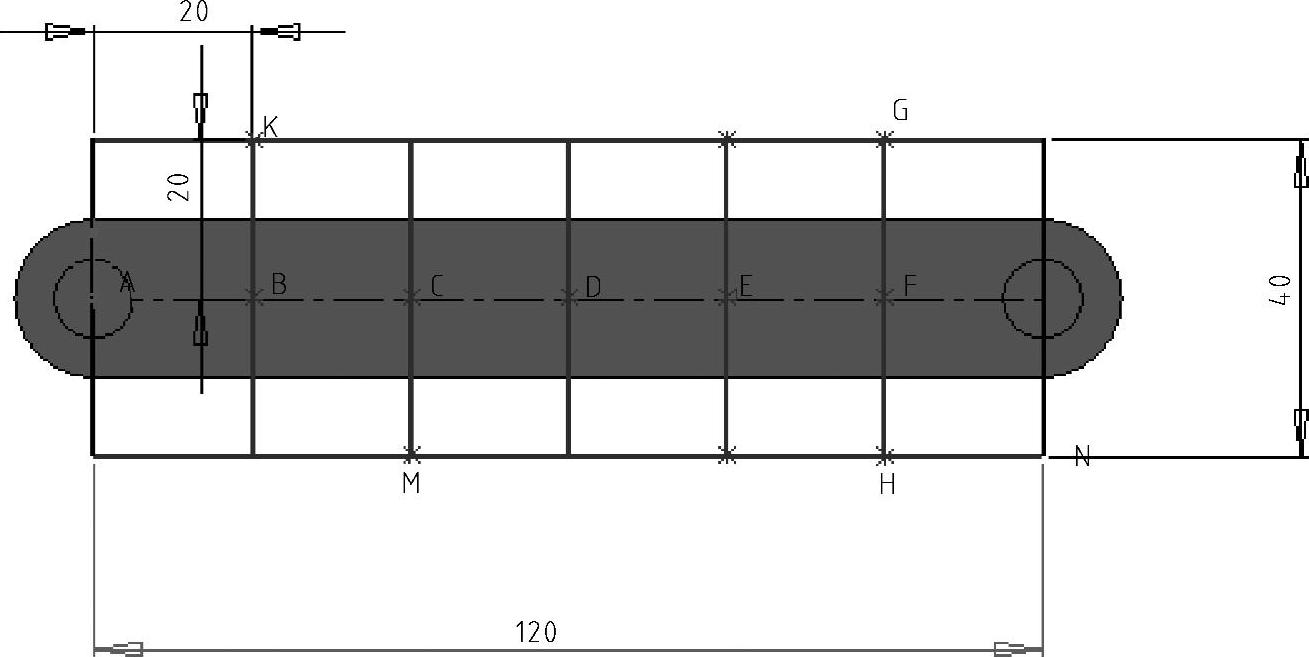
图6-48 连杆轨迹点位置草图
6)利用对曲柄和连杆的修改可以得到机架长度为160mm和摇杆长度为150mm的三维实体图,如图6-49和图6-50所示。
图6-49 摇杆实体图
图6-50 机架实体图
(2)装配体安装。
1)单击标准工具栏上的按钮 →
→ →“确定”。选择菜单→插入→零部件→现有零件/装配体,单击“浏览”按钮选择曲柄连杆机构文件夹,选择已经做好的零件模型机架。将其放入工作区域,右键单击机架选择浮动按钮,单击旋转的按钮,调整活塞的角度以便于装配,如图6-51所示。
→“确定”。选择菜单→插入→零部件→现有零件/装配体,单击“浏览”按钮选择曲柄连杆机构文件夹,选择已经做好的零件模型机架。将其放入工作区域,右键单击机架选择浮动按钮,单击旋转的按钮,调整活塞的角度以便于装配,如图6-51所示。
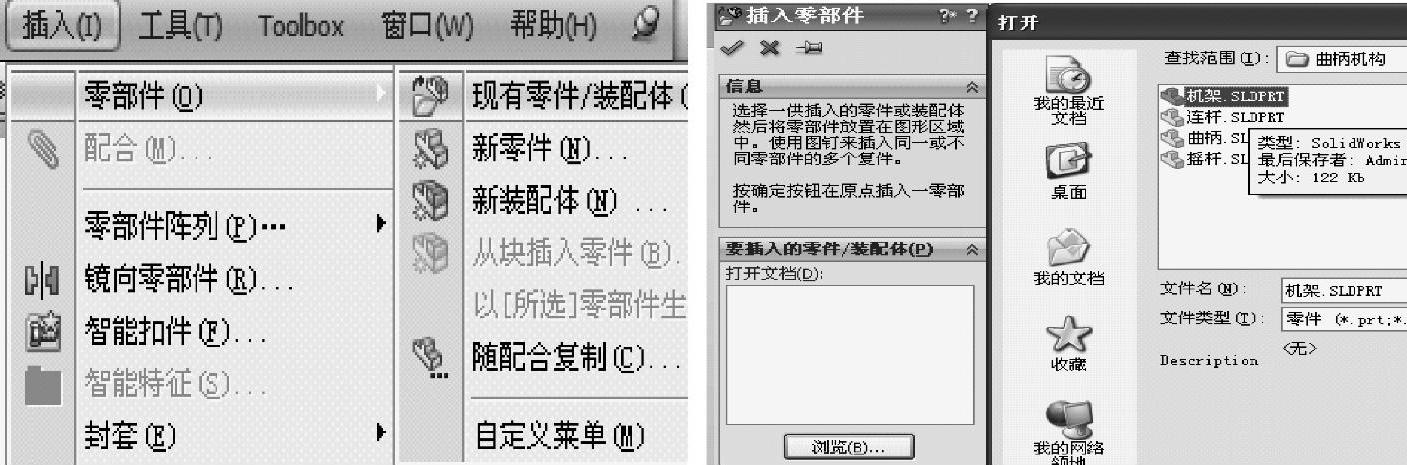
图6-51 加入装配体零件的过程图
2)用同样的方法将曲柄加入装配体文件中,选择曲柄的圆柱孔曲面和机架的圆柱柱面,单击配合 ,选择配合关系同轴心,具体操作如图6-52所示。然后再选择机架圆柱体的外端面和曲柄的端面后单击配合
,选择配合关系同轴心,具体操作如图6-52所示。然后再选择机架圆柱体的外端面和曲柄的端面后单击配合 ,选择配合重合关系,如图6-53所示。
,选择配合重合关系,如图6-53所示。

图6-52 同轴心配合条件
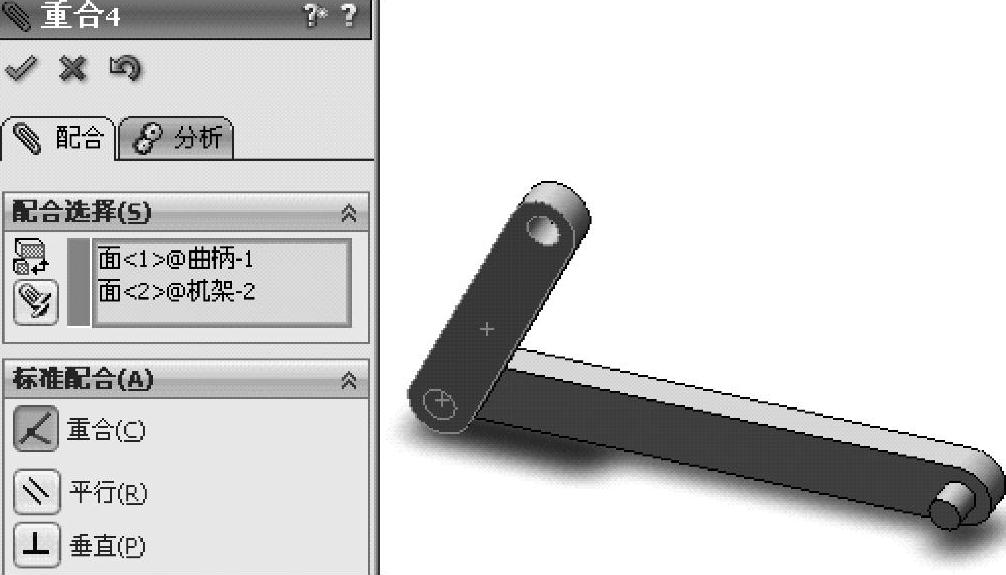
图6-53 面重合的配合关系
3)类似步骤1)加入连杆和摇杆,并按照步骤2)添加其余铰链的配合关系,得到完全定义的装配体,如图6-54所示。
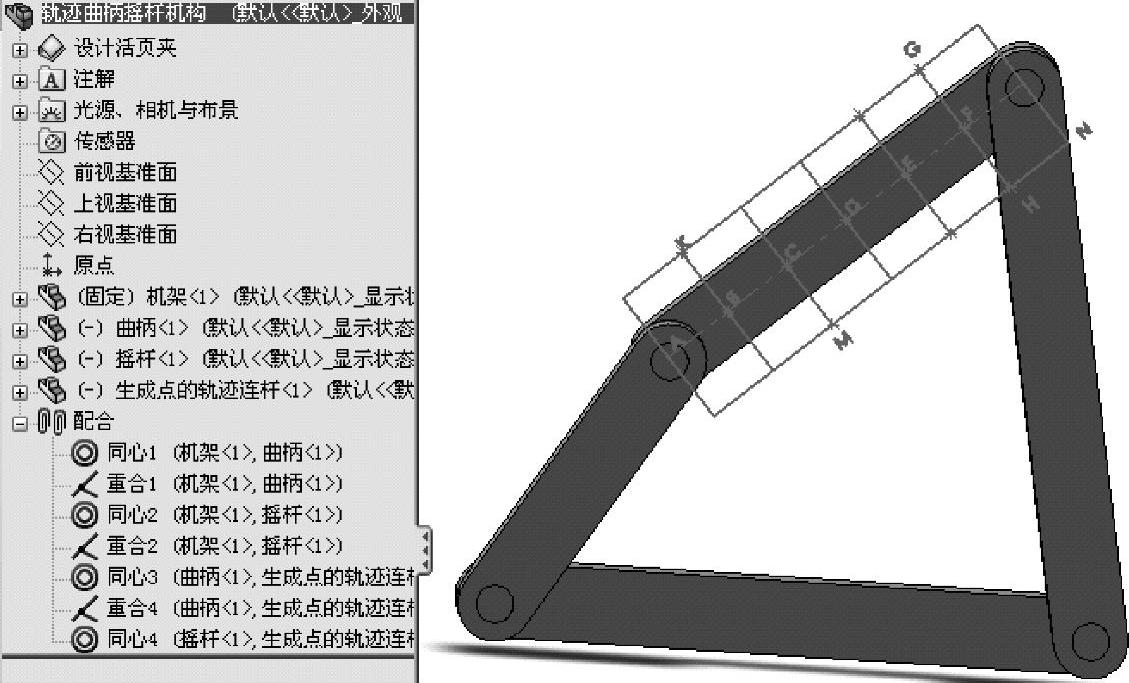
图6-54 完全定义的装配体
4)为了使各点看上去清晰,转换装配体为“显示样式” →“消除隐藏线”
→“消除隐藏线” 显示方式,如图6-55所示。
显示方式,如图6-55所示。
 (www.chuimin.cn)
(www.chuimin.cn)
图6-55 转配体消除隐藏线显示
(3)连杆上各点轨迹的跟踪。
1)单击新建运动算例 后,屏幕下方出现运动算例工作区,如图6-56所示,在算例类型下拉菜单中选择Motion分析,时间设置中选择5秒,如图6-57所示。
后,屏幕下方出现运动算例工作区,如图6-56所示,在算例类型下拉菜单中选择Motion分析,时间设置中选择5秒,如图6-57所示。
2)在MotionManager工具栏中单击马达 ,弹出马达对话框,在零部件/方向下方选择零件曲柄的面,如图6-58所示。马达将自动加入相同的面以指定方向。马达的运动方式为等速运动,速度设置为60RPM。马达的类型选择为旋转马达。在要移动的零部件区域保持空白,这将确定马达的方向是相对于全局坐标系指定的。单击
,弹出马达对话框,在零部件/方向下方选择零件曲柄的面,如图6-58所示。马达将自动加入相同的面以指定方向。马达的运动方式为等速运动,速度设置为60RPM。马达的类型选择为旋转马达。在要移动的零部件区域保持空白,这将确定马达的方向是相对于全局坐标系指定的。单击 确定,完成马达参数的设定。
确定,完成马达参数的设定。
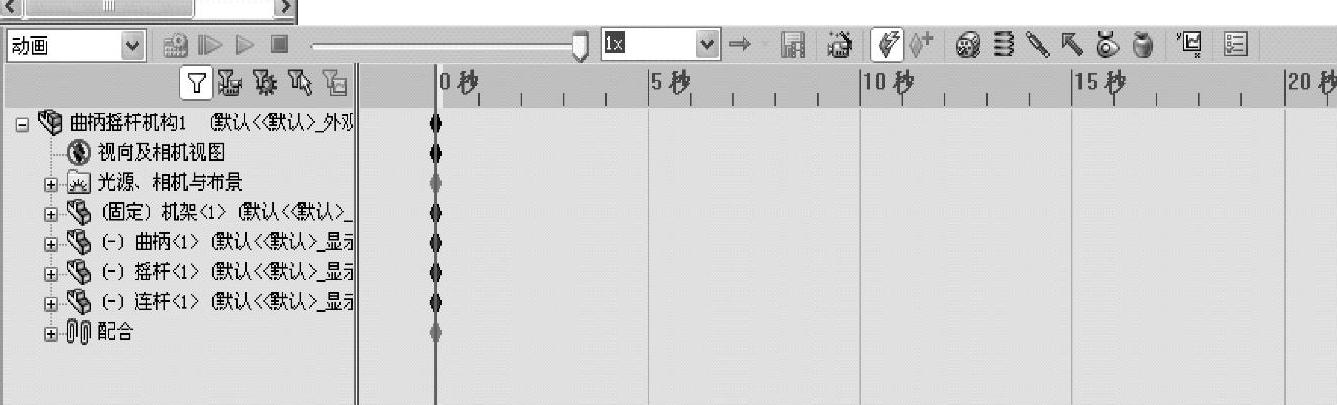
图6-56 运动算例工作区
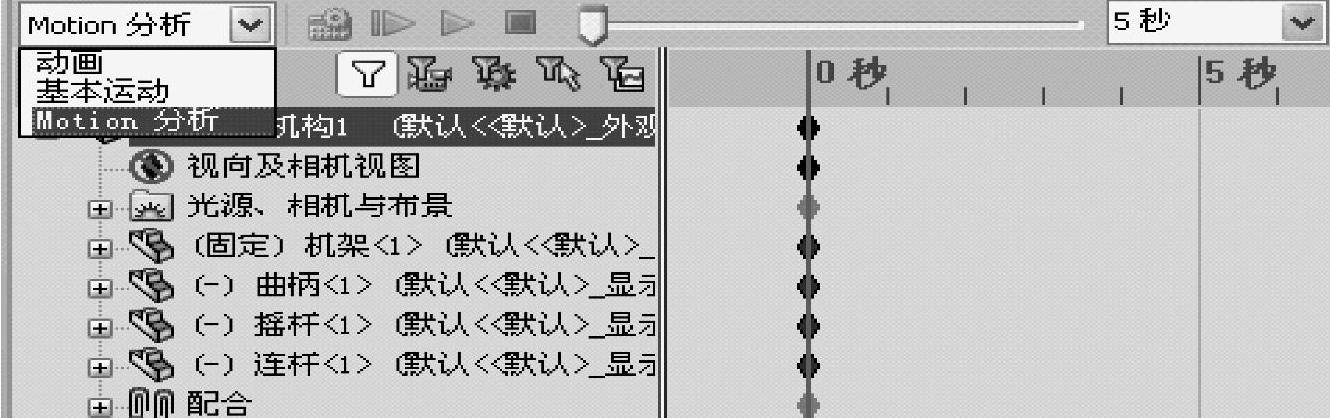
图6-57 运动算例内容的设置图

图6-58 旋转马达的设置
3)单击计算 ,此时可以看到曲柄摇杆机构的仿真动画开始运行,单击停止
,此时可以看到曲柄摇杆机构的仿真动画开始运行,单击停止 可以随时停止。
可以随时停止。
4)单击运动算例的菜单结果和图解项图标 ,具体过程如图6-59所示,在结果属性管理器中填入连杆面(单击后自动加入)→在选取类别中选择“位移/速度/加速度”→在子类别中选择“跟踪路径”→单击连杆上的A点,设置好后单击
,具体过程如图6-59所示,在结果属性管理器中填入连杆面(单击后自动加入)→在选取类别中选择“位移/速度/加速度”→在子类别中选择“跟踪路径”→单击连杆上的A点,设置好后单击 确定。
确定。
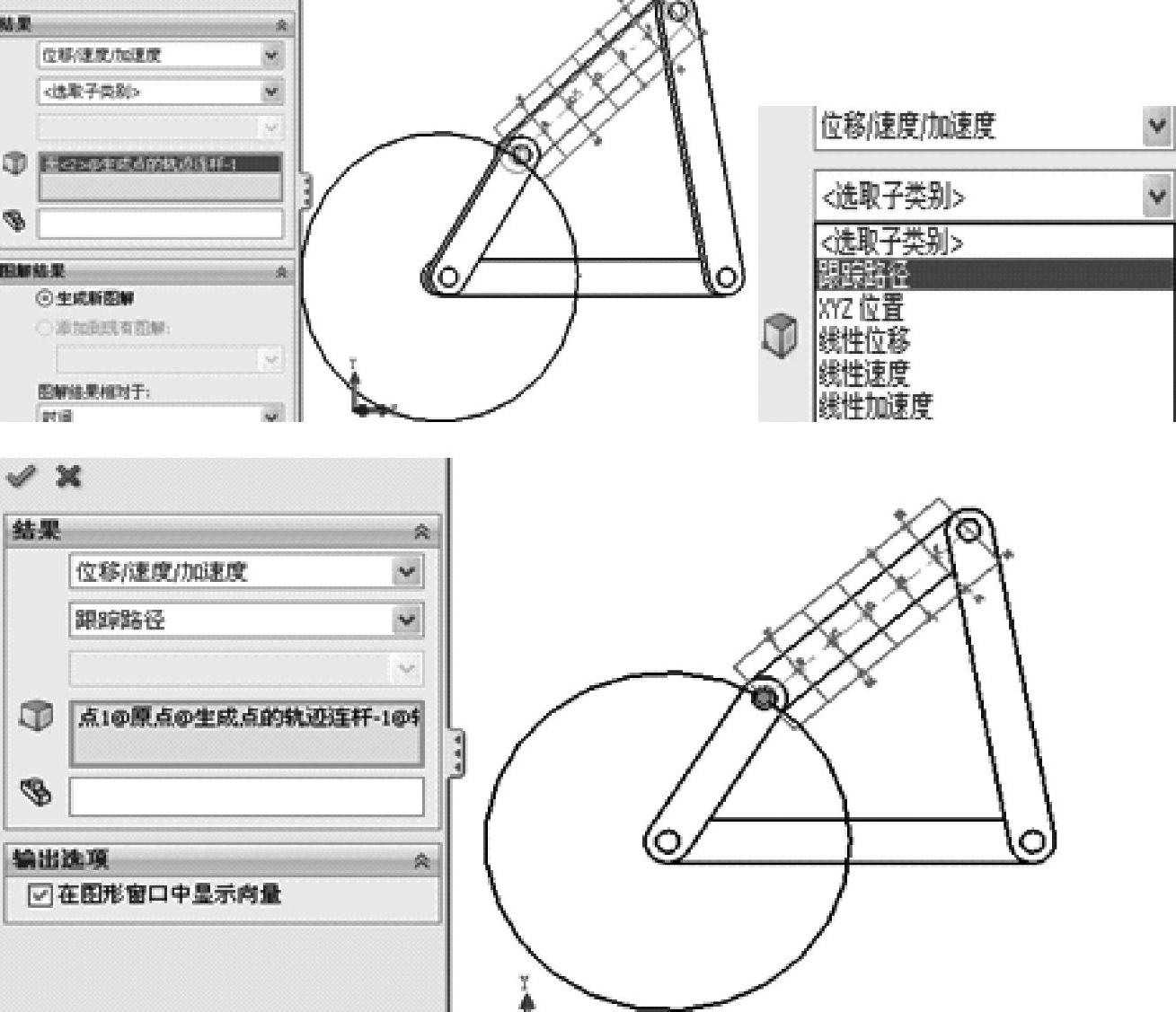
图6-59 结果属性管理器的设置图
5)最后得到A点的轨迹图为圆,如图6-59所示。
6)单击Motion菜单“结果与图解” 后,弹出结果属性管理器对话框,类似于步骤4)的操作,不同的是单击B点得到的轨迹如图6-60所示。
后,弹出结果属性管理器对话框,类似于步骤4)的操作,不同的是单击B点得到的轨迹如图6-60所示。
7)同样方法可以得到其他各点的轨迹,如图6-61~图6-68所示。
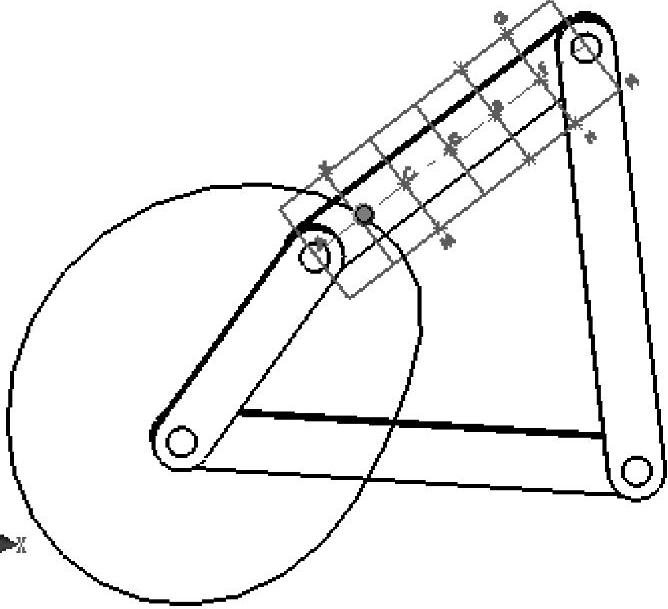
图6-60 B点的轨迹图
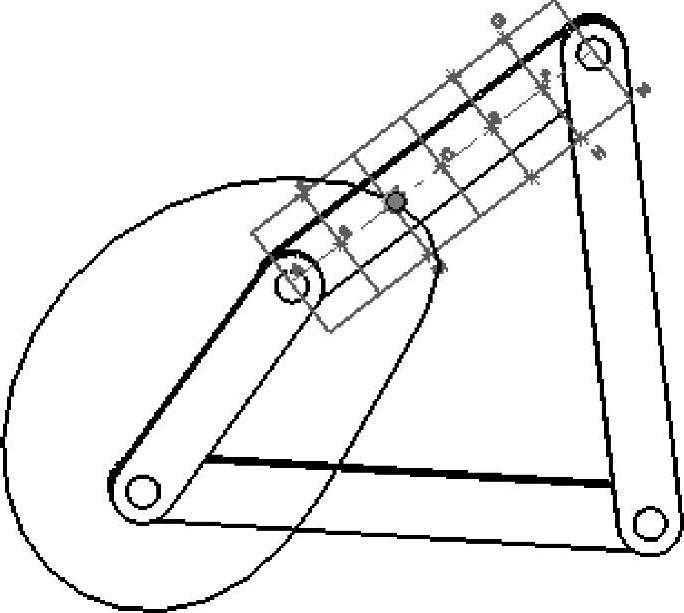
图6-61 C点的轨迹
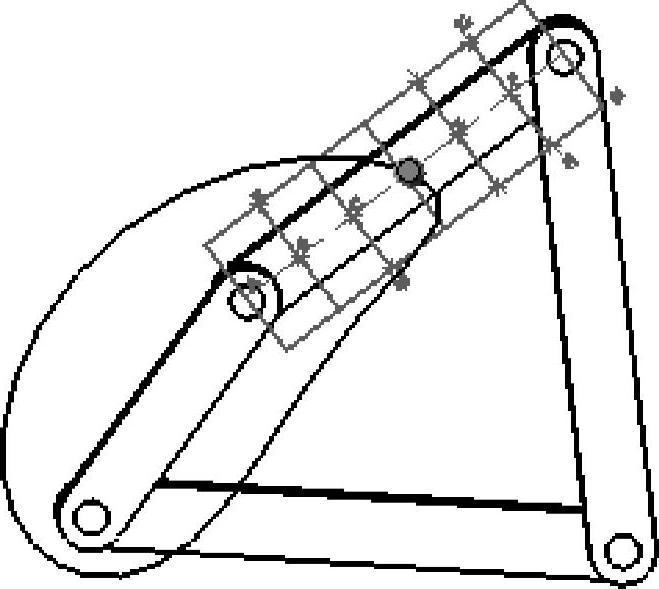
图6-62 D点的轨迹
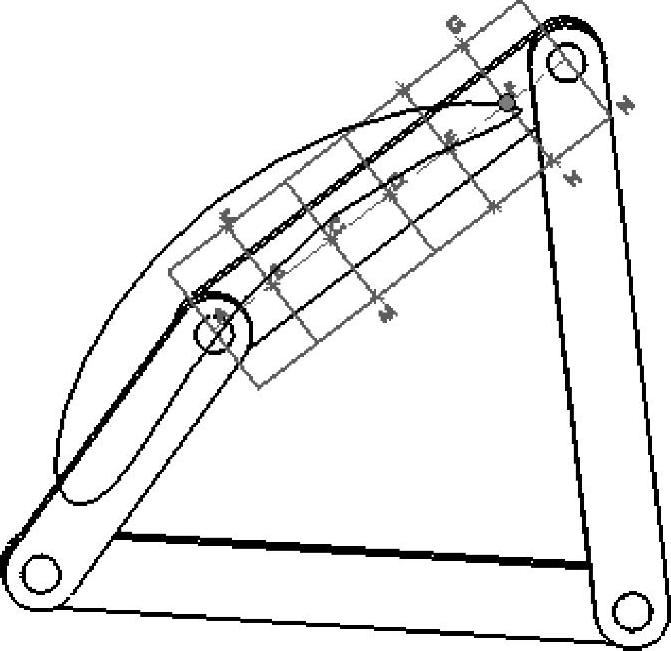
图6-63 F点的轨迹
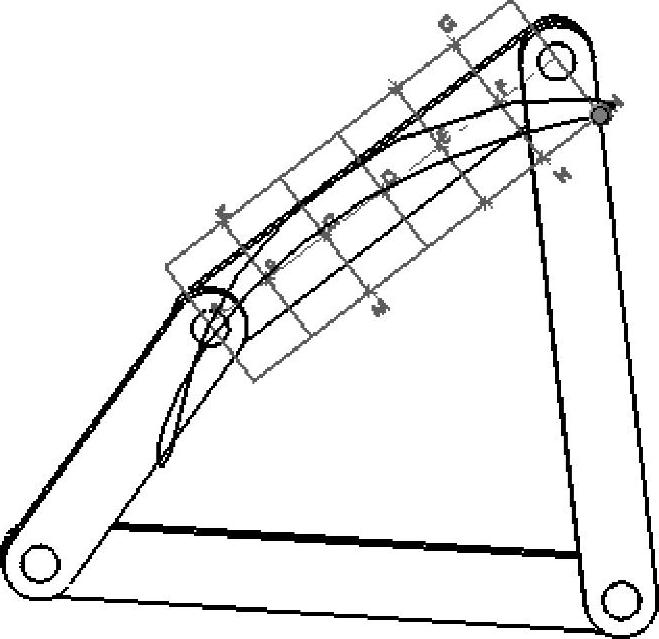
图6-64 N点的轨迹
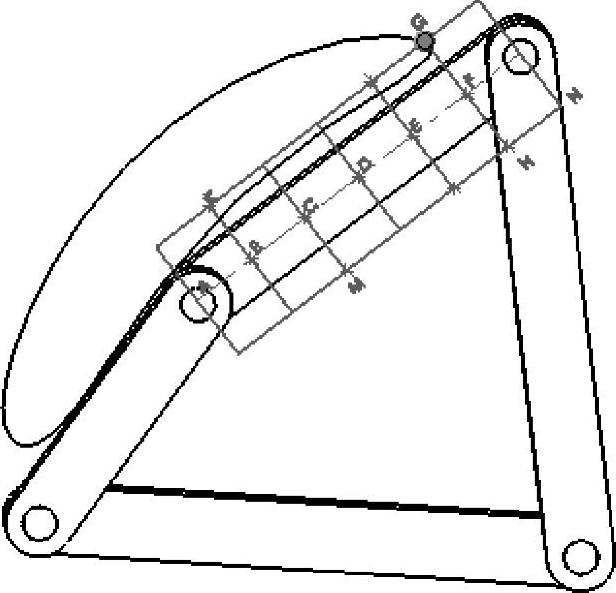
图6-65 G点的轨迹
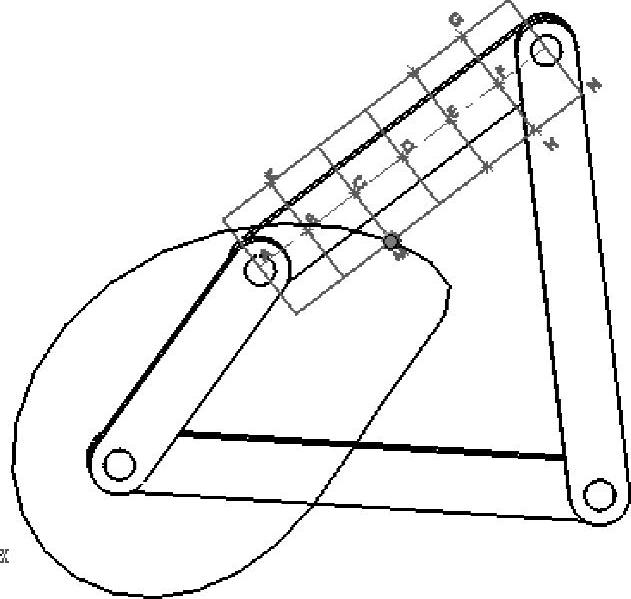
图6-66 M点的轨迹
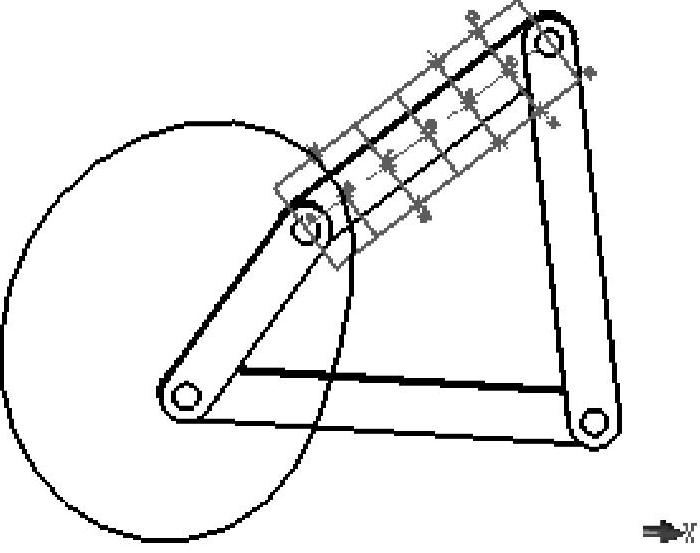
图6-67 K点的轨迹
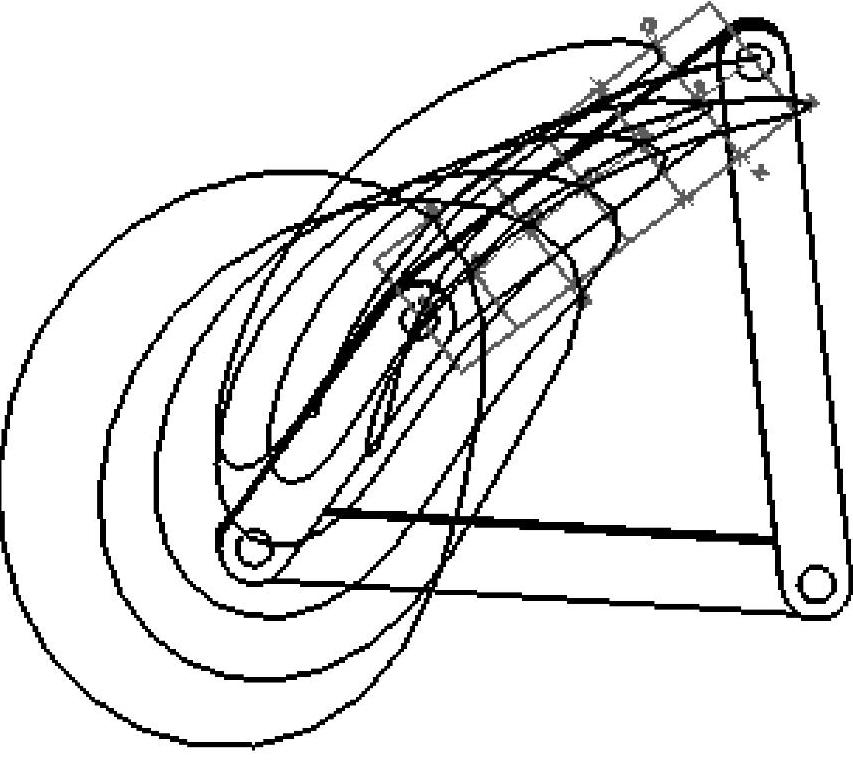
图6-68 连杆各点的轨迹合成图
有关SolidWorks上机实践经典40例的文章

图6-4 连杆草图图6-5 连杆实体图5)利用对曲柄和连杆的修改可以得到机架长度为160mm和摇杆长度为150mm的三维实体图,如图6-6和图6-7所示。1)单击新建运动算例后,屏幕下方此时出现运动算例工作区,如图6-12所示,在算例类型下拉菜单中选择Motion分析,时间设置中选择5秒,如图6-13所示。图6-16 摇杆角速度幅值图6)通过设置可以得到摇杆的角加速度的幅值,如图6-17所示。......
2023-11-21
进入零件设计工作台操作参见1.1。绘制矩形和圆草图选中左边模型树中。单击工具栏内的图标,标注并调整圆的直径尺寸为10mm,圆心在V轴上,到H轴的距离为15mm,如图21-1所示。图21-1 矩形和圆草图拉伸生成圆柱体单击工具栏中图标,出现对话框。在区下拉列表框内选择默认的,在栏内填上厚度20mm。单击按钮,先看一下立体图效果。......
2023-07-01

图6-31 加入装配体零件的过程图2)同样的方法将曲柄加入装配体文件中,选择曲柄的圆柱孔曲面和机架的圆柱柱面,单击配合,选择配合关系同轴心,具体操作如图6-32所示。图6-37 旋转马达的设置3)单击计算,此时可以看到曲柄滑块机构的仿真动画开始运行,单击停止可以随时停止。图6-41 滑块的线速度的幅值图6-42 滑块的线加速度的幅值......
2023-11-21

卫星沿着轨道绕地球运行,地球本身也在自转,星下点轨迹在一般情况下不会再重复前一圈运行轨迹。,为一个恒星日内卫星围绕地球旋转的次数)时,其星下点在一个恒星日内可重复,称为回归轨道卫星。N为奇数时,星下点的轨迹一定有交点在赤道上,交点数为n个,如果存在不在赤道上的交点,则一定关于赤道对称分布。图4-9为T=8 h(N=3)、轨道倾角为55°时的星下点示意图,星下点轨迹交点在赤道上,交点数为3个。......
2023-07-02
图2-58 草图1图2-59 草图24)在特征树中选中草图2后,单击弹出如图2-60所示的属性管理器,在拔模角度填入60°,同时选中反侧切除,单击确定,得到如图2-61所示的M20六角螺栓的六角头部。梯形的尺寸计算原理由表2-1的公式中可以推演,本例M20的螺纹尺寸所得值见表2-2。单击确定后,再切除退刀槽可以得到完整的M20螺栓,如图2-66所示。图2-64 切除扫描轮廓草图图2-65 切除扫描预览图2-66 完整的M20螺栓......
2023-11-21

已知座板的外形尺寸,高度为16mm,长度为136mm,宽度为82mm,用装配体生成该座板的上模和下模。图4-23 座板和模具基体的装配体图4-24 带边线上色显示装配体图4-25 模具特征树基体颜色变蓝从装配体特征树中选中座板,单击主菜单“插入”,从弹出菜单中选择“模具”→“型腔”,如图4-26所示。在上一步“切除-拉伸”时,方向选择完全贯穿,同时勾选反侧切除,得到如图4-30所示的模型,单击文件保存,文件名为“上模”,至此座板的上下模全部生成。......
2023-11-21

单击特征拉伸命令,拉伸深度填入22mm,选中向外拔模,拔模斜度填入9.462322°,具体操作如图2-8所示。图2-7 轴的具体结构图2-8 带拔模斜度的拉伸重复退刀槽的操作步骤得到2×16的退刀槽部分,单击“确定”图标按钮,单击鼠标右键弹出如图2-9所示的菜单,然后单击旋转视图,使要建草图的圆柱端面朝向操作者,然后单击正视于→开始绘制草图→画圆,画圆的半径为13mm,拉伸深度为4mm,得到26圆柱部分,如图2-10所示。......
2023-11-21
目前永磁机构在我国配电网中应用较为普遍,当前用户普遍关心它的可靠性。用户非常关心永磁体的退磁问题。永磁机构中的机械冲击对钕铁硼永磁体来说是可以承受的,试验已充分证明了这一点。前面已指出,在双线圈式永磁机构中不存在反向磁场,因而不存在反向磁场退磁问题。即使在单线圈永磁机构中,因反向磁场不大,不足以造成永磁体退磁。只要设计时留一定裕度,自然劣化绝不会影响永磁机构的正常动作。......
2023-07-02
相关推荐