下面以图10.2.1所示的模型为例,介绍在UG中手动布线的一般过程。图10.2.1 电缆设计模型图10.2.2 装配模型Step2.选择下拉菜单命令,进入电缆设计模块。图10.2.3 “电气管线布置”工具栏Step3.定义连接件端口。单击按钮,结束连接件端口的创建,如图10.2.15所示。图10.2.14 定义原点参考图10.2.15 定义连接件端口说明:“连接件端口”用于定义插接器、元件之间的连接,“多个”端口用于定义插接器、插头与导线之间的连接。......
2023-11-20
本范例讲述了一个四杆机构的运动过程,其主要操作过程。
●在装配体中添加连杆。
●在连杆上创建运动副。
●添加解算器。
●求解。
●动画。
下面详细介绍图9.6.1所示的创建四杆机构的一般操作过程。
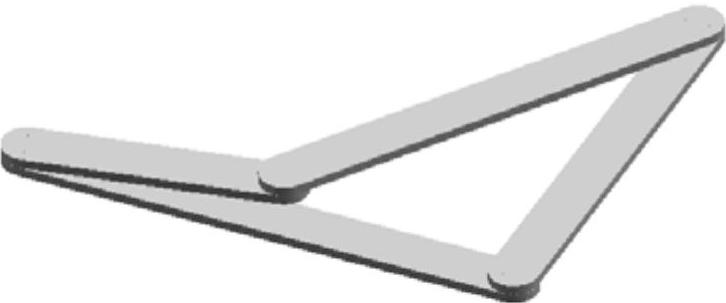
图9.6.1 四杆机构
Step1.打开文件D:\ug90\work\ch09.06\asm.prt。
Step2.选择

 命令,进入运动仿真模块。
命令,进入运动仿真模块。
Step3.新建仿真文件。
(1)在“运动导航器”中右击 ,在弹出的快捷菜单中选择
,在弹出的快捷菜单中选择 命令,系统弹出“环境”对话框。
命令,系统弹出“环境”对话框。
(2)在“环境”对话框中选中 单选项,单击
单选项,单击 按钮,在弹出的“机构运动副向导”对话框中单击
按钮,在弹出的“机构运动副向导”对话框中单击 按钮。
按钮。
Step4.指定连杆。选择下拉菜单

 命令,系统弹出“连杆”对话框,选取图9.6.2所示的组件1为连杆1,采用系统默认的设置值,在“连杆”对话框中单击
命令,系统弹出“连杆”对话框,选取图9.6.2所示的组件1为连杆1,采用系统默认的设置值,在“连杆”对话框中单击 按钮。选取图9.6.2所示的组件2为连杆2,采用系统默认的设置,在“连杆”对话框中单击
按钮。选取图9.6.2所示的组件2为连杆2,采用系统默认的设置,在“连杆”对话框中单击 按钮。选取图9.6.2所示的组件3为连杆3,采用系统默认的设置值,在“连杆”对话框中单击
按钮。选取图9.6.2所示的组件3为连杆3,采用系统默认的设置值,在“连杆”对话框中单击 按钮。
按钮。
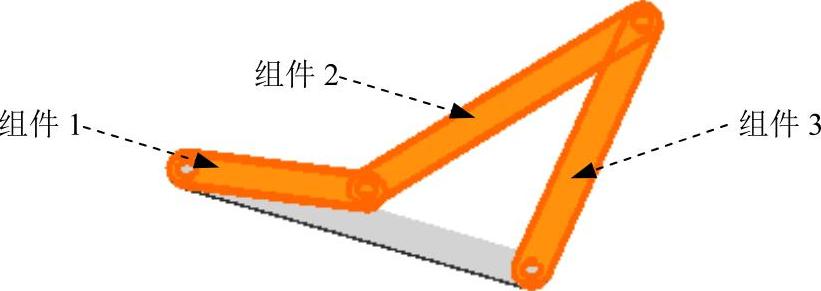
图9.6.2 指定连杆
Step5.添加运动副。
(1)选择下拉菜单

 命令,系统弹出“运动副”对话框。
命令,系统弹出“运动副”对话框。
(2)定义运动副类型。在“运动副”对话框 选项卡的
选项卡的 下拉列表中选择
下拉列表中选择 选项。
选项。
(3)定义连杆。选取图9.6.3所示的连杆1。
(4)定义移动方向。在“运动副”对话框的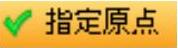 下拉列表中选取“圆弧中心”
下拉列表中选取“圆弧中心” 选项,在模型中选取图9.6.3所示的圆弧为定位原点参照。在
选项,在模型中选取图9.6.3所示的圆弧为定位原点参照。在 下拉列表中选择
下拉列表中选择 为矢量。
为矢量。
图9.6.3 指定连杆
(5)定义驱动。在“运动副”对话框中单击 选项卡,在
选项卡,在 下拉列表中选择
下拉列表中选择 选项,并在其下的
选项,并在其下的 文本框中输入值30。
文本框中输入值30。
(6)单击 按钮,完成第一个运动副的添加。(www.chuimin.cn)
按钮,完成第一个运动副的添加。(www.chuimin.cn)
(7)定义连杆。在“运动副”对话框中再选取图9.6.4所示的连杆1。
(8)定义移动方向。在“运动副”对话框的 下拉列表中选择“圆弧中心”
下拉列表中选择“圆弧中心” 定位原点,在模型中选取图9.6.4所示的圆弧为定位原点参照;在
定位原点,在模型中选取图9.6.4所示的圆弧为定位原点参照;在 下拉列表中选择
下拉列表中选择 为矢量。
为矢量。

图9.6.4 指定连杆
(9)定义连杆。在“运动副”对话框 区域中单击
区域中单击 按钮,选取图9.6.4所示的连杆2。
按钮,选取图9.6.4所示的连杆2。
(10)单击 按钮,完成第二个运动副的添加。
按钮,完成第二个运动副的添加。
(11)定义连杆。在“运动副”对话框中选取图9.6.5所示的连杆2。
(12)定义移动方向。在“运动副”对话框的 下拉列表中选取“圆弧中心”
下拉列表中选取“圆弧中心” 定位原点,在模型中选取图9.6.5所示的圆弧为定位原点参照;在
定位原点,在模型中选取图9.6.5所示的圆弧为定位原点参照;在 下拉列表中选择
下拉列表中选择 为矢量。
为矢量。
(13)定义连杆。在“运动副”对话框 区域中单击按钮
区域中单击按钮 ,选取连杆3。
,选取连杆3。
(14)单击 按钮,完成第三个运动副的添加。
按钮,完成第三个运动副的添加。

图9.6.5 指定连杆
(15)定义连杆。在“运动副”对话框中选取图9.6.6所示的连杆3。
(16)定义移动方向。在“运动副”对话框的 下拉列表中选取“圆弧中心”
下拉列表中选取“圆弧中心” 定位原点,在模型中选取图9.6.6所示的圆弧为定位原点参照;在
定位原点,在模型中选取图9.6.6所示的圆弧为定位原点参照;在 下拉列表中选择
下拉列表中选择 为矢量。
为矢量。
(17)单击 按钮,完成整个运动副的创建。
按钮,完成整个运动副的创建。

图9.6.6 指定连杆
Step6.添加运算器。
(1)选择下拉菜单

 命令,系统弹出“运算方案”对话框。
命令,系统弹出“运算方案”对话框。
(2)在“运算方案”对话框 区域的
区域的 文本框中输入数值30,在
文本框中输入数值30,在 文本框中输入数值30。
文本框中输入数值30。
(3)单击 按钮,完成运算器的添加。
按钮,完成运算器的添加。
Step7.对运算器进行求解。选择下拉菜单


 命令,对运算器进行求解。
命令,对运算器进行求解。
Step8.播放动画。在“动画控制”工具栏中单击“播放”按钮 ,即可播放动画。
,即可播放动画。
注意:只有在“动画控制”工具栏中单击“完成动画”按钮 之后,才可修改动画的相关属性。
之后,才可修改动画的相关属性。
Step9.单击 (完成动画)按钮,保存动画模型文件。
(完成动画)按钮,保存动画模型文件。
有关UG NX 9.0超级学习手册的文章

下面以图10.2.1所示的模型为例,介绍在UG中手动布线的一般过程。图10.2.1 电缆设计模型图10.2.2 装配模型Step2.选择下拉菜单命令,进入电缆设计模块。图10.2.3 “电气管线布置”工具栏Step3.定义连接件端口。单击按钮,结束连接件端口的创建,如图10.2.15所示。图10.2.14 定义原点参考图10.2.15 定义连接件端口说明:“连接件端口”用于定义插接器、元件之间的连接,“多个”端口用于定义插接器、插头与导线之间的连接。......
2023-11-20

Task1.部件装配下面以图5.10.1所示为例,讲述一个多部件装配实例的一般操作过程,使读者进一步熟悉UG NX 9.0的装配操作。图5.10.1 综合装配实例Step1.新建文件,单击,在区域后面的文本框中输入assemblies.prt,在后的文本框中输入D:\ug90\work\ch05.10。单击按钮,系统弹出“添加组件”对话框,并进入装配环境。图5.10.8 插入对称面图5.10.9 镜像轴套图5.10.10 添加组件上基座选择命令。图5.10.12 添加组件螺栓图5.10.13 选择配对平面Step9.将组件螺母添加到装配体中并定位,如图5.10.15所示。......
2023-11-20

下面介绍该模具的设计过程。图11.5.1 水杯的模具设计Task1.初始化项目Step1.加载模型。图11.5.2 定义模具坐标系Step2.锁定模具坐标系。图11.5.5 选取分割面Step12.设定区域。图11.5.11 选取圆弧Stage5.创建分型面Step1.在“模具分型工具”工具栏中单击“设计分型面”按钮,系统弹出“设计分型面”对话框。在“设计分型面”对话框区域的中选择选项,方向如图11.5.13所示,在“设计分型面”对话框单击按钮,系统返回至“设计分型面”对话框。......
2023-11-20

范例概述此范例以一个机械基础──基座为载体讲述UG NX 9.0工程图创建的一般过程。希望通过此例的学习,读者能对UG NX 9.0工程图的制作有比较清楚的认识。图6.6.1 基座工程图Step2.插入图纸页。Task2.创建视图Step1.设置视图显示。确认“捕捉方式”工具栏中的按钮被按下,依次选取图6.6.3所示的圆弧1和圆弧2。在图6.6.4所示的位置单击放置半剖视图,单击中键完成。图6.6.16 选择边线2及放置尺寸图6.6.17 视图尺寸标注Task4.表面粗糙度标注Step1.选择命令。结果如图6.6.21所示。......
2023-11-20

Step1.打开文件D:\ug90\work\ch08.09\paster.prt。图8.9.2 “部件中的材料”窗口Step4.在“部件中的材料”中创建贴图文件材料。图8.9.3 “材料编辑器”对话框图8.9.4 “部件中的材料”窗口Step5.给零件添加金属材料。在“部件中的材料”窗口选中材料PICTURE并右击,在弹出的快捷菜单中选取命令,再选取图8.9.7所示的模型表面,单击中键确认;添加完成后的模型效果图像如图8.9.8所示。图8.9.9 添加材料后的模型图8.9.10 添加材料后的模型说明:在随书光盘中可以找到本例完成后的效果图。......
2023-11-20

Step2.在“型腔铣”对话框中单击“确认”按钮,系统弹出图12.2.27所示的“刀轨可视化”对话框。图12.2.27 “刀轨可视化”对话框图12.2.26 刀具轨迹图12.2.28 2D仿真结果:在图形窗口中显示所有刀具路径运动。刀具路径模拟有3种方式:刀具路径重播、动态切削过程和静态显示加工后的零件形状,它们分别对应于图12.2.27所示的“刀轨可视化”对话框中的、和选项卡。......
2023-11-20

Step3.定义图层组名。图3.6.8 “图层类别”对话框Step4.添加图层。Stage2.将各对象移至图层组图3.6.9所示为将对象移至图层组后的模型及相应的模型树。图3.6.10 “图层移动”对话框Stage3.设置图层组Step1.选择下拉菜单命令,系统弹出图3.6.11所示的“图层设置”对话框。选中图3.6.11所示的选项,单击按钮,将图层组21和31设置为不可见,然后单击按钮,完成图层的设置。图3.6.11 “图层设置”对话框......
2023-11-20
来自体的曲线主要是从已有模型的边,相交线等提取出来的曲线,主要类型包括相交曲线、截面线和抽取曲线等。图4.1.59 “相交曲线”对话框2.截面曲线使用命令可在指定平面与体、面、平面和(或)曲线之间创建相关或不相关的相交曲线。下面以图4.1.60所示的例子来介绍创建截面曲线的一般过程。Step3.单击按钮,系统弹出图4.1.63所示的“单边曲线”对话框。......
2023-11-20
相关推荐