【摘要】:连杆相互连接,构成运动机构,它在整个机构中主要是进行运动的传递等。Step4.选择下拉菜单命令,系统弹出图9.2.3所示的“连杆”对话框。Step5.在的提示下,选取图9.2.4所示的部件为连杆。Step6.在“连杆”对话框中单击按钮,完成连杆的指定。图9.2.3 “连杆”对话框图9.2.4 选取连杆图9.2.3所示“连杆”对话框的选项说明如下:●:该区域用于选取零部件作为连杆。
连杆是具有机构特征的刚体,它代表了实际中的杆件,所以连杆就有了相应的属性,如质量、惯性、初始位移和速度等。连杆相互连接,构成运动机构,它在整个机构中主要是进行运动的传递等。
下面以一个实例来讲解指定连杆的一般过程。
Step1.打开文件D:\ug90\work\ch09.02\assemble.prt。
Step2.选择

 命令,进入运动仿真模块。
命令,进入运动仿真模块。
Step3.新建仿真文件。
(1)在“运动导航器”中右击 ,在弹出的快捷菜单中选择
,在弹出的快捷菜单中选择 命令,系统弹出图9.2.1所示的“环境”对话框。
命令,系统弹出图9.2.1所示的“环境”对话框。
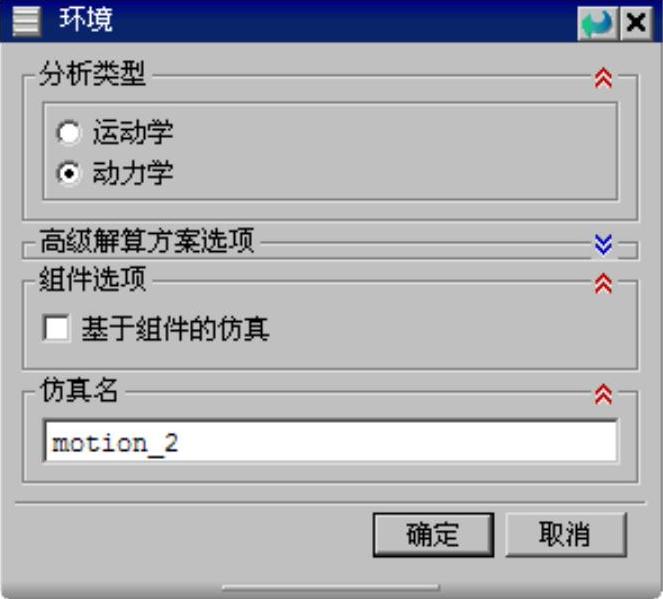
图9.2.1 “环境”对话框
图9.2.1所示的“环境”对话框说明如下:
● :选中该单选项,指在不考虑运动原因状态下,研究机构的位移、速度、加速度与时间的关系。
:选中该单选项,指在不考虑运动原因状态下,研究机构的位移、速度、加速度与时间的关系。
● :选中该选项,指考虑运动的真正因素,即力、摩擦力、组件的质量和惯性及其他影响运动的因素。
:选中该选项,指考虑运动的真正因素,即力、摩擦力、组件的质量和惯性及其他影响运动的因素。
(2)在“环境”对话框中选中 单选项,单击
单选项,单击 按钮,在系统弹出的图9.2.2所示的“机构运动副向导”对话框中单击
按钮,在系统弹出的图9.2.2所示的“机构运动副向导”对话框中单击 按钮。
按钮。
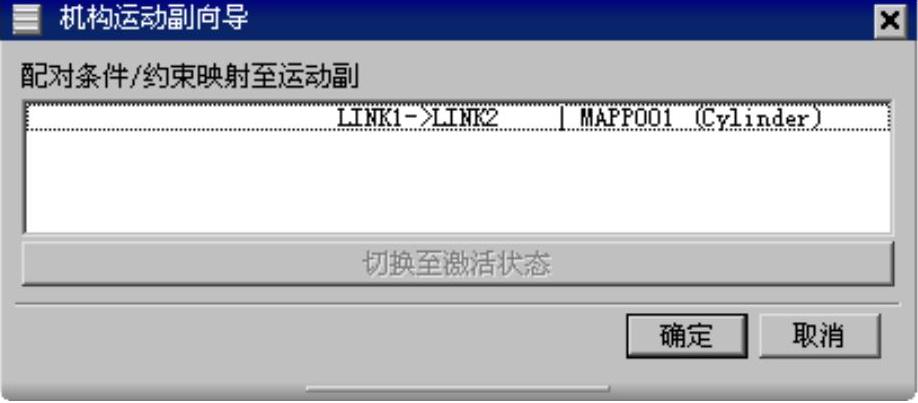
图9.2.2 “机构运动副向导”对话框
图9.2.2所示的“机构运动副向导”对话框说明如下:
● :单击该按钮,接受系统自动对机构进行分析而生成的机构运动副向导,且为系统中的每一个相邻零件创建一个运动副,这些运动副可以根据分析需要进行激活或不激活。
:单击该按钮,接受系统自动对机构进行分析而生成的机构运动副向导,且为系统中的每一个相邻零件创建一个运动副,这些运动副可以根据分析需要进行激活或不激活。
● :单击该按钮,不接受系统自动生成的机构运动副。
:单击该按钮,不接受系统自动生成的机构运动副。
Step4.选择下拉菜单

 命令,系统弹出图9.2.3所示的“连杆”对话框。
命令,系统弹出图9.2.3所示的“连杆”对话框。
Step5.在 的提示下,选取图9.2.4所示的部件为连杆。(www.chuimin.cn)
的提示下,选取图9.2.4所示的部件为连杆。(www.chuimin.cn)
Step6.在“连杆”对话框中单击 按钮,完成连杆的指定。
按钮,完成连杆的指定。
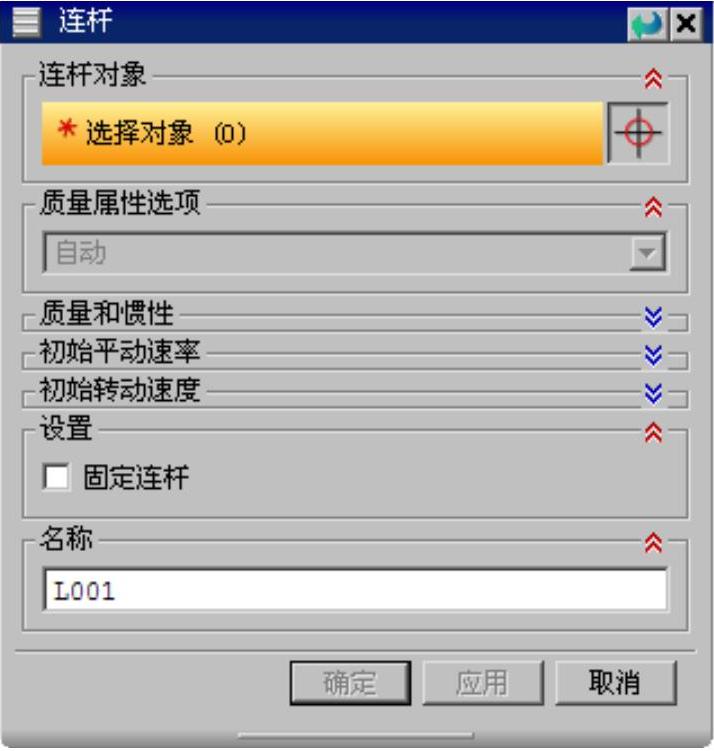
图9.2.3 “连杆”对话框
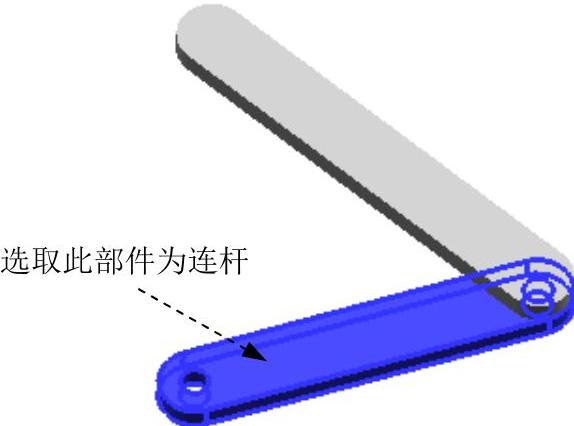
图9.2.4 选取连杆
图9.2.3所示“连杆”对话框的选项说明如下:
● :该区域用于选取零部件作为连杆。
:该区域用于选取零部件作为连杆。
● :用于设置连杆的质量属性。
:用于设置连杆的质量属性。
☑ :选择该选项,系统将自动为连杆设置质量。
:选择该选项,系统将自动为连杆设置质量。
☑ :选择该选项,将由用户设置连杆的质量。
:选择该选项,将由用户设置连杆的质量。
● :在
:在 区域的下拉列表中选择
区域的下拉列表中选择 选项后,
选项后, 区域中的选项即被激活。
区域中的选项即被激活。
☑ :用于设置质量的相关属性。
:用于设置质量的相关属性。
☑ :用于设置连杆惯性矩的相关属性。
:用于设置连杆惯性矩的相关属性。
● :用于设置连杆最初的移动速度。
:用于设置连杆最初的移动速度。
● :用于设置连杆最初的转动速度。
:用于设置连杆最初的转动速度。
● :用于设置连杆的基本属性。
:用于设置连杆的基本属性。
☑ :选中该复选框后,连杆将固定在当前位置不动。
:选中该复选框后,连杆将固定在当前位置不动。
☑ :通过该文本框可以为连杆指定一个名称。
:通过该文本框可以为连杆指定一个名称。





相关推荐