提供内部上电自动复位电路,当外加电源电压超过4.5V时,自动对模块进行初始化操作,将模块设置为默认的显示工作状态。1602LCD芯片逻辑工作电压4.5~5.5V,LCD驱动电压3~5V,最佳工作电压5.0V,显示容量16×2个字符;工作电流2.0mA;字符尺寸2.95×4.35(W×H)mm。表14-1 LCD1602引脚描述第1引脚:VSS为地电源。LCD1602基本操作时序见表14-2。......
2023-11-04
完整的步进电动机控制系统包括控制器、驱动器、电动机三部分构成。系统结构框如图15-2所示。

图15-2 步进电动机控制系统框图
步进电动机正常工作需要提供具有一定驱动能力的脉冲信号,脉冲信号由单片机输出的激励信号经过脉冲分配器产生,脉冲分配可以通过软件方便灵活地实现,也可以由硬件脉冲分配电路实现。随着大规模集成电路技术的发展,现在很多厂家生产硬件脉冲分配与驱动器集成在一起的芯片,方便电路设计。本设计涉及小型步进电动机驱动电路选用ULN2003,ULN2003是高压大电流达林顿晶体管阵列系列产品,具有电流增益高、工作电压高、温度范围宽、带负载能力强等特点,适应于各类要求高速大功率驱动的系统,ULN2003内部结构及等效电路图如图15-3所示。
引脚介绍如下:
引脚1:CPU脉冲输入端,端口对应一个信号输出端。
引脚2:CPU脉冲输入端。
引脚3:CPU脉冲输入端。
引脚4:CPU脉冲输入端。
引脚5:CPU脉冲输入端。
引脚6:CPU脉冲输入端。
引脚7:CPU脉冲输入端。
引脚8:接地。
引脚9:该脚是内部7个续流二极管负极的公共端,各二极管的正极分别接各达林顿管的集电极。用于感性负载时,该脚接负载电源正极,实现续流作用。如果该脚接地,实际上就是达林顿管的集电极对地接通。
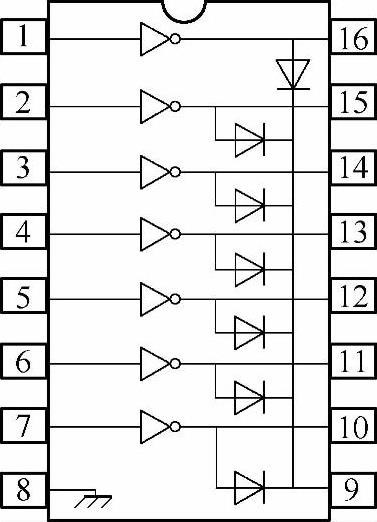
图15-3 ULN2003引脚图
引脚10:脉冲信号输出端,对应7脚信号输入端。(www.chuimin.cn)
引脚11:脉冲信号输出端,对应6脚信号输入端。
引脚12:脉冲信号输出端,对应5脚信号输入端。
引脚13:脉冲信号输出端,对应4脚信号输入端。
引脚14:脉冲信号输出端,对应3脚信号输入端。
引脚15:脉冲信号输出端,对应2脚信号输入端。
引脚16:脉冲信号输出端,对应1脚信号输入端。
单片机控制电动机正、反转电路采用ULN2003芯片驱动步进电动机,驱动电流放大,其中单片机的P2.0~P2.3口与ULN2003相连,ULN2003输出引脚16、15、14、13连接到步进电动机端,驱动电动机转动。
电动机正、反转的环形脉冲分配表见表15-4、表15-5。
表15-4 电动机正转环形脉冲分配表

表15-5 电动机反转环形脉冲分配表

其设计的电动机正、反转硬件电路如图15-4所示。
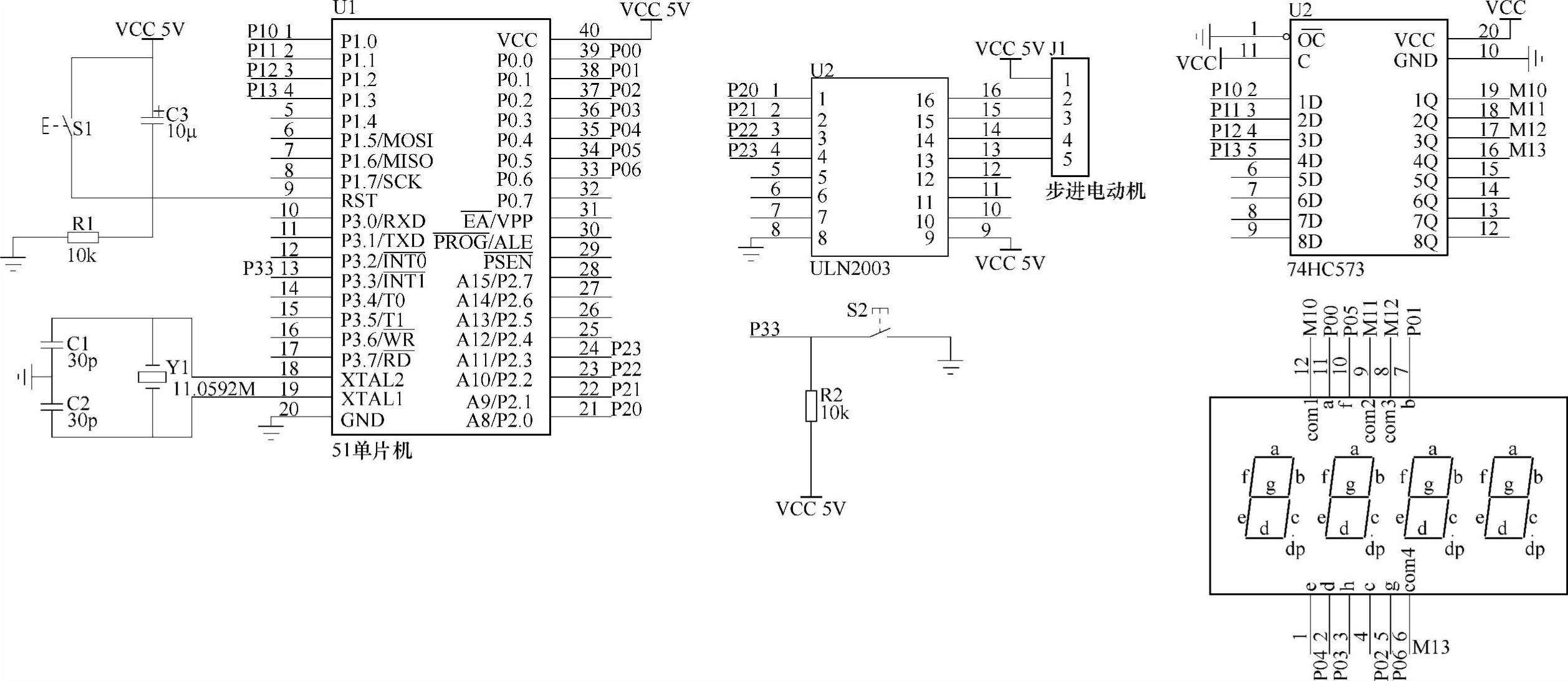
图15-4 电动机正、反转硬件电路原理图
有关51单片机初级入门实战教程的文章

提供内部上电自动复位电路,当外加电源电压超过4.5V时,自动对模块进行初始化操作,将模块设置为默认的显示工作状态。1602LCD芯片逻辑工作电压4.5~5.5V,LCD驱动电压3~5V,最佳工作电压5.0V,显示容量16×2个字符;工作电流2.0mA;字符尺寸2.95×4.35(W×H)mm。表14-1 LCD1602引脚描述第1引脚:VSS为地电源。LCD1602基本操作时序见表14-2。......
2023-11-04
可调电容调整完毕后无法封固,因为无论导体还是绝缘体,各种介质的靠近或侵入都会使电容的容量发生变化,进而影响接收频率。当无线接收模块接收到空间的315MHz信号时,经放大、变频、滤波等处理后输出控制信号,送到第14脚进行解码。图18-11 复位电路图18-12 振荡电路图单片机晶振的作用是为系统提供基本的时钟信号。......
2023-11-04

图10-3 中断方式T0控制LED程序流程图用定时器T0方式1编写程序,即采用中断方式设计的程序流程图如图10-3所示。在图10-3程序流程图的基础上书写中断实现T0控制LED闪烁程序代码如下:结合2.3节关于单片机开发环境Keil C51的学习,建立工程time文件,并将上述代码在Keil环境下进行编译,程序成功编译结果如图10-4所示。同时在创建工程路径time1文件夹下生成一个扩展名为.hex文件,供下载软件将生成的.hex文件下载到单片机中。......
2023-11-04

CPU对中断处理过程包括中断初始化、中断响应、保护现场、中断服务程序处理、中断撤销和中断返回。所以在进入中断服务子程序后,一般都要保护现场,再执行中断服务程序,返回主程序前再恢复现场,用户在编制中断处理程序时必须要考虑上述问题。......
2023-11-04

DS18B20数字温度计是DALLAS公司生产的1—Wire,即单总线器件,具有线路简单,体积小特点。报警搜索命令识别并标志超过程序限定温度的器件。图23-5 DS18B20读时序图23-6 DS18B20写时序温度采集电路连接到单片机的P3.7引脚,I/O口上通过R3上拉到VCC。当温度转换命令发布后,经转换所得的温度值以二字节补码形式存放在高速暂存存储器的第0和第1个字节。......
2023-11-04

所谓的函数调用就是在一个函数体中引用另外一个已经定义的函数,前者为主调函数,后者为被调用函数。这种情况是把该函数的返回值作为实参进行传送,因此要求该函数必须是有返回值。因此在以后各主调函数中不用对ann和circle函数说明,可直接调用。......
2023-11-04

函数名由用户自定义,后面是空括号,代表没有函数参数,即代表无参函数,注意空括号不可以省略。函数被调用时,主调函数将通过实际参数,简称实参,传递实际的值给这些形参。3)函数定义时没有写明类型标识符,则默认为整型。......
2023-11-04

③if-else-if形式:当有多个分支选择时,采用if-else-if语句,形式为if语句1;else if语句2;else if语句3;…使用switch语句时注意以下几点:①case后的各常量表达式的值是不一样的,否则会出现错误。②在case后,允许出现多条语句,可以不用{}括起来。③各case和default语句位置的先后顺序可以改变,而不会影响程序执行结果。......
2023-11-04
相关推荐