当驾驶员挂入倒挡后,倒车雷达侦测器进入自我检测。倒车雷达装置由倒车雷达侦测器、控制器和蜂鸣器等组成。倒车雷达侦测器安装在车辆后部保险杠上,如图3-26所示。控制器接收从侦测器传来的信号,经计算判断障碍物离车尾的距离,若达到报警位置,就传送信号给蜂鸣器。......
2025-09-30
雷达是集中了现代电子科学技术各种成就的高科技系统,现在已经广泛应用于地面(含车载)、舰载、机载和弹载方面,执行着各种军事任务和民用任务。近年来,雷达应用已经向外层空间发展,出现了面向卫星载、航天飞机载、宇宙飞船载等应用的空间基雷达,建立比地面预警雷达、机载预警雷达和超视距预警雷达更优越的星载预警监视雷达。同时,雷达也在向空间相反方向发展,出现了各种探地雷达,它已经应用于探雷、资源勘探、地下构造“窥探”、地下危险物品侦察以及探月等方面。另外,在民用各部门,如气象与天文、遥感遥测、船只导航、直升机、汽车防撞、交通管制等领域,雷达的应用也越来越广泛。典型雷达应用场景如图1-1所示。

图1-1 典型雷达应用场景
雷达(Radar)是“Radio Detection and Ranging”缩写的音译,是一种通过发射电磁波和接收目标回波,对目标进行探测和测定目标信息(距离、距离变化率或径向速度、方位、高度等)的设备,其工作原理与功能框图如图1-2和图1-3所示。
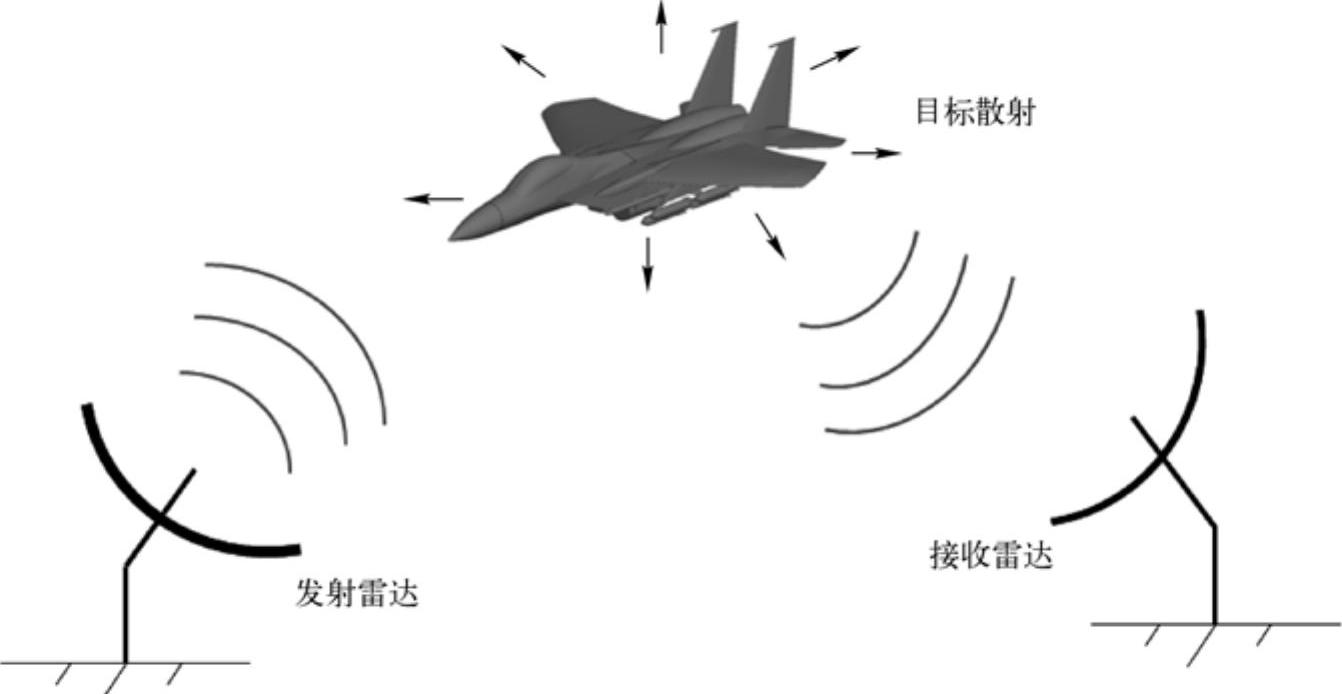
图1-2 雷达工作原理示意图
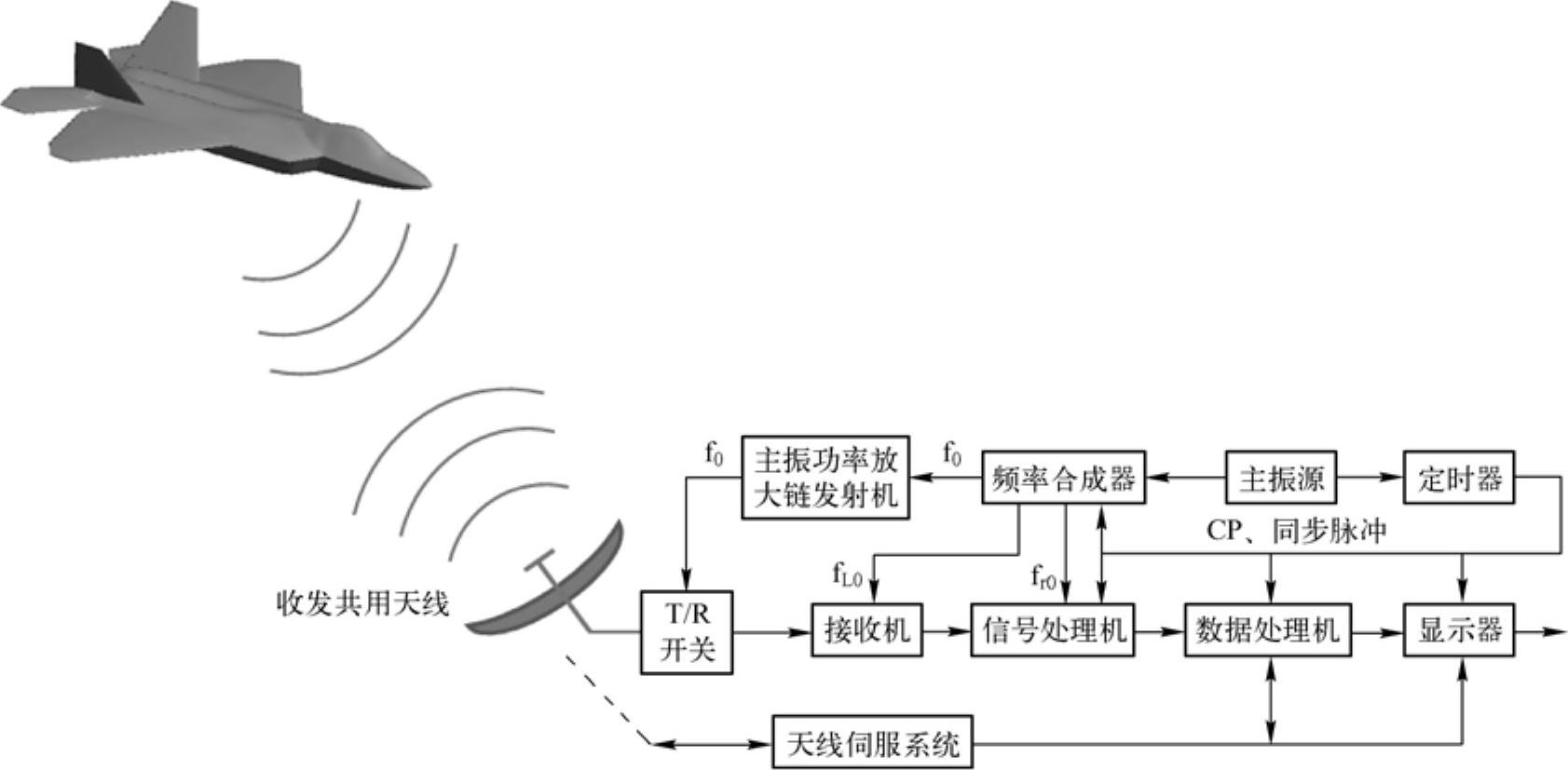
图1-3 雷达功能框图
雷达主要战术参数和定义介绍如下:
1)探测空域。指雷达能够以一定的检测概率和虚警概率、一定的目标起伏模型和一定的目标雷达截面积探测到目标的空间。它是由雷达最大探测距离、最小探测距离、方位扫描角、俯仰扫描角所构成的空间。
2)目标参数测量。目标参数包括目标距离、方位角、俯仰角(或高度)、速度、批次、机型和敌我识别等,精确地测量目标的空间坐标是雷达的主要任务。
3)分辨力。雷达分辨力是指雷达能分辨空间两个靠近目标的能力。
①距离分辨力。指在同一个方位上,能够区分两个在距离上比较靠近目标T1和T2的最小距离ΔR, ,其中τ为雷达发射脉冲宽度。示意图如图1-4a所示。
,其中τ为雷达发射脉冲宽度。示意图如图1-4a所示。
②方位/俯仰角分辨力。指在同一距离上,能够区分两个在方位/俯仰上比较靠近目标T1和T2的最小角度Δθ,Δθ是雷达天线半功率点波束角。示意图如图1-4b所示。
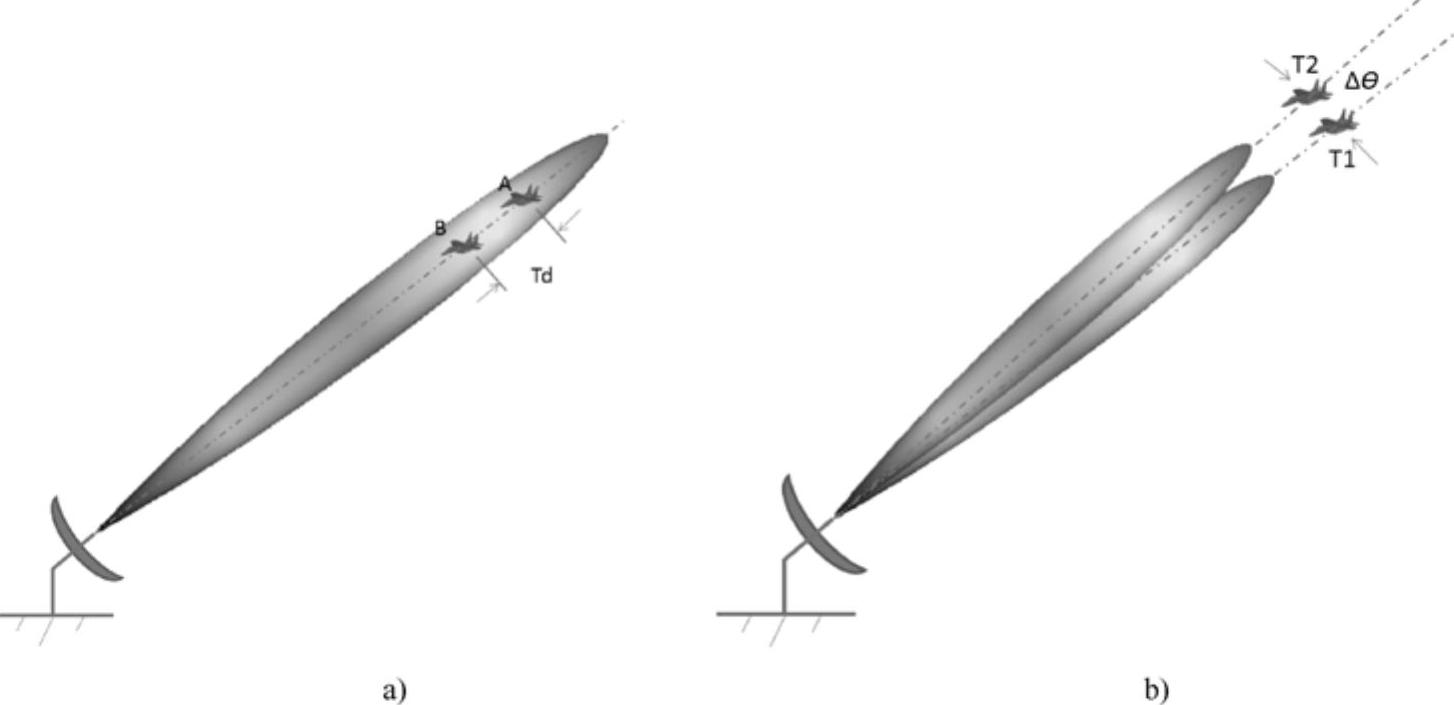
图1-4 分辨力
a)距离分辨力示意图 b)方位/俯仰角分辨力示意图
注:Δθ方位=θ方位0.5,Δθ俯仰=θ俯仰0.5
4)雷达抗干扰能力。指雷达在电子战环境中采取各种对抗措施后,雷达生存或自卫距离改善的能力。
雷达的主要技术参数和定义介绍如下:
1)雷达工作频率——f0。(https://www.chuimin.cn)
2)雷达发射脉冲功率——Pt。
3)脉冲信号参数。雷达不模糊的最大测量距离是Rmax=0.5c(0.8Tr),其中c是光速,Tr是发射脉冲的重复周期。
4)雷达天线参数。天线形式包括线天线、面天线、平板裂缝天线、阵列天线等。
①反射面/阵面尺寸。
②主波束增益G。
③第一副瓣电平和平均副瓣电平。
④天线波束形状、主波束宽度θ方位0.5和θ俯仰0.5等。
5)接收机灵敏度。指雷达以一定的检测概率和虚警概率所能探测到目标的最小回波信号功率,即Pmin=kT0BnFn(S/N0)min。式中,k是玻耳兹曼常数;T0为等效噪声温度;Bn为等效噪声带宽;Fn为噪声系数;(S/N0)min为能够探测到目标的最小信噪比。
6)雷达抗干扰技术等。
雷达距离方程,对于单基地雷达收发共用天线 。式中,Pt为发射机发射功率;G为收发天线增益;λ为雷达工作波长;σ为目标雷达散射截面积;R为雷达与目标间距。
。式中,Pt为发射机发射功率;G为收发天线增益;λ为雷达工作波长;σ为目标雷达散射截面积;R为雷达与目标间距。
根据接收机信号检测理论:
当Pr>Simin时,雷达才能可靠地检测到目标。
当Pr=Simin时,雷达发现目标的最大探测距离Rmax。
当Pr<Simin时,雷达不能检测到目标。
所以 ,其中
,其中 。
。
用信噪比表示雷达方程:
因为 。
。
所以 。
。
由方程可以得出:最大探测距离Rmax与发射机输出脉冲功率的四次方根成正比,与接收机灵敏度(Simin)的四次方根成反比,与天线增益或有效接收面积的平方根成正比,与目标雷达散射截面积的四次方根成正比,与接收机的噪声系数以及显示器的识别系数的四次方根成反比。
不难想象,与雷达相关的应用包含了天线与天线罩、雷达的隐身/反隐身、电波传播等。
相关文章

当驾驶员挂入倒挡后,倒车雷达侦测器进入自我检测。倒车雷达装置由倒车雷达侦测器、控制器和蜂鸣器等组成。倒车雷达侦测器安装在车辆后部保险杠上,如图3-26所示。控制器接收从侦测器传来的信号,经计算判断障碍物离车尾的距离,若达到报警位置,就传送信号给蜂鸣器。......
2025-09-30

图5-32示波器1.通用示波器通用示波器采用单束示波管,是频带较宽的示波器,常用的是双踪示波器。通用示波器的使用较为广泛,可对一般的电信号进行定性、定量的分析与测量。......
2025-09-29

根据工程建设的特点,编制工程造价指数是解决这些问题的最佳途径。正确编制的工程造价指数,不仅能较好地反映工程造价的变动趋势和变化幅度,而且可用以剔除价格水平变化对工程造价的影响,客观反映建设市场的供求关系和生产力发展水平。工程造价指数反映了报告期与基期相比的价格变动程度和趋势,在工程造价管理中,工程造价指数具有以下作用。......
2025-09-29

基于ADAMS整车环境模式下对制动系统进行研究可以取得较好的效果,其仿真结果可以作为设计制造制动器的依据,同时也可以验证不同制动控制算法的优劣。ADAMS/CAR中商用牵引车三轴系制动系统中(6×4)制动力矩函及牵引车附加拖车(5轴系)制动力矩函同上述相同,其制动系统模型如图7-2~图7-3所示。图7-2商用车制动系统模型图7-3商用车附带拖车制动系统模型......
2025-09-30

同时找到倒车灯线准备与前主机相连。车内温度传感器应远离发热机件及空调出风口,以免对其造成影响。前2探头探测范围分为大于0.4m、0.3~0.4m、小于0.3m等几种情况。图6-50 前后探头探测范围分区向前泊车时点火开关处于“ACC.ON”位置,每次踩制动踏板,系统自动启动。图6-53 擦角警示(三)显示器安装与使用1.显示器安装安装于仪表板、前风窗玻璃或空调出风口处,如图6-54所示。若安装于空调出风口,一定要按规定装好嵌夹。......
2025-09-30
螺纹术语是螺纹技术领域规定的统一用语。GB/T 14791—1993《螺纹术语》给出了螺纹各要素的术语定义,是制定各种螺纹参数标准的基础,也是正确理解螺纹技术内容的依据。......
2025-09-29

而目前主流的感知方式,则是依靠雷达、摄像头和激光雷达这三大传感器系统实现的。最理想的当然是激光雷达,但它的价格基本上直逼一辆小轿车。特斯拉的逻辑是,采集每一位车主的驾驶数据,用于训练自己的自动驾驶系统。通过这样的方式,特斯拉凭借海量的数据,逐渐将自己的自动驾驶能力提升到了L3级别,这让业内非常震惊。在他看来,激光雷达昂贵的价格阻碍了自动驾驶的普及。2020年,自动驾驶领域很有可能取得爆炸式发展。......
2025-09-29

因而系统工程的定义呈现出多样性。国内外学者从系统工程研究对象、研究方法、研究内容、研究目的等方面来定义系统工程。1)美国学者H.Chestnut认为:系统工程学是为了研究由多个子系统构成整体系统所具有的多种不同目标的相互协调,以期系统功能最优化,最大限度地发挥系统组成部分能力而发展起来的一门科学。9)美国科学技术字典的定义:系统工程是研究彼此密切联系的许多要素所构成的复杂系统设计的科学。......
2025-09-29
相关推荐