然而在舞蹈表演中,舞者经常以各种方式弯曲、倾斜或旋拧他们的躯干,通过这样的动作来表现富有魅力的形体之声。和Yu轴之间的夹角θLE表示左大臂的“倾斜”状态。......
2023-10-29
针对要进行训练的动作样本库,我们在训练前做出了如下设置:两种类型的特征向量分别作为输入向量进行训练。在本书中,我们仅就基于C2a的参数设置的S-SOFM模型的训练结果进行探讨(见表2-1)。
表2-1 S-SOFM训练配置参数

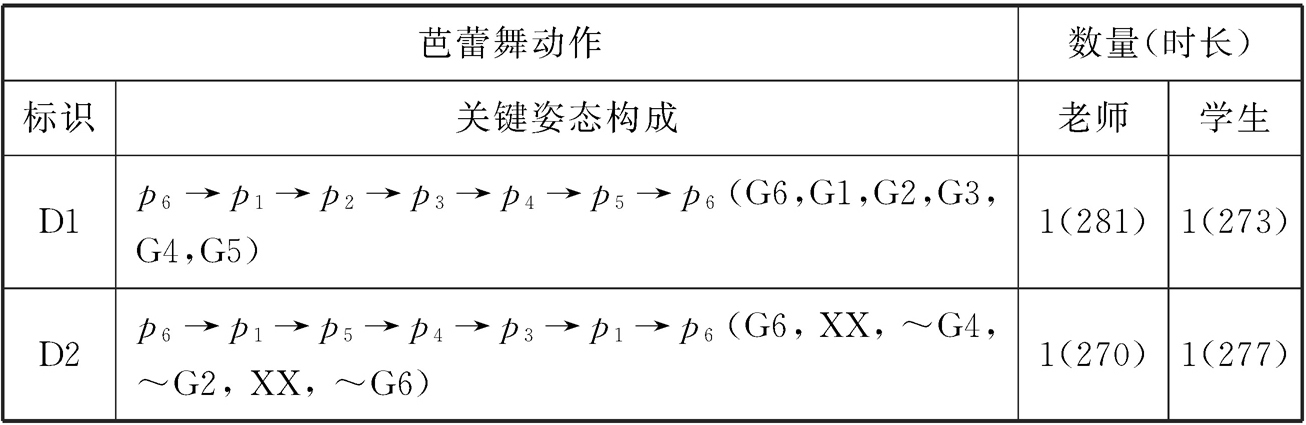
在训练S-SOFM的过程中,我们构建了两个芭蕾舞动作库:其中一个库如表2-2所示,包含6个独立的动作(即G1-G6的每个动作都有单独的记录,独立于其他动作),每个动作都是由老师和学生分别做出的,学生的动作速度和肢体形态与老师的动作之间存在一定的差异(学生动作会用于测试)。此外,在表2-2中,我们还对每类动作进行了详细的描述,包含关键姿态、动作时长等,例如动作G1就是从第一个姿态变化到第二个姿态的舞蹈动作。图2-12详细地描绘了芭蕾舞中的6个基本造型。为了评估识别子系统对连续的舞蹈动作的在线识别能力,我们又创建了第二个动作数据库,见表2-3。在这个动作库中,我们收集了两个不同的组合舞蹈动作序列(D1和D2)。在实验中,我们把注意力集中在了D1上(所有的动作单元在我们的训练姿态空间中都有所表现)。
表2-2 动作库1
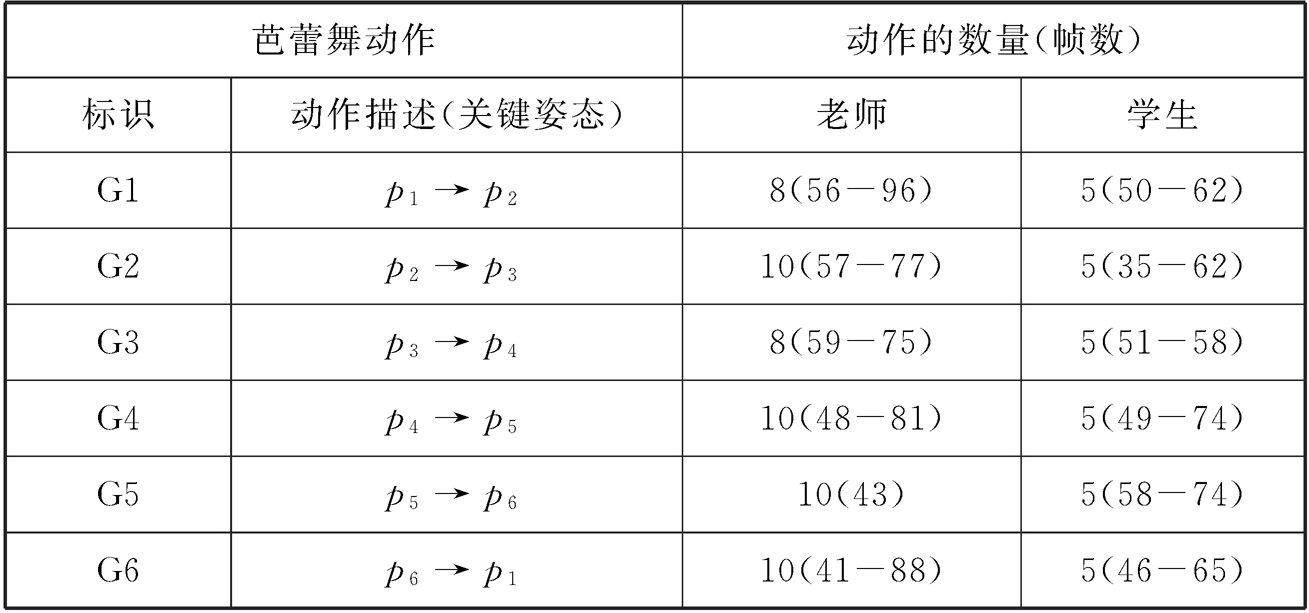
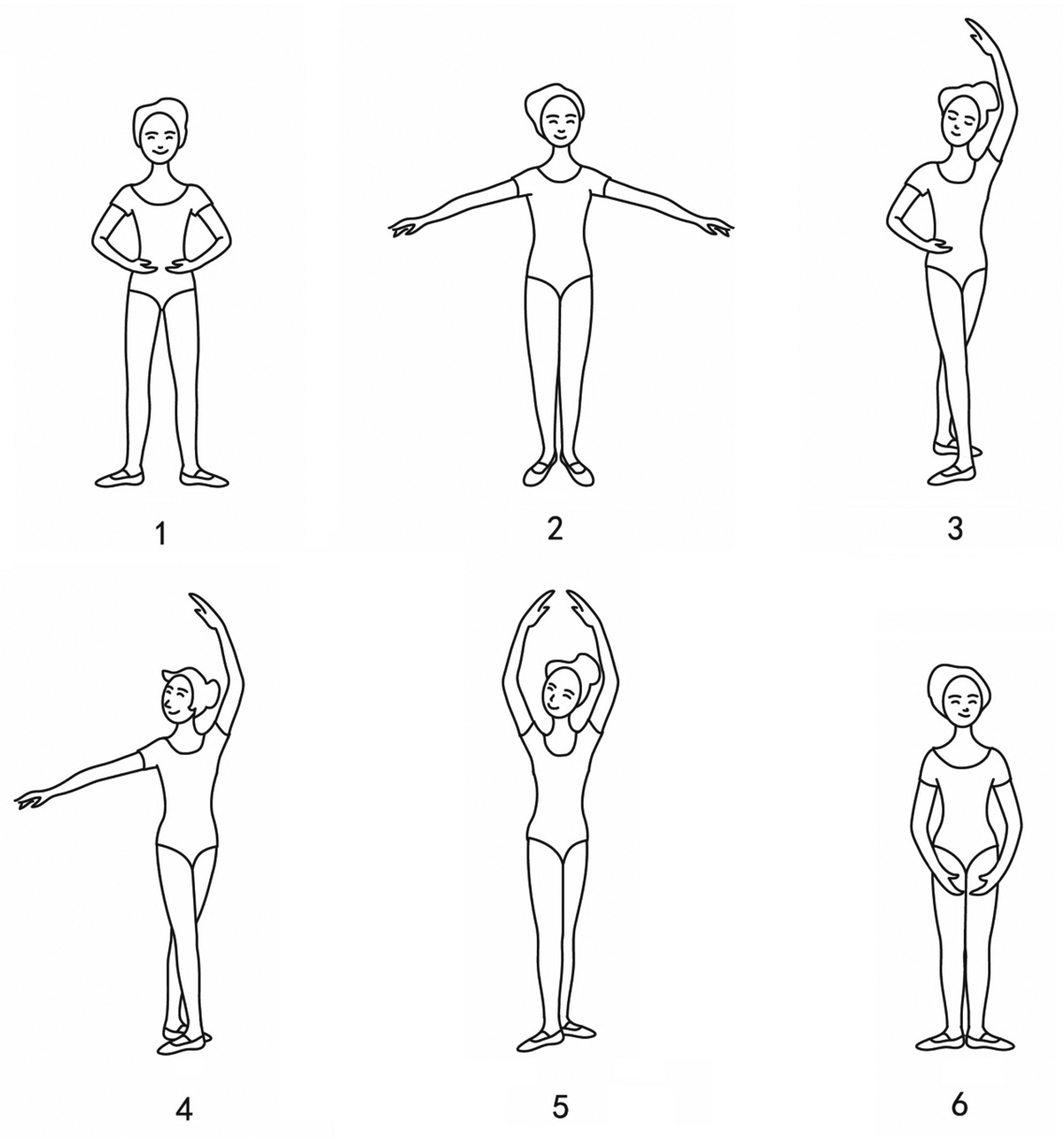
图2-12 芭蕾舞中的6个基本造型
表2-3 动作库2
在第一组实验中,我们将观察重复的动作(同样的动作内容,不同的动作序列)投射到S-SOFM模型中会产生什么样的变化。在图2-13中,每幅图都代表一个重复动作的映射效果,表示动作G11—G44在S-SOFM模型上的一系列映射结果。从图中可以直观地看到,每类动作在球体上所呈现的独特但相似度较高的轨迹。即使动作时长相差较大(在时长上的差异性高达40%),动作轨迹仍旧表现出一定的稳定性,这也体现了从姿态序列映射到姿态空间的一致性。轨迹上的实心标记分别代表动作的起点和动作的终点。由于不同类别的动作训练得到的路径具有自己的独特性,因此这些轨迹(动作)之间的高差异性有效地保证了动作识别效果。

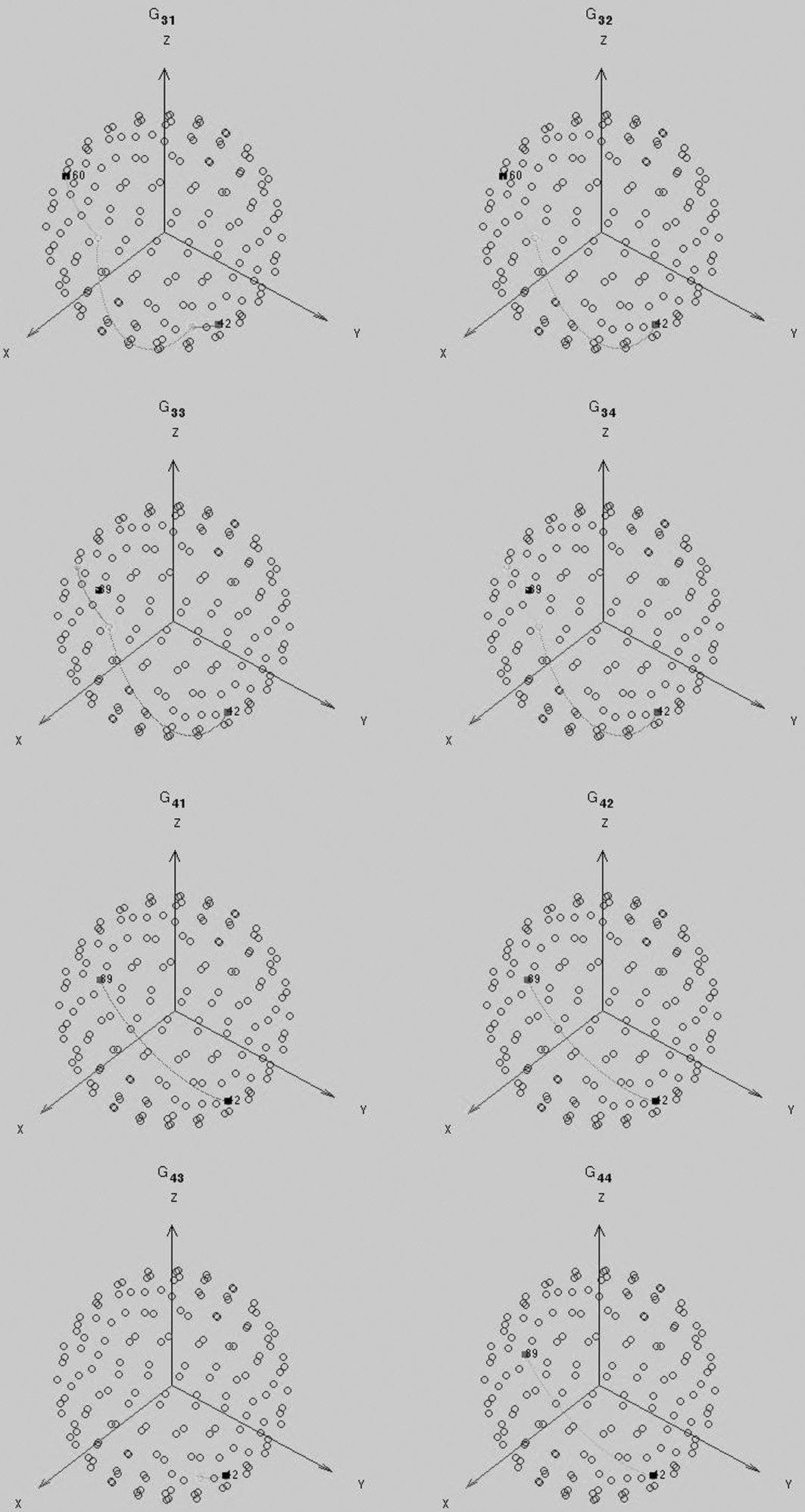
图2-13 G11—G44的动作轨迹
为评价我们所构建的S-SOFM输出空间的合理性,及动作模板和匹配标准的识别效果,我们利用动作数据库中的动作模板对基本舞蹈动作单元的识别进行第二组实验。在这个实验环节中,我们考虑了两个测试方案:第一个方案使用的训练样本与测试样本的比例为20%∶80%,第二个方案使用的比例为40%∶60%。换句话说,老师动作集合中的20%(也就是在每类动作中,从10个重复动作中选2个)被随机选中,用来作为动作模板,通过相似性度量法对剩下的80%参照样本进行识别判定。这个过程被重复了10次,并且我们对每个类别分类的准确度都进行了记录。这里的模板相似性通过以下3个距离来度量:L1(绝对值距离)、L2(欧式距离)和L3(直方图相交距离)。
L1距离的定义如下:

L2距离的定义如下:

L3距离的定义如下:

第二个实验方案的执行过程完全一样,只不过训练生成动作单元模板的动作集在动作库中的比例变为40%,而剩下的60%用来测试识别能力。基于不同的动作模板的实验结果见表2-4至表2-7。
表2-4 基于舞蹈姿态频率统计模板的识别率

表2-5 基于舞蹈姿态稀疏编码模板的识别率
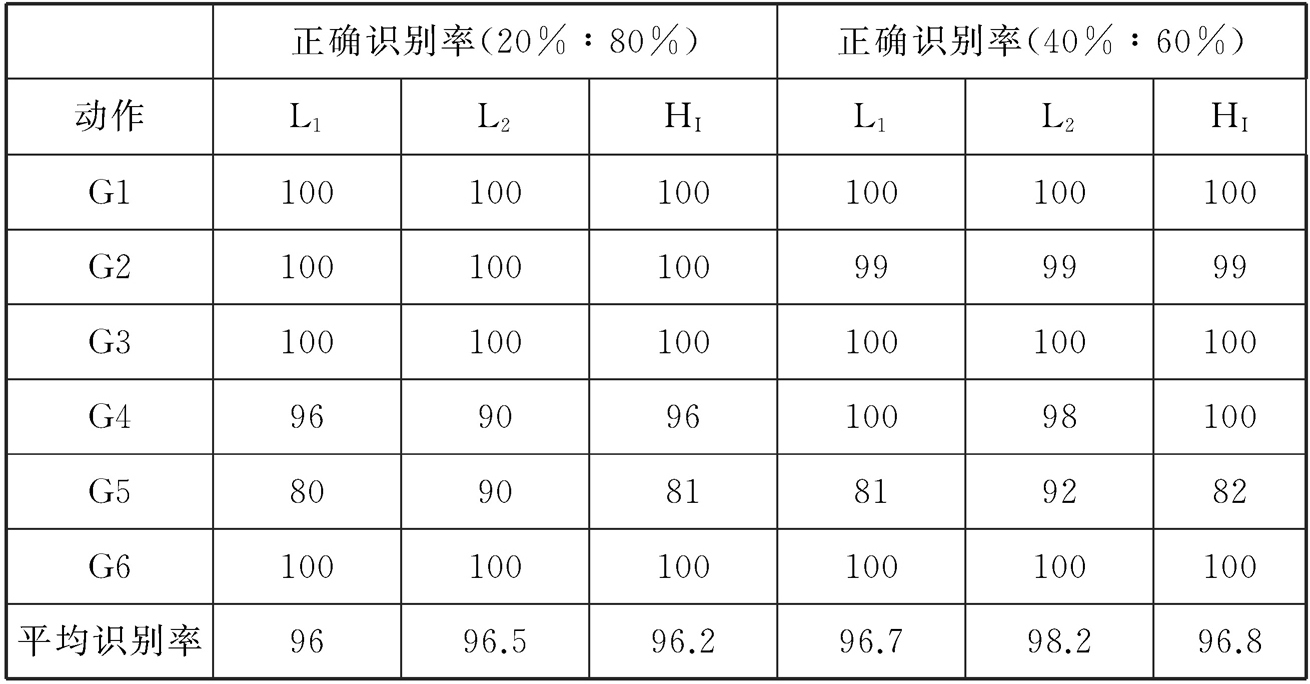
表2-6 基于舞蹈姿态转换矩阵模板的识别率
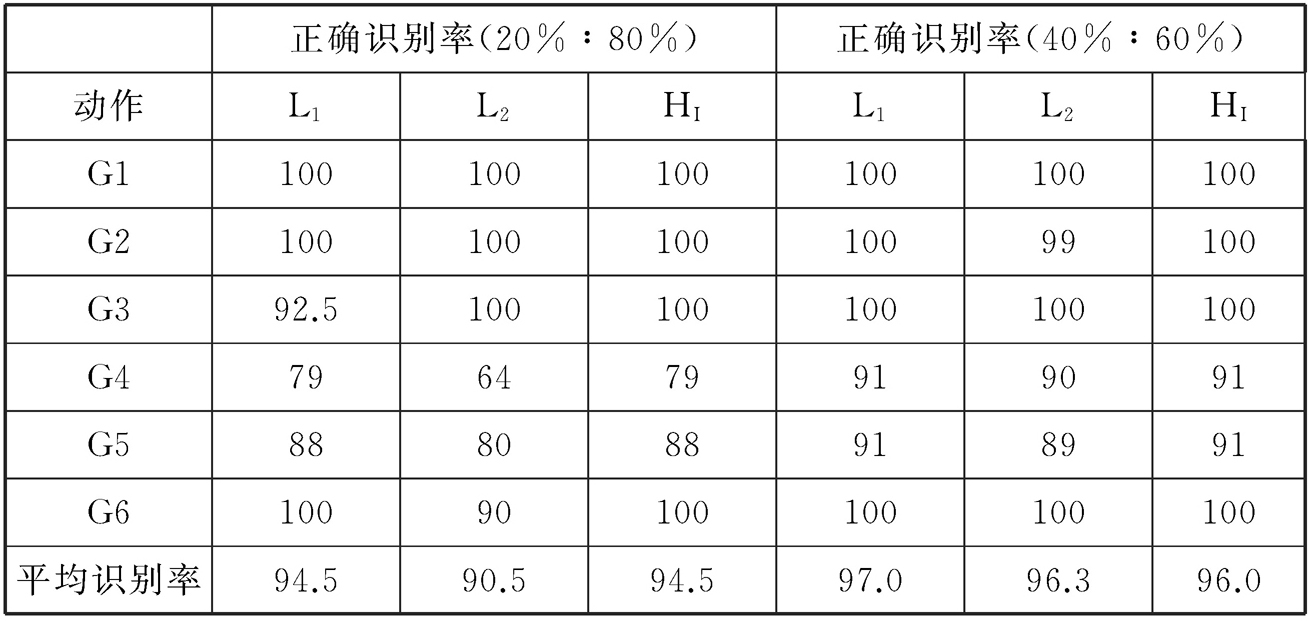
表2-7 基于舞蹈姿态转换矩阵稀疏编码模板的识别率
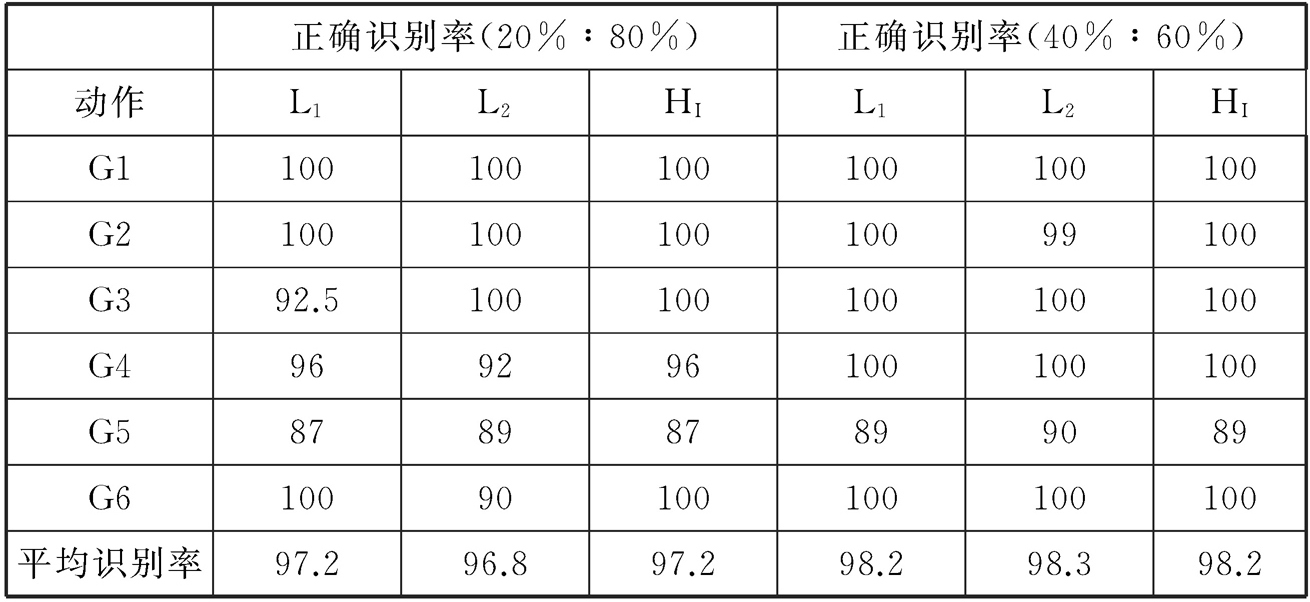
从表2-4到表2-7的数据中我们可以看出,由于动作相对简单,所以整体识别率都很高,这说明该方法对单动作检测有效,尤其是G1、G2、G3和G6四个舞蹈片段,它们的整体识别率相对较高。此外,从动作模板的构建方法上看,用稀疏编码构建的动作模板使用相似性度量方法会提升识别的效果,姿态转换矩阵稀疏编码整体表现最好。
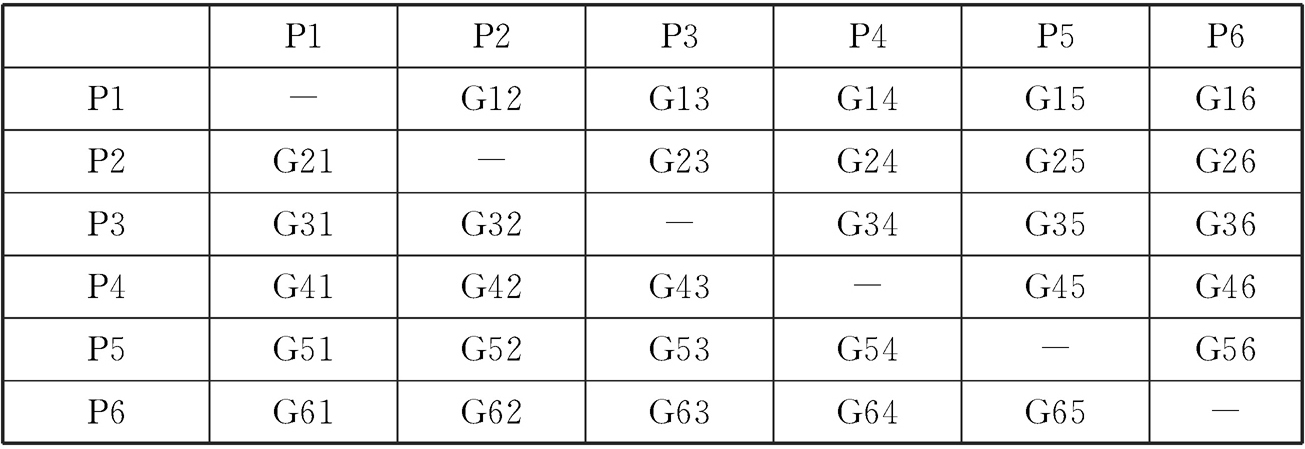
在第三组实验中,我们使用了更加丰富的舞蹈动作来评估我们所提出的识别方法。首先,我们定义了一个新的动作单元,它是由前面所介绍的基础关键姿态随机组合而成的。如表2-8所示,6个关键姿态构建了一组N个动作,其中 ,每个动作片段都是由其所对应的纵列的姿态和所对应的横列的姿态组合而成的,也就是说,动作Gij表示该动作是从姿态Pi转换到姿态Pj的动作片段。
,每个动作片段都是由其所对应的纵列的姿态和所对应的横列的姿态组合而成的,也就是说,动作Gij表示该动作是从姿态Pi转换到姿态Pj的动作片段。
表2-8 30个动作的姿态构成
然后,基于上面的动作单元,我们构建了两个动作集合(如表2-9所示),集合1包含15个独立的动作,集合2包含和集合1的15个动作的关键姿态顺序相反的另外15个独立的动作,这样加在一起,总共30个动作。所有的舞蹈动作分别由老师、学生A、学生B来表演,每个动作执行10次,因此,一共有900个动作片段。
表2-9 动作集合1和动作集合2
 (www.chuimin.cn)
(www.chuimin.cn)
我们先使用动作集合1。老师和学生A的动作会用于舞蹈动作的标准模板的构建和测试,而学生B的动作仅用于测试。因此,学生B的动作在进行系统训练的时候并不产生任何作用。为了评估S-SOFM模型的识别性能,系统按照(50%∶100%)的比例对样本进行训练。也就是说,从老师动作集合和学生A的动作集合中各随机选择50%的动作作为训练样本,以训练产生的结果作为被标识的动作模板,然后用其与其他输入动作进行相似性度量。
表2-10显示,对于更多种类的动作的识别效果,从整体上看,姿态频率统计(PF)动作模板和姿态转换矩阵(PT)动作模板的识别性能相对比较理想。当系统将姿态转换矩阵(PT)作为动作模板,把L3直方图交叉距离作为相似性匹配准则,同时把姿态频率统计(PF)作为动作模板、L2欧氏距离作为相似度匹配准则时,这两个方法的组合对于老师和学生A的动作识别率达到了98%。此外,使用学生B的舞蹈动作来做测试时,同样的组合的平均识别精确度高达92%,这表明训练系统在识别未知数据上具备泛化能力。
表2-10 第三组实验的识别率统计
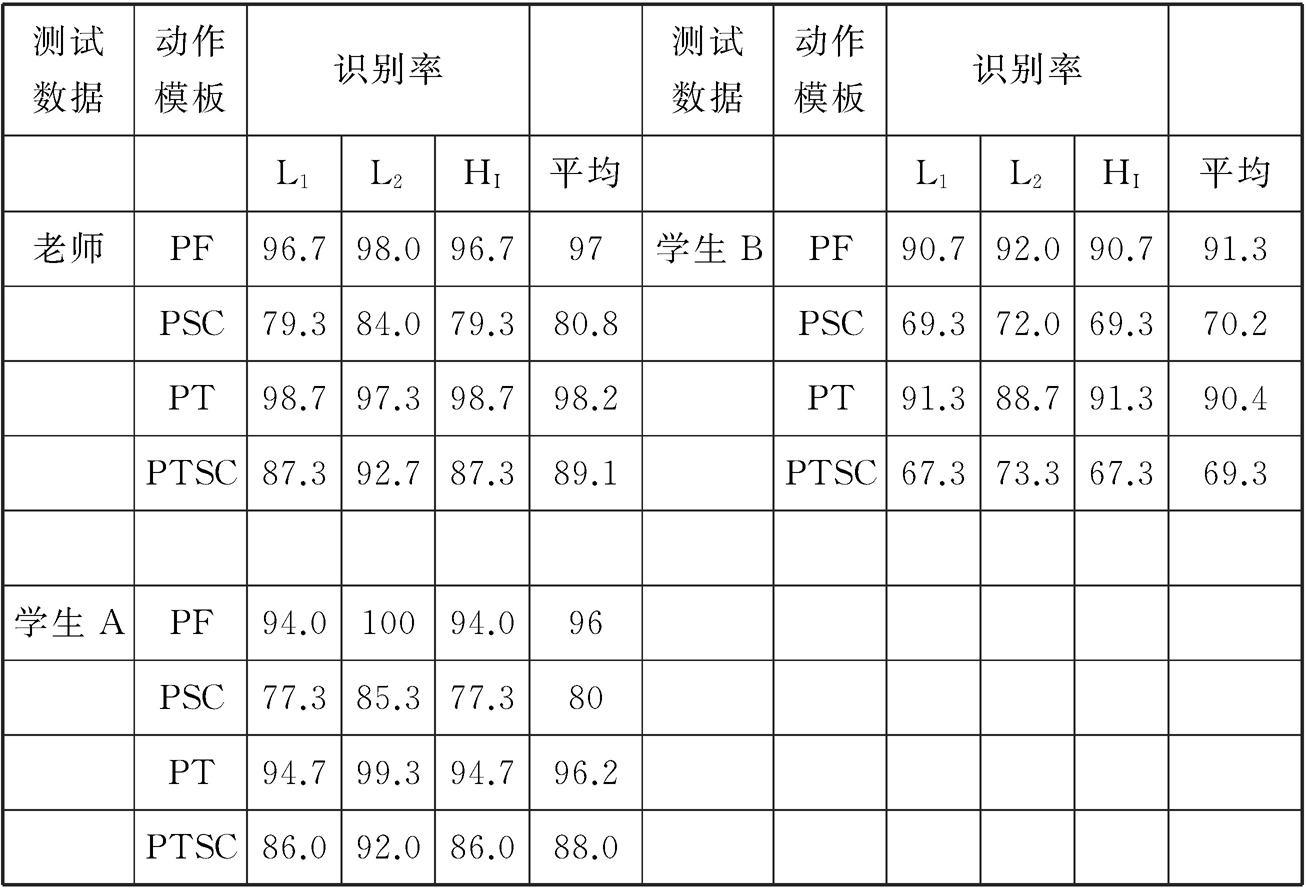
在第四组实验中,我们加入了动作集合2,这样一共有30种动作。由于动作集合2所包含的15种动作都是动作集合1的反转动作,因此基于反转动作所构建的动作模板可能会和动作集合1所对应的动作模板存在一定的相似性,从而导致系统无法正确识别这两类动作。对于这类动作,我们可以从表2-11所示的实验结果中发现,当采用基于姿态转换矩阵(PT)的动作模板时,由于它保留了动作姿态的顺序,因此识别反转动作的优势明显。此外,从结果中我们还可以看出,通过姿态转换矩阵(PT)构建的动作模板的效果比其他的都好,老师动作的平均识别率为96%左右,不过学生动作的平均识别率降到了88%。这可能是因为学生表演的舞蹈序列前后不一致。
表2-11 第四组实验的识别率统计

为了评估系统使用贝叶斯后验概率估计算法识别连续动作的性能,在第五组测试实验中,我们使用了表2-3中的组合舞蹈动作片段D1。对于持续输入的动作片段,因时间不断累积而增长的舞蹈姿态序列被投射到S-SOFM模型上,生成了一个动态序列Su。通过使用舞蹈姿态频率统计法和姿态转换矩阵模式,对老师和学生的舞蹈动作构建动作模板,然后基于这两个模板进行实时动态估算,从而得到一个不断更新的后验概率P(c|Su),依据这个概率可以估算新舞蹈姿态属于动作类别c的概率。
图2-14和图 2-15表示的是对于老师的舞蹈动作,基于不同的动作描述模板所得到的后验概率曲线和在线识别率。从图中我们可以看出,使用这两个动作模板对连续动作进行动作识别,后验概率曲线和在线识别率表现得都很稳健。根据这个结果,系统能够针对动作片段D1以98.6%的准确率识别出老师的舞蹈动作。学生动作的识别结果也令人满意。学生和老师不一样,重复正确动作的能力有限,虽然有些小的数据损失,不过动作识别结果整体上符合实际情况(识别率为84.3%—89%,见图2-16、图2-17)。对于后验概率,在出现混淆的地方,该系统可能会在相对较短的时间内判定该动作为其他类别,然后再回到正确的选择。
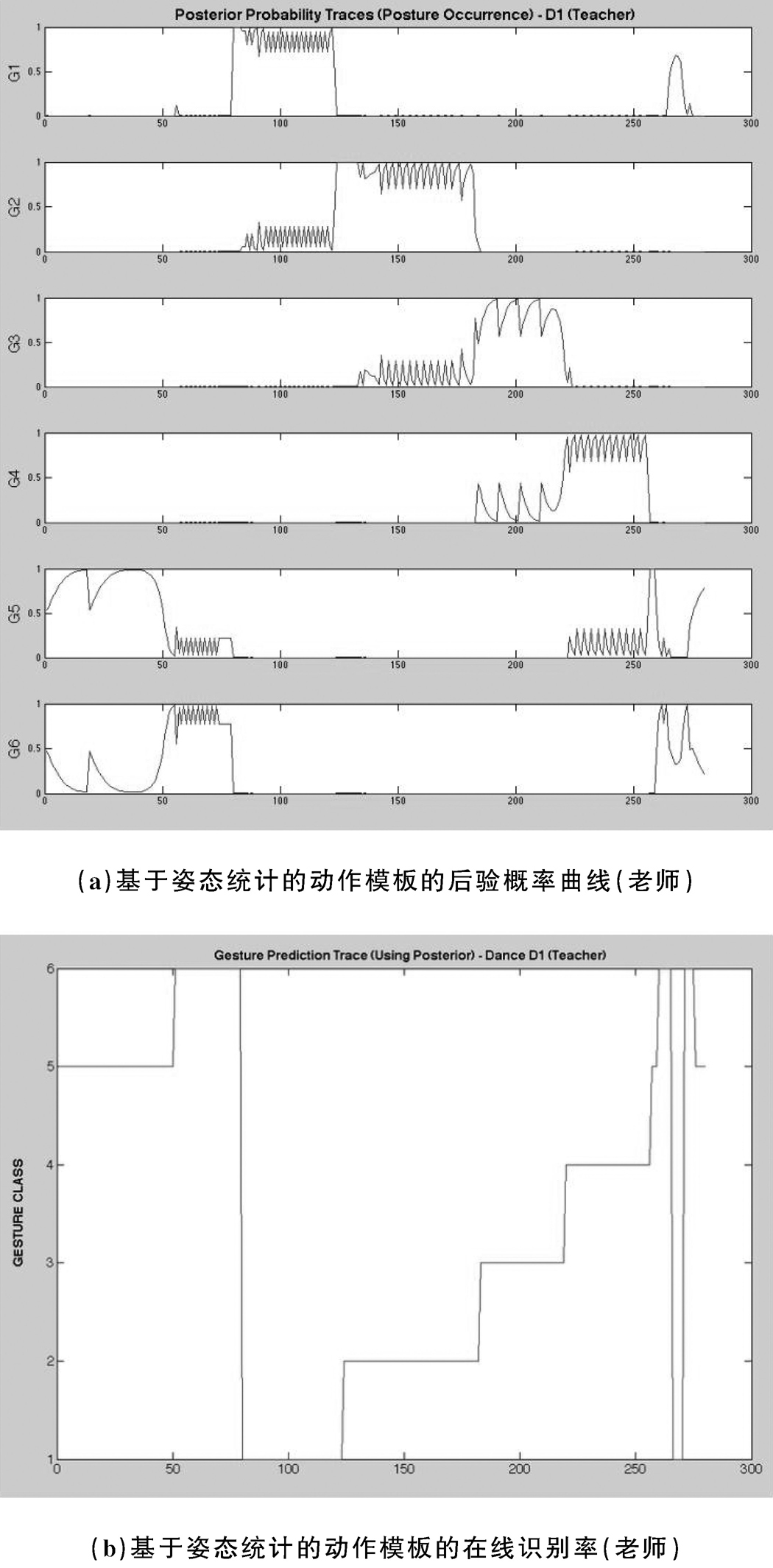
图2-14 基于姿态统计的动作模板的后验概率曲线和在线识别率(老师)

图2-15 基于姿态转换矩阵的动作模板的后验概率曲线和在线识别率(老师)
本章提出了一个新的舞蹈动作识别子系统,它可以较好地对学生的舞蹈动作进行识别。该系统基于前文提出的舞蹈特征提取方法,利用S-SOFM网络训练得到一个球形自组织特征映射模型,以此量化典型舞蹈动作中的姿势空间;然后通过把序列化的舞蹈姿势投射到S-SOFM输出空间中,得到一条平滑的轨迹,这就是一个动作的基本信息模板;最后,通过使用4个不同的动作模板对每类动作进行高层次描述,并且采用3种不同的算法对老师和学生的动作进行相似性评估。
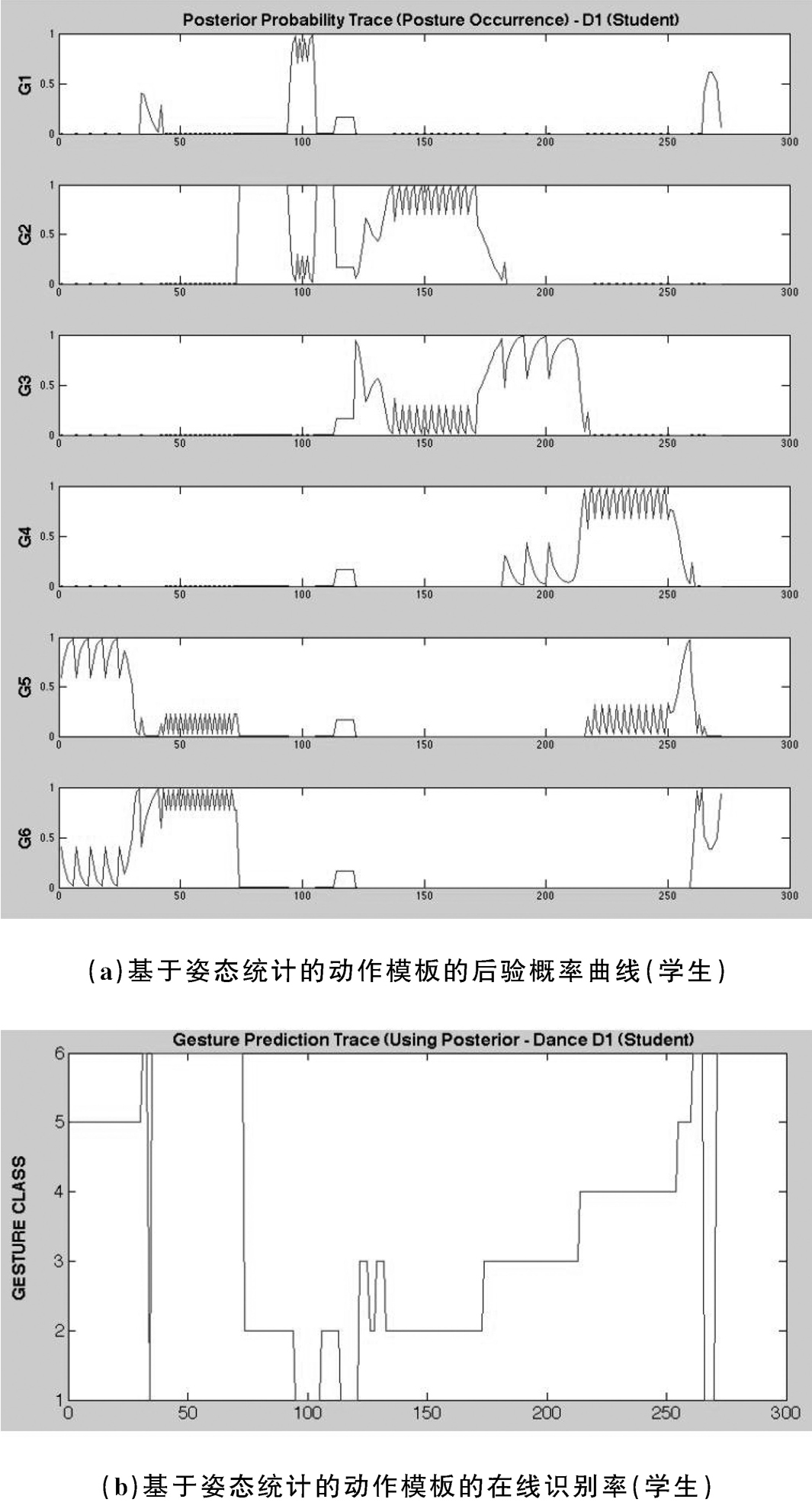
图2-16 基于姿态统计的动作模板的后验概率曲线和在线识别率(学生)
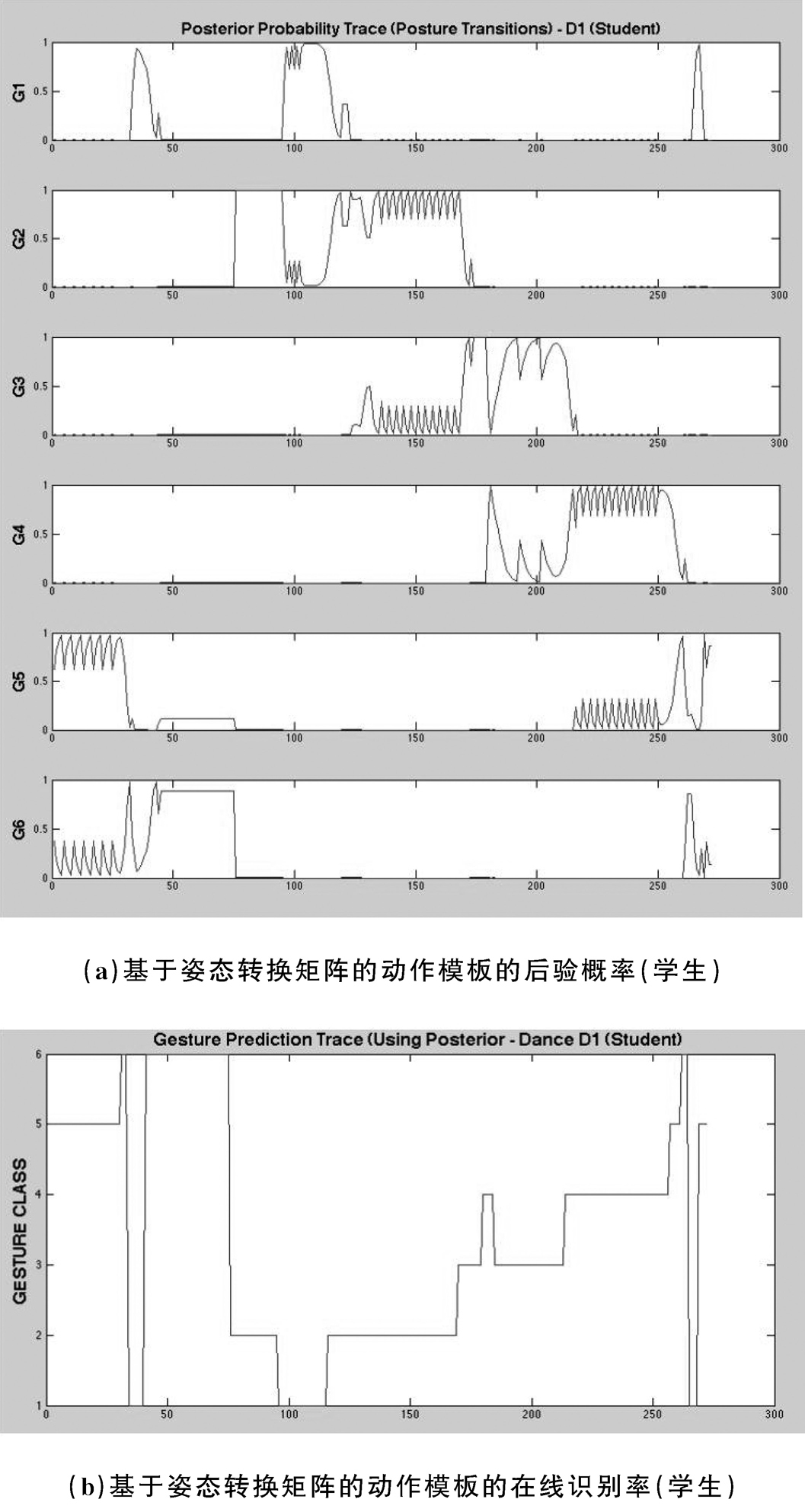
图2-17 基于姿态转换矩阵的动作模板的后验概率和在线识别率(学生)
该系统对于独立动作的识别率在90.5%—99.5%,识别的方法显示出较好的健壮性。考虑到动作的时间顺序,将姿态转换矩阵作为动作模板会使动作的识别率有显著提升。在识别连续动作的实验中,由于使用了贝叶斯后验概率估计算法(将直方图交叉距离作为相似性度量准则)对连续动作进行在线识别,因此系统对老师以及学生的舞蹈动作的识别率都比较理想。
[1] 冯百跃. 舞蹈训练学概论[M]. 上海:上海音乐出版社,2009:3.
闫洁. 舞蹈创作中的“造型性”与“流畅感”[J].时代文学,2009(8):180-181.
刘青戈. 现代舞蹈的身体语言[M].上海:上海音乐出版社,2004.
于平. 舞蹈形态学 [M]. 北京:北京舞蹈学院,1998.
吕艺生. 舞蹈美学[M]. 北京:中央民族出版社,2013.
[2] SALVADOR S,CHAN P.Toward accurate dynamic time warping in linear time and space[J].Intelligent Data Analysis,2007,11(5):561-580.
[3] ZHAO Q,WANG L H,IP H H S,et al. Human 3D motion recognition based on spatial-temporal context of joints[C]. 20th International Conference on Pattern Recognition,2010:2740-2743.
RAPTIS M,KIROVSKI D,HOPPE H. Real-time classification of dance gestures from skeleton animation[C].Proceedings of the 2011 ACM SIGGRAPH/Eurographics Symposium on Computer Animation,2011:147-156.
LV F J,NEVATIA R. Recognition and segmentation of 3D human action using HMM and multi-class adaboost[C].European Conference on Computer Vision,2006:359-372.
[4] 陈松乐,孙正兴,张岩,等. 民族舞蹈运动数据的实例检索方法[J]. 计算机辅助设计与图形学学报,2014,26(2):198-210.
[5] KOHONEN T. The Self-organizing maps[J]. Proceedings of the IEEE,1990,78(9):1464-1480.
[6] WU Y,TAKATSUKA M. Spherical self-organizing map using efficient indexed geodesic data structure[J]. Neural networks,2006,19(6):900-910.
SANGOLE A,KNOPF G K. Visualization of randomly ordered numeric data sets using spherical self-organizing feature maps[J]. Computer & graphics,2003,27(6):963-976.
SANGOLE A P,LEONTITSIS A.Spherical self-organizing feature map:an introductory review[J]. International journal of bifurcation and chaos,2006,16(11):3195-3206.
CHIU C,CHAO S,WU M,et al. Content-base retrieval for human motion data[J].Journal of visual communication and image representation,2004,15(3):446-466
[7] 陈松乐,孙正兴,张岩,等. 民族舞蹈运动数据的实例检索方法[J]. 计算机辅助设计与图形学学报,2014,26(2):198-210.
[8] WU S,XIA S,WANG Z,et al. Efficient motion data indexing and retrieval with local similarity measure of motion strings[J].The visual computer,2009,25(5-7):499-508.
[9] BOUDJEMAI F,ENBERG P B,POSTAIRE J G. Self organizing spherical map architecture for 3D object modeling[C]. Proceedings of workshop on self-organizing maps,2003.
[10] CHIU C,CHAO S,WU M,et al. Content-base retrieval for human motion data[J].Journal of visual communication and image representation,2004,15(3):446-466.
[11] WU Y,TAKATSUKA M. Spherical self-organizing map using efficient indexed geodesic data structure[J]. Neural networks,2006,19(6):900-910.
[12] SANGOLE A,KNOPF G K. Visualization of randomly ordered numeric data sets using spherical self-organizing feature maps[J]. Computer & graphics,2003,27(6):963-976.
SANGOLE A P,LEONTITSIS A.Spherical self-organizing feature map:an introductory review[J]. International journal of bifurcation and chaos,2006,16(11):3195-3206.
[13] BOUDJEMAI F,ENBERG P B,POSTAIRE J G. Self organizing spherical map architecture for 3D object modeling[C].Proceedings of workshop on self-organizing maps,2003.
[14] HIROKAZU N,ALTAF-U-A M D,KUROKAWA K,et al.Spherical SOM and arrangement of neurons using helix on sphere[J].IPSJ digital courier,2006,2:133-137.
[15] SANGOLE A,KNOPF G K. Visualization of randomly ordered numeric data sets using spherical self-organizing feature maps[J]. Computer & graphics,2003,27(6):963-976.
SANGOLE A P,LEONTITSIS A.Spherical self-organizing feature map:an introductory review[J]. International journal of bifurcation and chaos,2006,16(11):3195-3206.
[16] KAWASHIMA M,SHIMADA A M,TANIGUCHI R-I. Early recognition of gesture patterns using sparse code of self-organising map[C].Advances in Self-Organizing Maps,2009:116-123.
YOSHIMURA M,MINE N,KAI T,et al.Quantification of characteristic features of Japanese dance for individuality recognition[C].IEEE International Workshop Robot and Human Interactive Communication,2001:193-199.
[17] KAWASHIMA M,SHIMADA A M,TANIGUCHI R-I. Early recognition of gesture patterns using sparse code of self-organising map[C].Advances in Self-Organizing Maps,2009:116-123.
YOSHIMURA M,MINE N,KAI T,et al.Quantification of characteristic features of Japanese dance for individuality recognition[C].IEEE International Workshop on Robot and Human Interactive Communication,2001:193-199.
有关人工智能舞蹈交互系统原理与设计的文章

然而在舞蹈表演中,舞者经常以各种方式弯曲、倾斜或旋拧他们的躯干,通过这样的动作来表现富有魅力的形体之声。和Yu轴之间的夹角θLE表示左大臂的“倾斜”状态。......
2023-10-29

学生与VR系统的交互有3个步骤。图3-17是计算得到的学生动作的关键帧和老师动作的关键帧的对比图,总体来说,学生存在抢拍的情况,前面部分的节奏相对于老师的来说稍微快点儿,后半部分节奏正常。图3-18是以两个动作的关键帧为时间点,计算得出的学生左臂和右臂的偏离、扩展评估曲线。第二组实验主要是为了分析学生在系统中的学习效果,我们邀请学生A和B学习数据库中的动作并对其进行评价分析。......
2023-10-29
在他们的实验中,专业舞者动作的特征向量和初学者动作的特征向量显示出很大的差异,这证明该方法对日本民族舞蹈动作的分类识别是有效的。图3-1 动作评价系统架构本章从舞蹈教学的需求出发,将拉班动作分析理论与舞蹈教学中常用指导用语的特点结合,提出一个基于拉班运动分析理论的动作评估模型。......
2023-10-29

为了构建一个合理的S-SOFM对舞蹈姿态进行描述,我们需要以大量标准的舞蹈动作作为随机样本对该模型进行训练。在完成S-SOFM学习训练之后,每个节点都会表示一个典型的舞蹈姿态。对一个动作片段的描述就是将一个舞蹈动作离散成一组姿态序列,并将这个姿态序列投射到S-SOFM的输出空间中。每个舞蹈动作片段的直方图都是由该动作所包含的姿态的频率统计值构成的,两个舞蹈动作的相似性可以通过直方图间的相似距离来度量。......
2023-10-29

在动作识别的过程中,舞蹈动作被看作一系列姿态的时间序列。在舞蹈交互系统中,无论是动作的识别还是动作的分析与评估,都需要采用一种有效的方式对动作进行清晰的定义和可量化的描述。在后续的舞蹈交互系统中,针对动作识别和动作评估这两个研究领域,笔者将使用不同的特征子集来进行有针对性的研究。......
2023-10-29
所以在舞蹈评价方法中,我们要从姿态、节奏和力效三个方面进行分析,并在最后输出舞蹈学习者可以理解的指导语句。}gsr}0137-1.jpg}/gsr}其中,fk、fk分别表示关节运动状态的最大、最小值,这两个数值将参考人体生物力学以及舞蹈解剖学中对人体关节的定义和关节活动范围来设定。表3-2中的各关节特征值的极值范围,在实际测算过程中以舞蹈交互系统的空间坐标为准进行设定。......
2023-10-29

基于上一章提出的舞蹈姿态的时空特征提取方法,针对形成的新的舞蹈动作特征集合,本章将利用S-SOFM构建一个有效的输出模型,对舞蹈动作进行聚类和分析,从而实现舞蹈动作的识别。图2-6 离散的姿态序列本书采用S-SOFM来构建输出模型。此外,由于保留了SOFM的特点,因此数据样本在重复训练分类之后生成的S-SOFM的各神经元节点之间的拓扑映射关系与原始输入样本一样。......
2023-10-29

目前的研究仅限于基础舞蹈动作,以LMA理论为基础,以舞蹈的姿态、节奏和力效等方面作为评价标准对动作进行分析。未来我们将进一步研究LMA理论中的力效,探讨力效与舞蹈艺术、舞者心理的关系,进一步丰富评价系统,构建更加高级的舞蹈交互系统,对舞蹈的艺术性进行多方面阐释。未来,针对动作识别方法,我们将就动作模板和关键帧的权重因子等方面进行深入研究,以提高舞蹈动作的识别率。......
2023-10-29
相关推荐