为了构建一个合理的S-SOFM对舞蹈姿态进行描述,我们需要以大量标准的舞蹈动作作为随机样本对该模型进行训练。在完成S-SOFM学习训练之后,每个节点都会表示一个典型的舞蹈姿态。对一个动作片段的描述就是将一个舞蹈动作离散成一组姿态序列,并将这个姿态序列投射到S-SOFM的输出空间中。每个舞蹈动作片段的直方图都是由该动作所包含的姿态的频率统计值构成的,两个舞蹈动作的相似性可以通过直方图间的相似距离来度量。......
2023-10-29
基于上一章提出的舞蹈姿态的时空特征提取方法,针对形成的新的舞蹈动作特征集合,本章将利用S-SOFM构建一个有效的输出模型,对舞蹈动作进行聚类和分析,从而实现舞蹈动作的识别。如图2-5所示,舞蹈动作识别模块可以分为以下五个部分:初始化、构建姿势空间、生成动作模板、识别舞蹈动作和可视化标准动作。
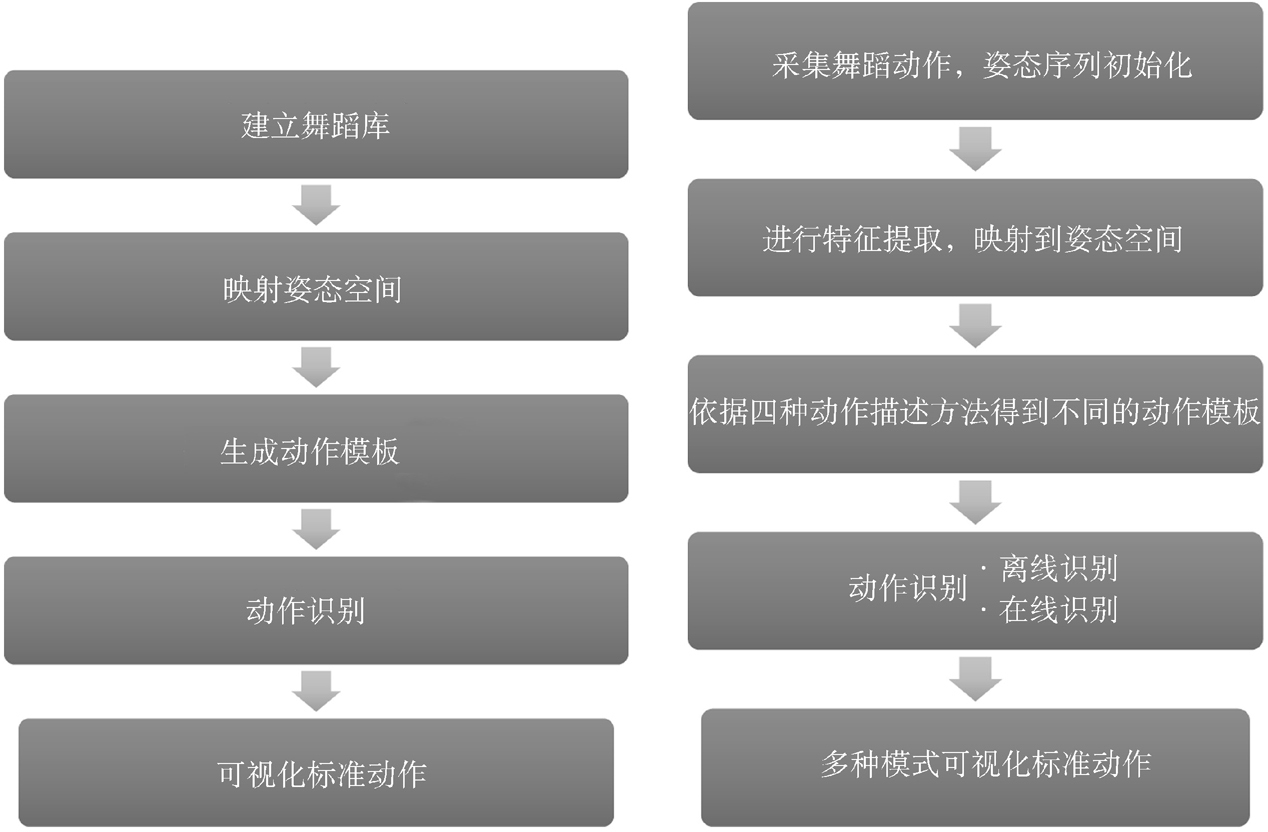
图2-5 舞蹈识别模块的构成
在前期的舞蹈动作初始化过程中,系统将会依据第一章所提出的舞蹈姿态时空特征描述模型逐一对舞蹈动作库中的各个动作进行特征提取,从而形成一个舞蹈动作特征库。针对舞蹈动作的时序性和舞蹈姿态之间的逻辑性等特点,如图2-6所示,舞蹈动作序列会被解析成一系列离散的姿态时序集合;以此为基础,针对不同舞蹈的特点设定特征映射方法,建立舞蹈动作和舞蹈分类模板之间的关系映射。

图2-6 离散的姿态序列(www.chuimin.cn)
本书采用S-SOFM来构建输出模型。由于S-SOFM的输出节点会形成一个封闭球体[15],且每个输出节点都具有同等的竞争机会,都可以生成自己的邻近区域,因此,人体运动的姿势序列能够以最大限度的分离状态被分配到S-SOFM的输出节点上,且每个动作模板都会形成一个独特的“轨迹”。此外,由于保留了SOFM的特点,因此数据样本在重复训练分类之后生成的S-SOFM的各神经元节点之间的拓扑映射关系与原始输入样本一样。舞蹈动作的有序性,揭示了舞蹈的姿态在生成的模型上所存在的相互关系,也就是说,在S-SOFM输出模型中,物理位置相近的节点对应的舞蹈姿态必然具有一定的相似性。这种保留了原始数据的拓扑映射关系的训练方法使得一个动作片段(单序列姿态集合,如图2-7所示)在S-SOFM中形成的轨迹是有序的、平滑的,而我们正是根据这样的轨迹对每个动作片段进行描述。

图2-7 球体模型上的轨迹显示一个动作是由五个简单“姿态”构成的
在对动作进行分类训练时,由于不同舞蹈演员在表演相同舞蹈动作的时候存在节奏和动作姿态上的差异,数据中也会包含一定的噪声,因此我们需要对大量包含同样动作的动作片段在S-SOFM输出模型上进行重复训练学习,从而得到一个描述合理的输出模型。由于S-SOFM具有自组织概率特性,在输入大量动作样本且输出神经元节点数量足够的情况下,经过训练生成的球面模型的空间密度分布会近似于输入随机样本的概率密度分布,因此,在基于S-SOFM的训练过程中,无须提前设定各样本概率分布的先验知识。多次映射训练之后,输入的舞蹈动作样本在输出空间会被分为相应的类别,我们也称之为一个动作模板,它表现为一条平滑的轨迹,所对应的是一个有代表性的舞蹈动作。
在动作识别阶段,我们实际上是在选择一个合适的匹配过程。在匹配过程中,我们通过测算待识别的舞蹈动作与所有的动作模板的相似程度,来判断该动作所属的类别。如果输入动作在动作轨迹上和某一个动作模板达到一定的相似度(满足了判定的条件),它们即被看作一类动作。这个识别过程既可以在线下实现,也能以实时处理的方式来实现,这一点将在实验部分讨论。本书的研究目的在于把一个连续的舞蹈动作细分成一系列相关联的舞蹈动作基本单元,然后对学习者的动作进行量化评估分析,从而形成比较有用的动作反馈意见。
有关人工智能舞蹈交互系统原理与设计的文章

为了构建一个合理的S-SOFM对舞蹈姿态进行描述,我们需要以大量标准的舞蹈动作作为随机样本对该模型进行训练。在完成S-SOFM学习训练之后,每个节点都会表示一个典型的舞蹈姿态。对一个动作片段的描述就是将一个舞蹈动作离散成一组姿态序列,并将这个姿态序列投射到S-SOFM的输出空间中。每个舞蹈动作片段的直方图都是由该动作所包含的姿态的频率统计值构成的,两个舞蹈动作的相似性可以通过直方图间的相似距离来度量。......
2023-10-29

然而在舞蹈表演中,舞者经常以各种方式弯曲、倾斜或旋拧他们的躯干,通过这样的动作来表现富有魅力的形体之声。和Yu轴之间的夹角θLE表示左大臂的“倾斜”状态。......
2023-10-29

所以在舞蹈评价方法中,我们要从姿态、节奏和力效三个方面进行分析,并在最后输出舞蹈学习者可以理解的指导语句。}gsr}0137-1.jpg}/gsr}其中,fk、fk分别表示关节运动状态的最大、最小值,这两个数值将参考人体生物力学以及舞蹈解剖学中对人体关节的定义和关节活动范围来设定。表3-2中的各关节特征值的极值范围,在实际测算过程中以舞蹈交互系统的空间坐标为准进行设定。......
2023-10-29

在他们的实验中,专业舞者动作的特征向量和初学者动作的特征向量显示出很大的差异,这证明该方法对日本民族舞蹈动作的分类识别是有效的。图3-1 动作评价系统架构本章从舞蹈教学的需求出发,将拉班动作分析理论与舞蹈教学中常用指导用语的特点结合,提出一个基于拉班运动分析理论的动作评估模型。......
2023-10-29

学生与VR系统的交互有3个步骤。图3-17是计算得到的学生动作的关键帧和老师动作的关键帧的对比图,总体来说,学生存在抢拍的情况,前面部分的节奏相对于老师的来说稍微快点儿,后半部分节奏正常。图3-18是以两个动作的关键帧为时间点,计算得出的学生左臂和右臂的偏离、扩展评估曲线。第二组实验主要是为了分析学生在系统中的学习效果,我们邀请学生A和B学习数据库中的动作并对其进行评价分析。......
2023-10-29

在动作识别的过程中,舞蹈动作被看作一系列姿态的时间序列。在舞蹈交互系统中,无论是动作的识别还是动作的分析与评估,都需要采用一种有效的方式对动作进行清晰的定义和可量化的描述。在后续的舞蹈交互系统中,针对动作识别和动作评估这两个研究领域,笔者将使用不同的特征子集来进行有针对性的研究。......
2023-10-29

轨迹上的实心标记分别代表动作的起点和动作的终点。L1距离的定义如下:L2距离的定义如下:L3距离的定义如下:第二个实验方案的执行过程完全一样,只不过训练生成动作单元模板的动作集在动作库中的比例变为40%,而剩下的60%用来测试识别能力。基于不同的动作模板的实验结果见表2-4至表2-7。表2-10 第三组实验的识别率统计在第四组实验中,我们加入了动作集合2,这样一共有30种动作。......
2023-10-29

所以在个性化学习需求强烈的今天,如何利用人工智能技术构建一个没有老师监督的、通过智能化方法帮助学生在舞蹈学习过程中自我修正、自我提升的舞蹈交互系统,既是挑战,也是一项非常有意义的研究工作。在动作识别的研究中,舞蹈的节奏性特征通常会被视为弱化因子,研究重点在于姿态序列的识别。不过,在动作的评估研究中,正确分析、评估舞蹈的节奏是非常重要的内容。......
2023-10-29
相关推荐