【摘要】:本小节在前面梁单元和简支模型的基础上,修改简支条件为弹性轴承支承,重新计算分析转子的临界转速。程序规定11和22为垂直于旋转轴方向,33为沿着旋转轴方向。图14-35 轴承单元标志Algorithm:临界转速的计算方法设置为Direct(直接法)。图14-36 第1阶正向涡动临界转速振型图用鼠标拖动滑块到频率阶数为4,第2阶正向涡动频率显示的临界转速振型图如图14-37所示。图14-37 第2阶正向涡动临界转速振型图
本小节在前面梁单元和简支模型的基础上,修改简支条件为弹性轴承支承,重新计算分析转子的临界转速。
1.添加轴承单元
(1)单击Analysis Data模块图标,进入分析数据模块。
(2)如图14 31所示,在数据树Used Data中选中简支Locking约束的5个记录,单击鼠标右键,在弹出的快捷菜单中选择Ignore命令,记录的颜色变暗。
注意:此操作是将先前定义的约束条件忽略,即使其在分析中不起作用,因此可以使用Don't ignore命令重新启用关闭的操作。此操作对其他很多定义都可以使用,用户使用起来非常方便。此操作是否生效可以通过记录颜色的变化来区分,Ignore命令使记录的颜色变暗。
(3)隐藏数据树Mesh Model中的单元。
(4)显示数据树Model中的几何。
(5)选择并单击Constraint图标。
(6)如图14 32所示,在Constraint下拉列表框中选择接地轴承单元Ground Bearing。

图14-31 忽略约束
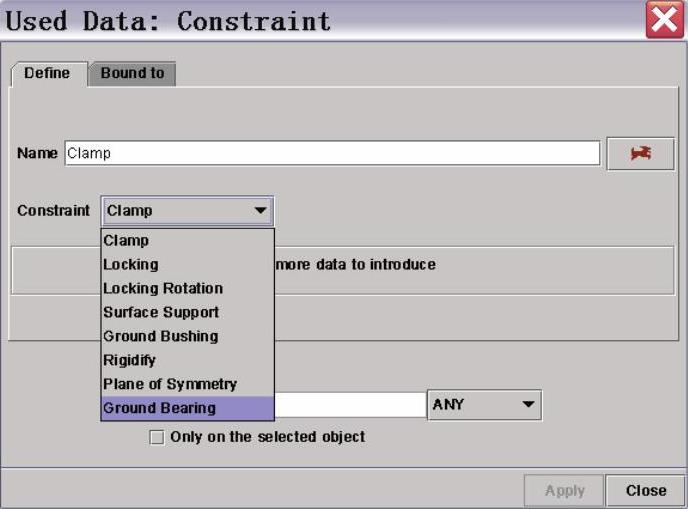
图14-32 选择接地轴承单元
(7)单击Stiffness Matrix右侧的 按钮。
按钮。
(8)在弹出的对话框中输入轴承的刚度系数:11方向为5000N/mm,22方向也为5000N/mm。轴承单元参数设置如图14-33所示。
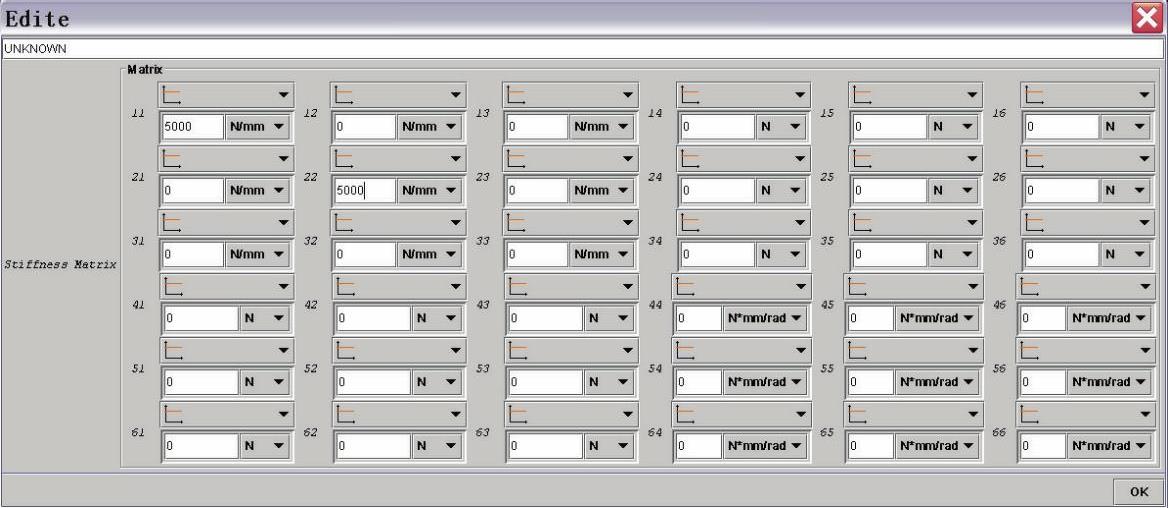
图14-33 轴承单元参数设置
注意:轴承刚度矩阵为6×6矩阵,其中1、2和3为位移刚度,4、5和6为转角刚度。11、22和33为对角线主位移刚度。程序规定11和22为垂直于旋转轴方向,33为沿着旋转轴方向。
(9)单击OK按钮,退出对话框。
(10)图14-34所示为轴承单元设置对话框,勾选Rotor复选框,选择轴承支承的转子名称Rotor_on_Wire1。
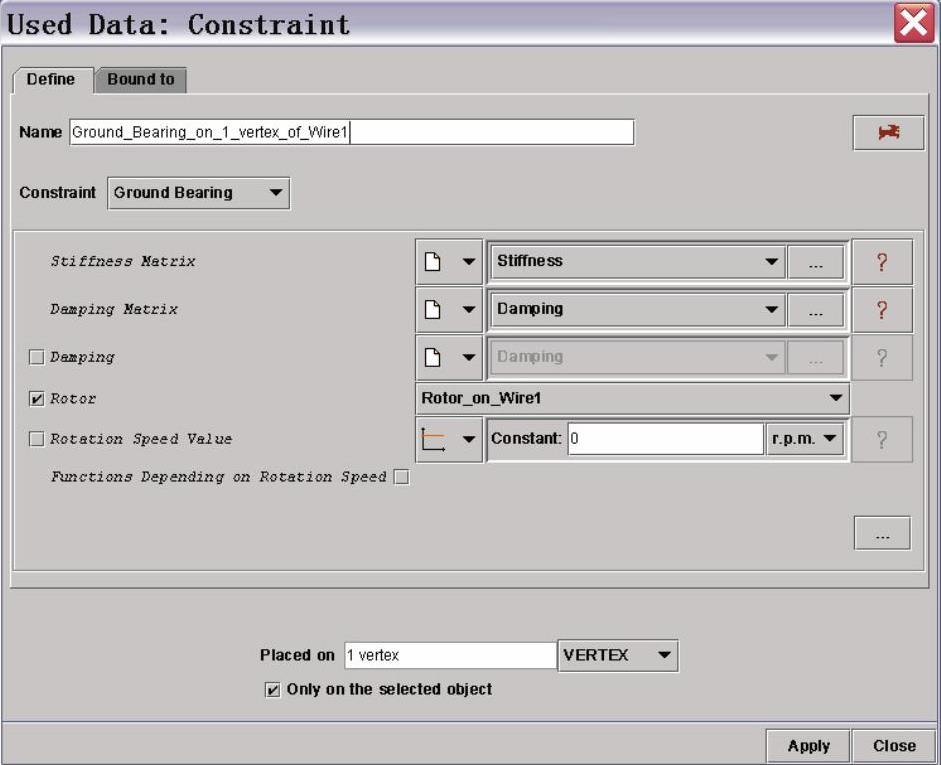
图14-34 轴承单元设置
注意:由于此例中只有一个转子,勾选Rotor复选框后,转子Rotor_on_Wire1自动被选中。如果有多个转子,在此就需要选择转子定义的名称。
(11)在屏幕上选择左侧轴承位置的点(Vertex)。
(12)单击Apply按钮,创建一个轴承单元,屏幕上出现了一个轴承单元标志(如图14-35所示)。
(13)在屏幕上选择右侧轴承位置的点(Vertex)。
(14)单击Apply按钮,创建另外一个轴承单元,屏幕上出现了另一个轴承单元标志(如图14-35所示)。(www.chuimin.cn)
(15)单击Close按钮退出。
(16)浏览数据树中的Used Data项,出现两个轴承单元的记录。
2.求解
(1)单击Convert and Launch图标。
(2)设置工作目录,浏览并选择目录D:\Samwork。
(3)设置求解需要的内存为100(单位为MB)。
(4)单击Eigen Values Sweeping选项卡。
Sweeping选项卡。
(5)Number of Eigen Values:输入特征值10。
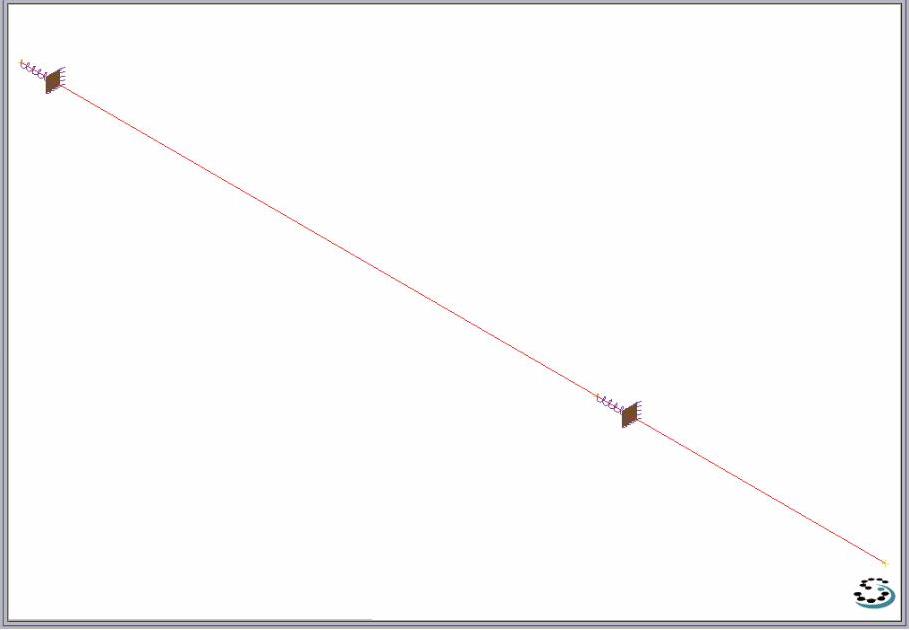
图14-35 轴承单元标志
(6)Algorithm:临界转速的计算方法设置为Direct(直接法)。
(7)单击 图标,提交作业,并显示执行状态的监视对话框。
图标,提交作业,并显示执行状态的监视对话框。
(8)当计算完成后,单击Close按钮,关闭监视对话框。再次单击Close按钮,关闭Solver Launch对话框。
(9)单击工具条中的保存文件快捷图标进行保存。
3.查看结果
(1)单击Result模块图标,进入结果显示模块。
(2)在数据树中选择Nodal Displacements。
(3)单击鼠标右键,在弹出的快捷菜单中选择Reference(S)命令,弹出Reference(S)对话框。
(4)用鼠标拖动滑块到频率阶数为2,第1阶正向涡动频率显示的临界转速振型图如图14-36所示。
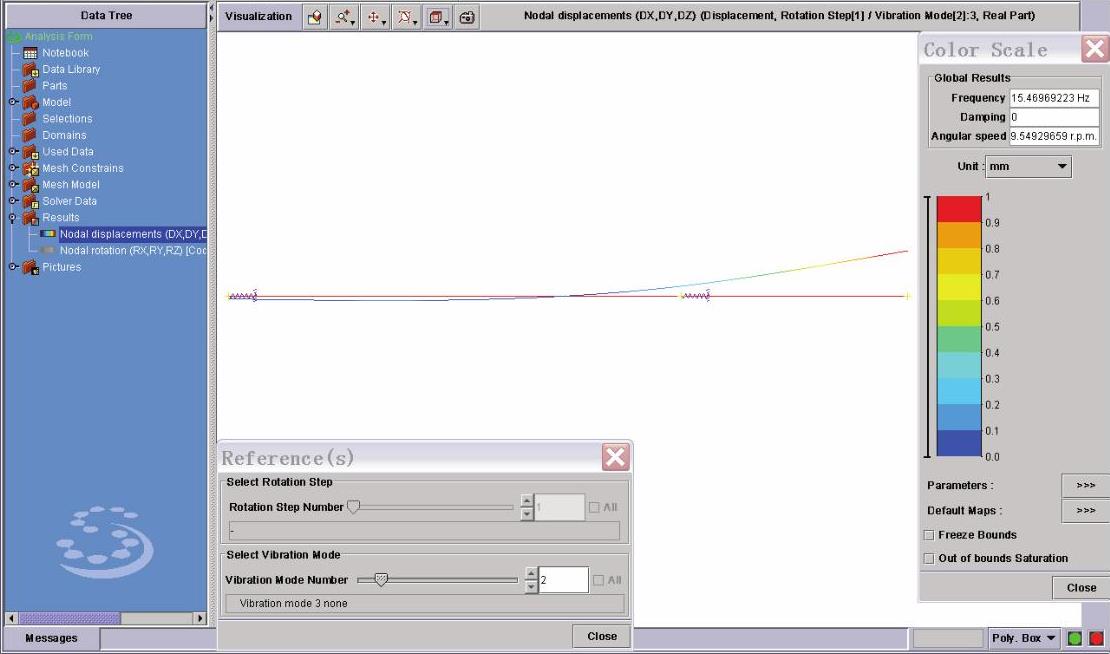
图14-36 第1阶正向涡动临界转速振型图
(5)用鼠标拖动滑块到频率阶数为4,第2阶正向涡动频率显示的临界转速振型图如图14-37所示。
(6)单击工具条中的保存文件快捷图标进行保存。
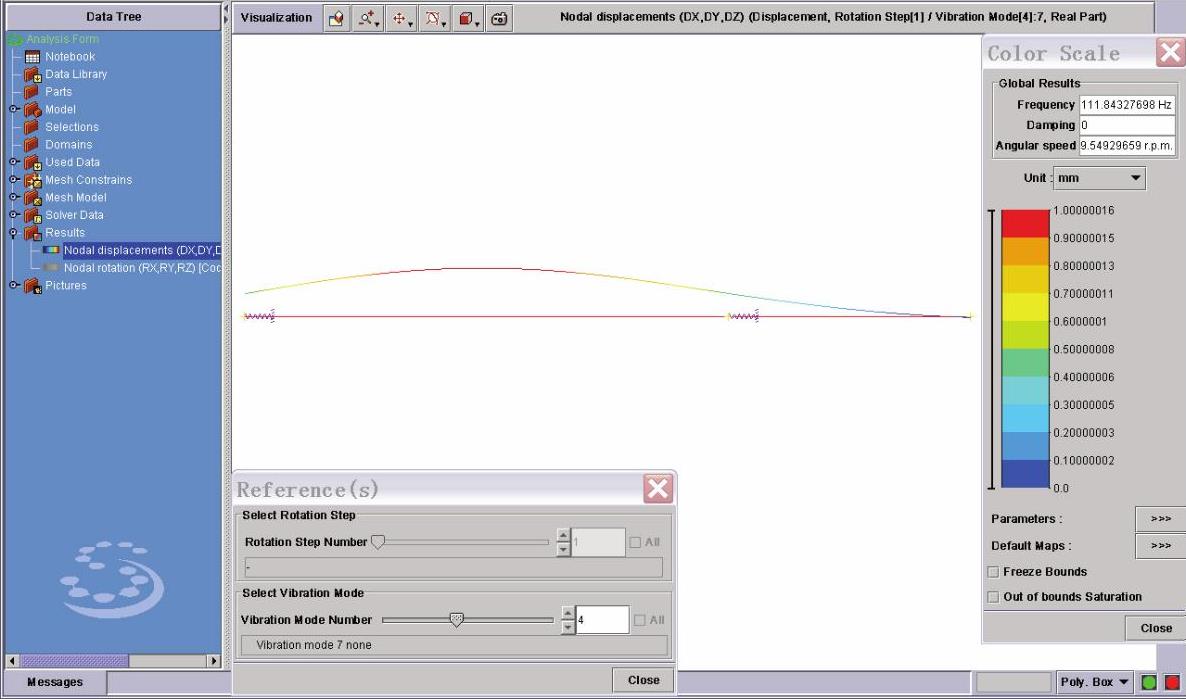
图14-37 第2阶正向涡动临界转速振型图






相关推荐