松连接是由平键或半圆键与轴和轮毂组成。导向平键和滑键用于传动零件在工作时需要做轴向移动的场合 。也叫导向平键,长度较长 。当轴上传动件要求滑移的距离较大时,因所需导向平键的长度过大,制造困难,故宜采用滑键。图3-5导向平键和滑键2.半圆键连接 键呈半圆形,可在轴上相应的半圆形键槽中摆动,以适应在装配时轮毂中键槽的斜度 。缺点是轴上键槽较深,对轴的强度削弱较大,故一般只适用于轻载连接的场合。......
2025-09-29
连接转子和固定部件或者连接不同旋转部件的结构都是连接部件,比如滚动轴承、滑动轴承、挤压油膜阻尼器、密封、齿轮等。
带控制器的主动磁轴承和均分负载轴承也是连接部件。
1.线性模型
连接部件建模的简单方法是使用广义刚度和阻尼矩阵,这种方法对线性连接部件是有效的,系数会随着旋转速度、时间和频率变化。
假设阻尼是粘性的,相应的作用力可以表示成如下方程:
f=(K+K(p))q+(B+B(p))q
或者,当阻尼是滞后的,相互作用力采用以下的复杂形式表述:
f(ω)=(K+K(p))q(ω)+j(B+B(p))q(ω)
在时域里,p是时间或轴承的旋转速度,在频域中,p是频率或轴承的旋转速度。这种模型一般满足初步设计,并且用来描述滚动轴承、滑动轴承或者密封。当系数随着旋转速度改变时,它们在平衡点附近也符合切线刚度和阻尼系数。
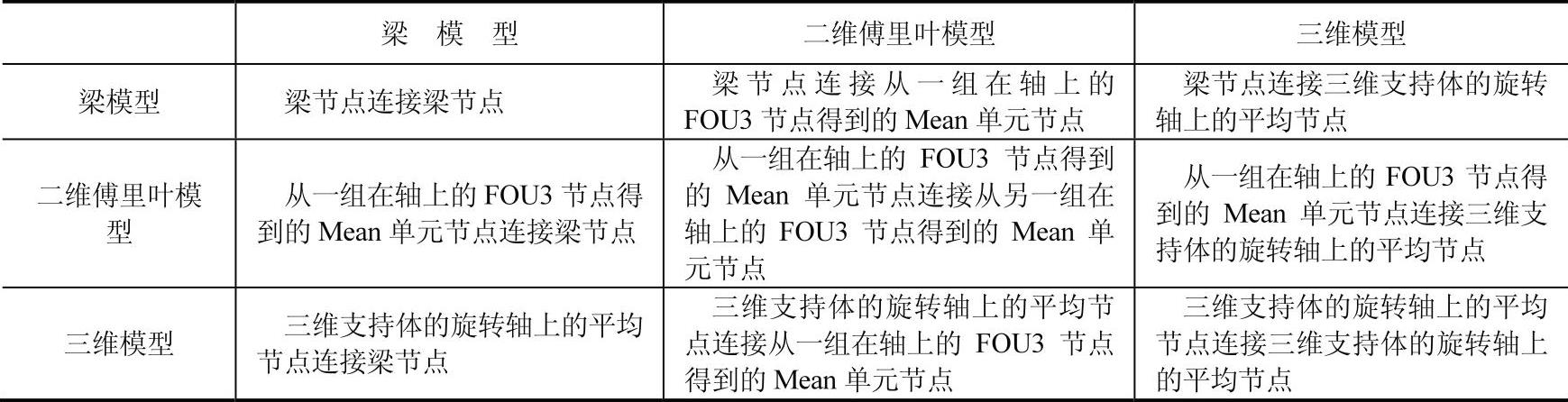
为了使这种连接模型与转子和静子的有限元模型耦合,我们要做一个理想化的装配。一方面,用Mean单元把从属节点同一组节点连接起来,从属节点的位移和转角是这组节点的平均位移和平均转角。另一方面,二维傅里叶单元在模型中使用时,用FOU3连接单元连接柱坐标描述的二维模型和三维模型。表13-1总结了理想化连接。
表13-1二维模型和三维模型的理想化连接。
在Mean单元中定义的约束如下。平动:

转动-选项1:

转动-选项2:
2.非线性模型(https://www.chuimin.cn)
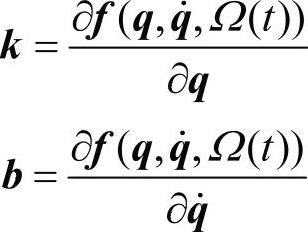
当线性假设不再可用时,相互作用力也要描述成非线性:
这个方程可以使用在非线性轴承包括间隙和摩擦力的情况。切线刚度和阻尼矩阵或者用在迭代过程以获得力的响应,或者作为相对于平衡位置的结果以便在临界转速计算中使用。
包含非线性连接理想化的装配同线性案例中是相似的,挤压油膜阻尼器轴承包含在连接设备中。
3.深入的模型
当模型中采用了滑动轴承或者挤压油膜阻尼器,需要使用更加精细的描述,这时转子和静子节点的位移和速度通过这些轴承来耦合,以获得轴承或者挤压油膜阻尼器的间隙分布。
这种间隙分布在例如雷诺方程的液体薄膜模型中用来作为输入,求解这个方程可以获得压力分布。然后计算动力学作用力和判断是否需要切线刚度或者阻尼矩阵。
4.主动磁轴承
主动磁轴承可以作为输入输出系统,这时,输入是传感器度量;输出是激励动作,如同磁轴承;核心是控制器。
5.传感器
在有限元模型中,传感器是一种专门的单元(如SE3D),用来测量两点之间给定方向相对位移、速度或者加速度。传感器的位置附属于支撑结构上相应传感器位置的一点,第二点是移动点(如在转子上)。这种方法可以考虑由于支撑结构的柔性而产生的测量扰动。
6.控制器
在时域中,可以通过外部控制器,例如MATLAB/Simulink输入,或者通过使用预先确定的控制箱来模拟控制器。也可以用一个控制器的输出作为另一个控制器的输入,选择是比较多的。
在频域中,当通常的取样时间比感兴趣的最高阶模态周期要低得多时,控制器被假设成连续的。
预先确定的控制器也可以使用如同PID或者线性传递函数。也可以输入外部控制器如同线性状态矢量空间系统(见图13-8)。
这种方法可以通过求解经典的特征值问题来检查系统稳定性。
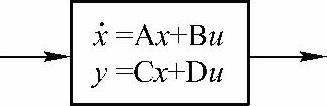
图13-8 线性状态矢量空间系统
相关文章

松连接是由平键或半圆键与轴和轮毂组成。导向平键和滑键用于传动零件在工作时需要做轴向移动的场合 。也叫导向平键,长度较长 。当轴上传动件要求滑移的距离较大时,因所需导向平键的长度过大,制造困难,故宜采用滑键。图3-5导向平键和滑键2.半圆键连接 键呈半圆形,可在轴上相应的半圆形键槽中摆动,以适应在装配时轮毂中键槽的斜度 。缺点是轴上键槽较深,对轴的强度削弱较大,故一般只适用于轻载连接的场合。......
2025-09-29

图3.2导向平键连接图3.3滑键连接平键的标记方法为:键“头部类型”“键宽b”ד键长L”“国标号”。图3.4半圆键连接图3.5半圆键连接示例半圆键的公称尺寸为键的宽度、高度和半径,根据轴的直径确定。图3.6楔键工作面楔键连接在传递有冲击、振动和较大转矩时,仍能保证连接的可靠性,并具有单向轴向定位功能。......
2025-09-29

下面以图11-33所示的互连接线图为例,该互连接线图采用单线表示。图11-33 互连接线图绘制范例本范例具体的绘制步骤如下。图11-37 在现有框内创建其他单行文字图11-37 在现有框内创建其他单行文字在“绘制”面板中单击“绘图”按钮,绘制图11-38所示的连接线。图11-44 将单线条表示的部分加粗图11-44 将单线条表示的部分加粗保存文件,保存的文件名为“互连接线图.dwg”。......
2025-09-29

联轴器与离合器用来连接轴与轴,以传递转动和扭矩;有时也可用作安全装置。十字轴式万向联轴器结构紧凑,维护方便,故被广泛应用于汽车、多头钻床等机器的传动。中小型的十字轴式万向联轴器已标准化,设计时可按标准选用。常用的离合器按操纵方式分为机械式、气动式、液压式、电磁式、超越式、离心式、安全离合器。图2-39几种常见的离合器实物图图2-39几种常见的离合器实物图......
2025-09-29

螺纹连接是利用螺纹零件构成的可拆连接,应用十分广泛。表5-15螺纹连接的基本类型及应用续表续表常用螺纹连接件在机械制造中常见的螺纹连接件有螺栓、双头螺柱、螺钉、紧定螺钉、螺母和垫圈等。表5-16常用螺纹连接件的类型、结构特点及应用续表根据国家标准规定,螺纹连接件分为三个精度等级,其代号为A、B、C 级。③双头螺柱的轴心线必须与被连接件的表面垂直。......
2025-09-29

大沽桥吊杆与拱肋采用销接连接,接头处拱肋内部设置竖向加劲,下焊吊耳,通过销与吊杆上锚头衔接,构造复杂。图2-19吊杆连接构造示意图疲劳试验如图2 -22 所示。吊杆连接构造疲劳试验于2004 年12 月在中国船舶工业金属结构试验检测中心强度疲劳检测站进行。......
2025-09-29

扩散连接参数主要有温度、压力、时间、气氛环境和试件的表面状态,这些因素之间相互影响、相互制约,在选择焊接参数时应统筹考虑。此外,扩散连接时还应考虑中间层材料的选用。对瞬时液相扩散连接温度的选择,常在可生成液相的最低温度附近,温度过高将引起母材的过量溶解。......
2025-09-29
并联电路又可以分为电阻器的并联、电容器的并联、电感器的并联等几种。图3-5 电阻器的并联电路由图可见,假定将并联电路接到电源上,由于并联电路各并联电阻器两端的电压相同,因而根据欧姆定律有I1=U/R1,I2=U/R2,…......
2025-09-29
相关推荐