SAMCEF Machine Tools是机床工具结构分析专业集成软件包。目前,机床领域存在的主要问题如下。解决这些非线性分析问题需要隐式无条件稳定时间积分方法。SAMCEF机床软件包以机构分析和结构分析耦合的数学力学背景为基础。如图2-18所示为SAMCEF Machine Tools创建的典型机床模型。......
2025-09-30
特殊的单元如下。
●驱动马达。
●控制器。
●函数。
●转子(只用于转子动力学分析)。
函数和控制器可以在数据库里或者直接在一个分析数据里定义。
1.驱动马达
共有3种类型的驱动马达。
●给定旋转的驱动马达,如图5-20所示。
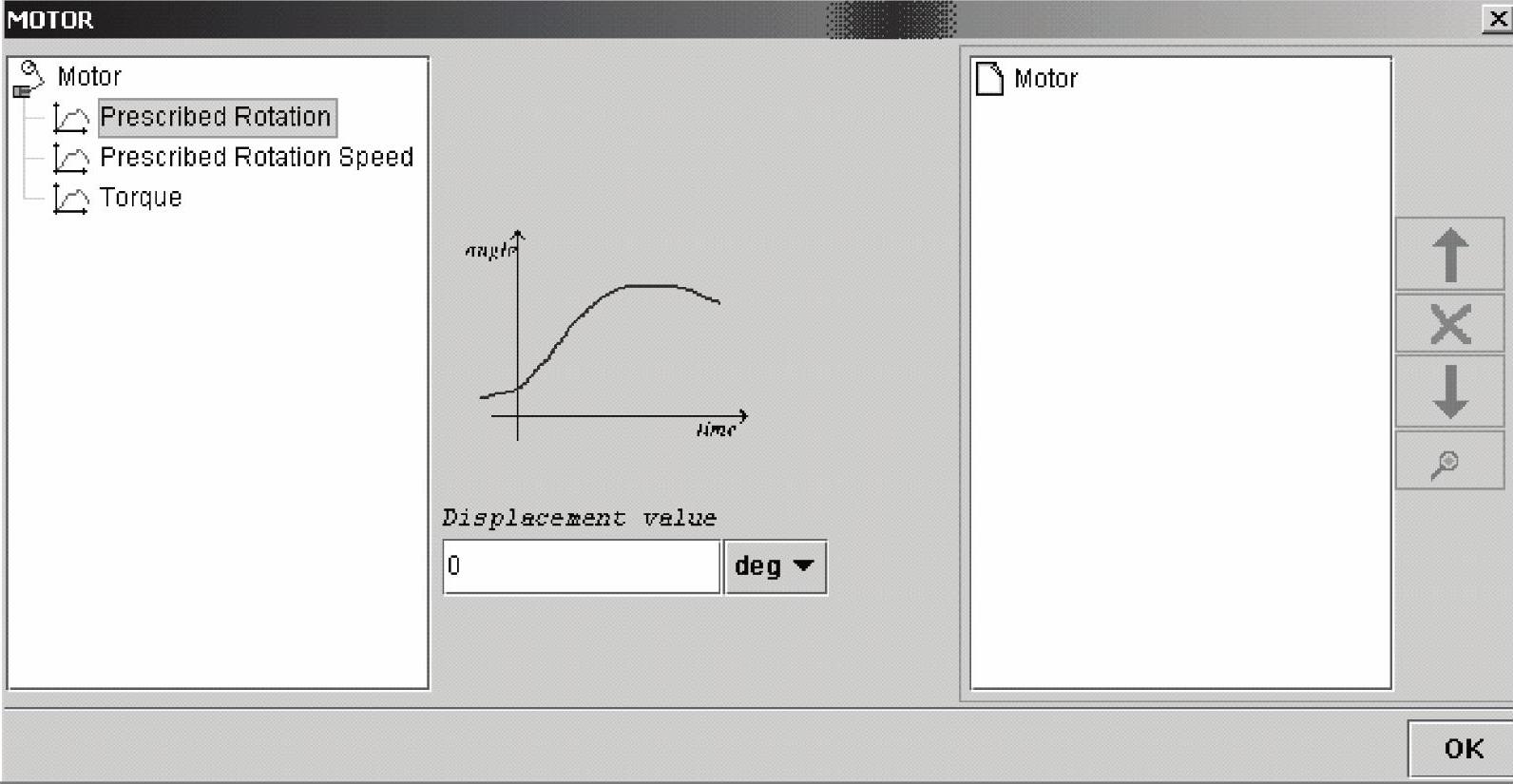
图5-20 给定旋转的驱动马达
●给定旋转速度的驱动马达,如图5-21所示。
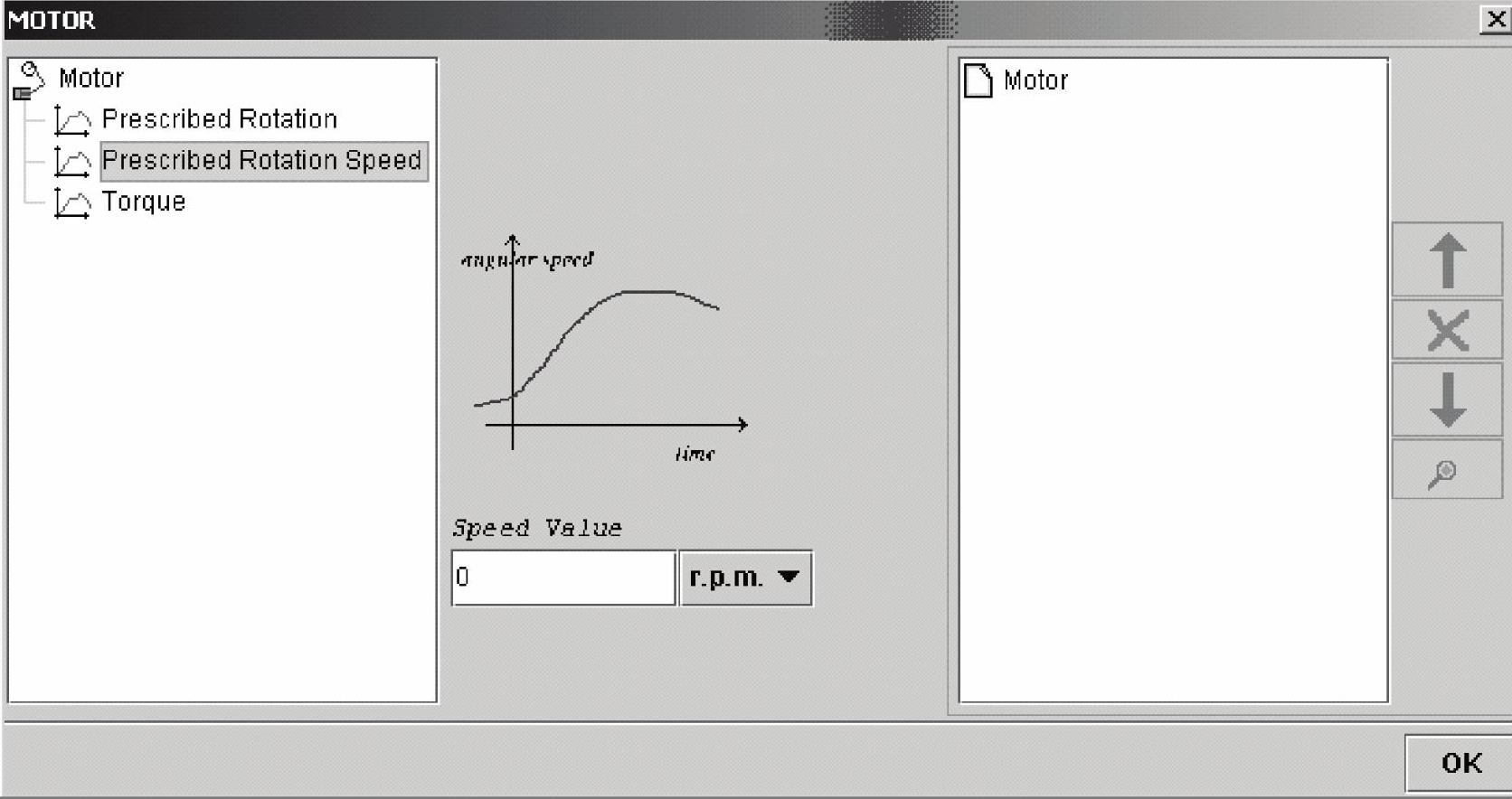
图5-21 给定旋转速度的驱动马达
●给定扭矩的驱动马达,如图5-22所示。
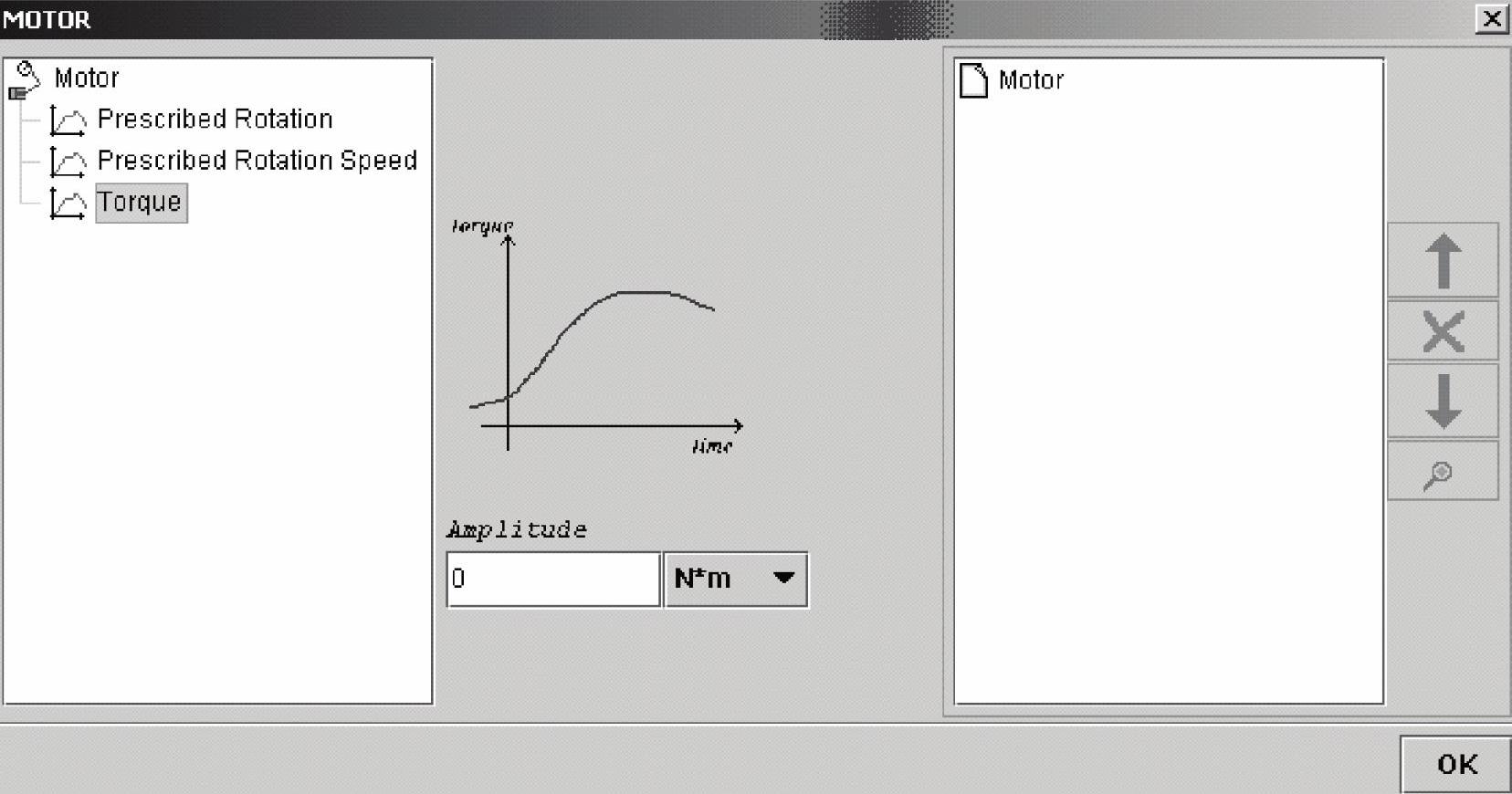
图5-22 给定扭矩的驱动马达
例如给一个装配/铰接增加一个驱动马达,步骤如下。
(1)激活分析数据模块。
(2)在数据树中激活当前选择的模型。
(3)单击鼠标右键,在弹出的快捷菜单中选择Assembly命令,或直接通过模块中的图标选择Assembly,弹出装配定义对话框,如图5-23所示。
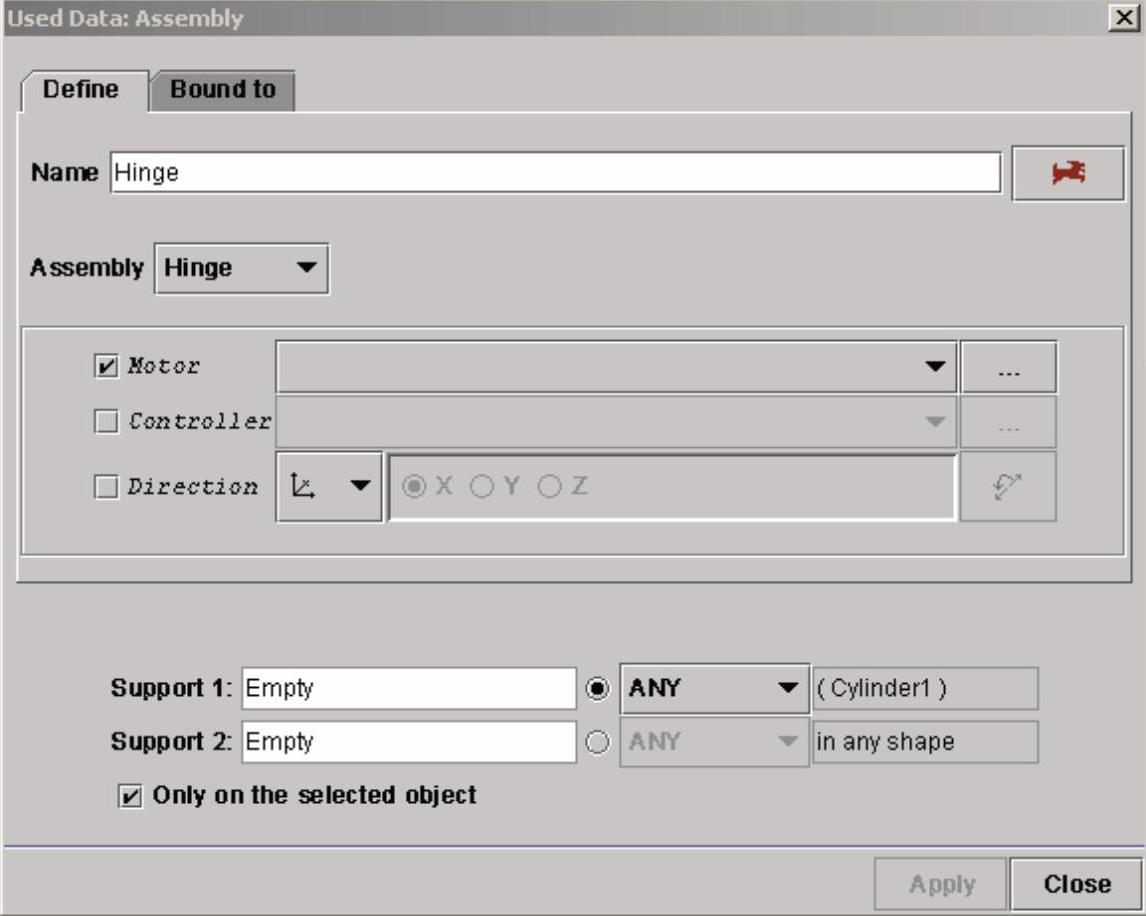
图5-23 装配定义对话框
(4)在Assembly类型中选择Hinge。
(5)选择Motor复选框,激活一个驱动马达。
(6)单击 按钮定义一个驱动马达。
按钮定义一个驱动马达。
(7)选择驱动马达类型(给定旋转、给定旋转速度、给定扭矩)。
(8)选择函数类型(线性函数、阶梯函数、点接点函数)并定义。
(9)单击Apply按钮增加该驱动马达(重复步骤5~8可以增加多个)。
2.控制器
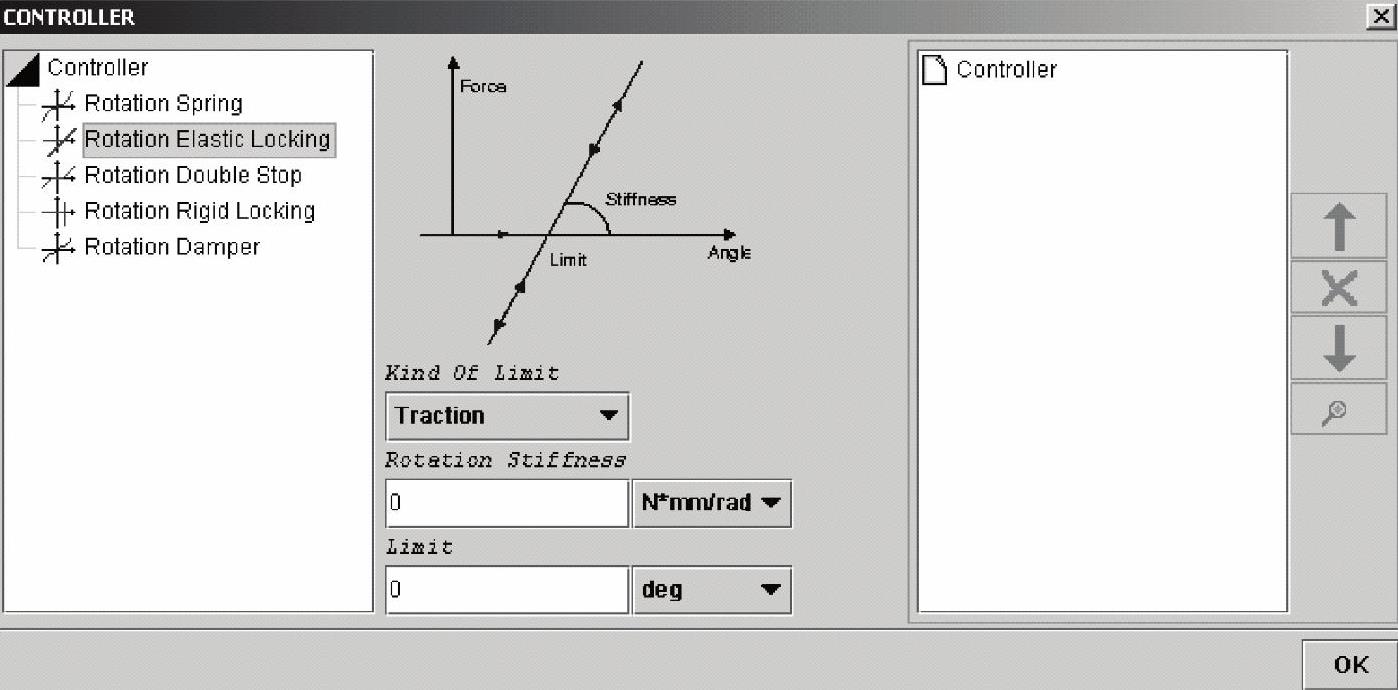
在本版本里,数据库定义的控制器只是外部控制器,用于装配/线性驱动马达。控制器的主要类型有转动弹簧、转动弹性制动、转动联锁、转动刚性制动和转动阻尼,如图5-24~图5-28所示。
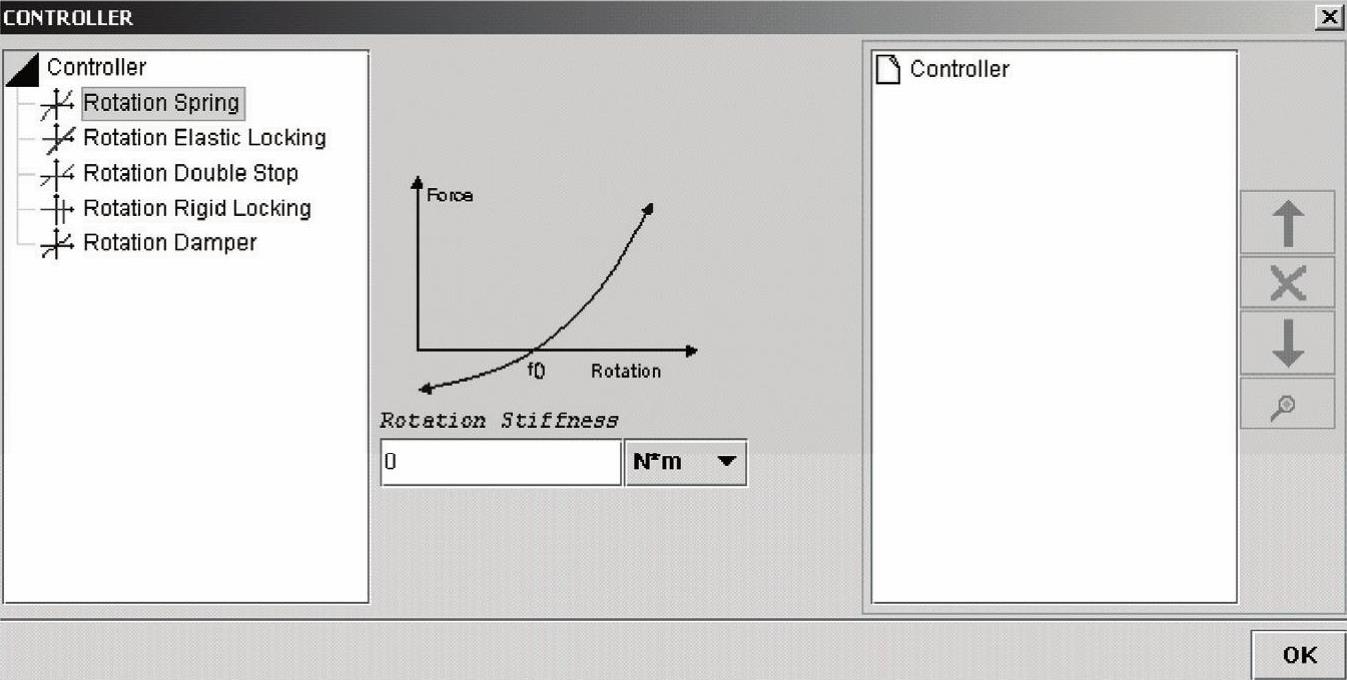
图5-24 转动弹簧
 (https://www.chuimin.cn)
(https://www.chuimin.cn)
图5-25 转动弹性制动
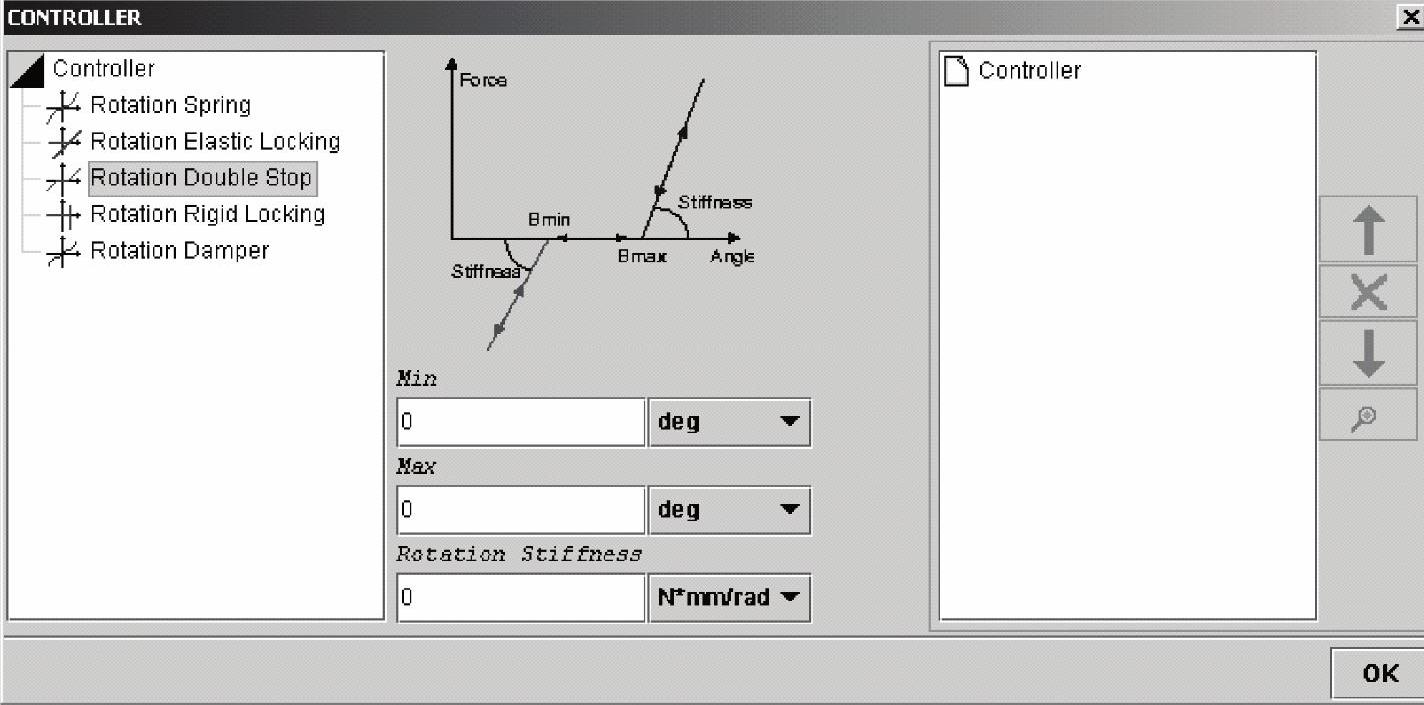
图5-26 转动联锁
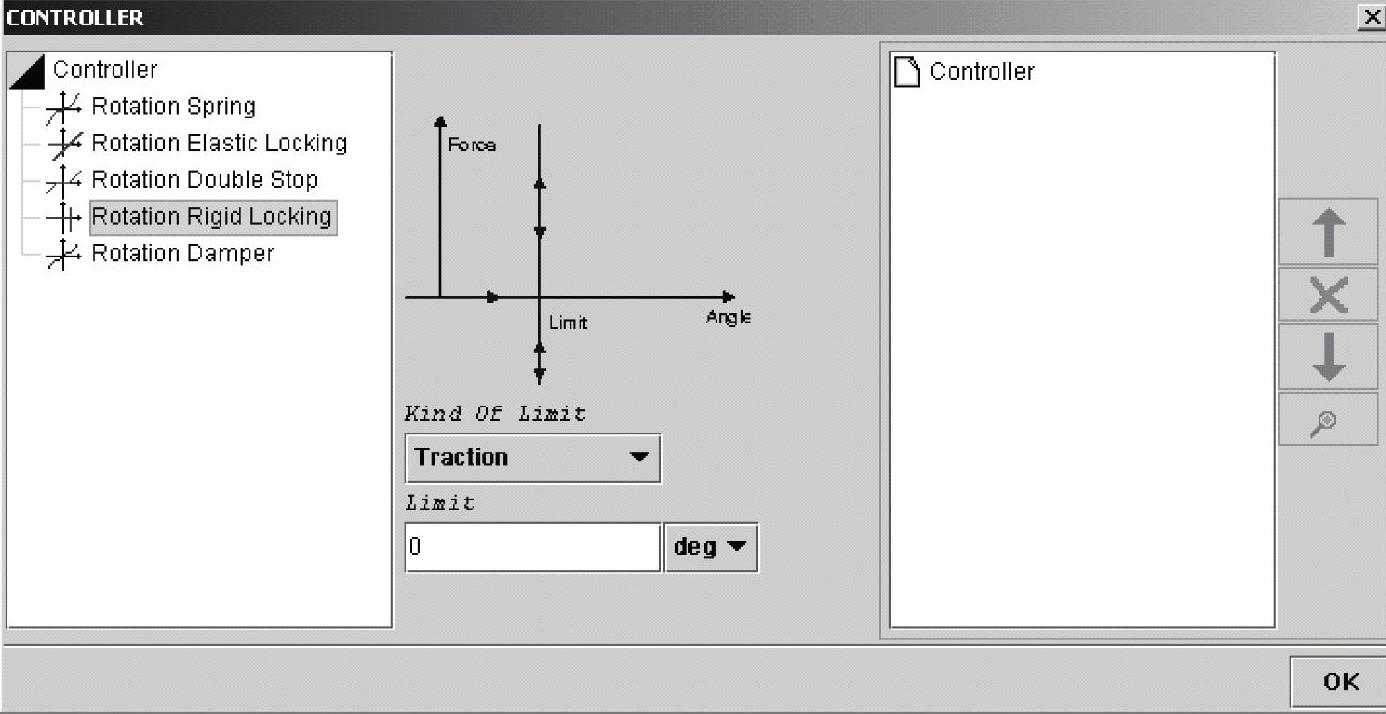
图5-27 转动刚性制动
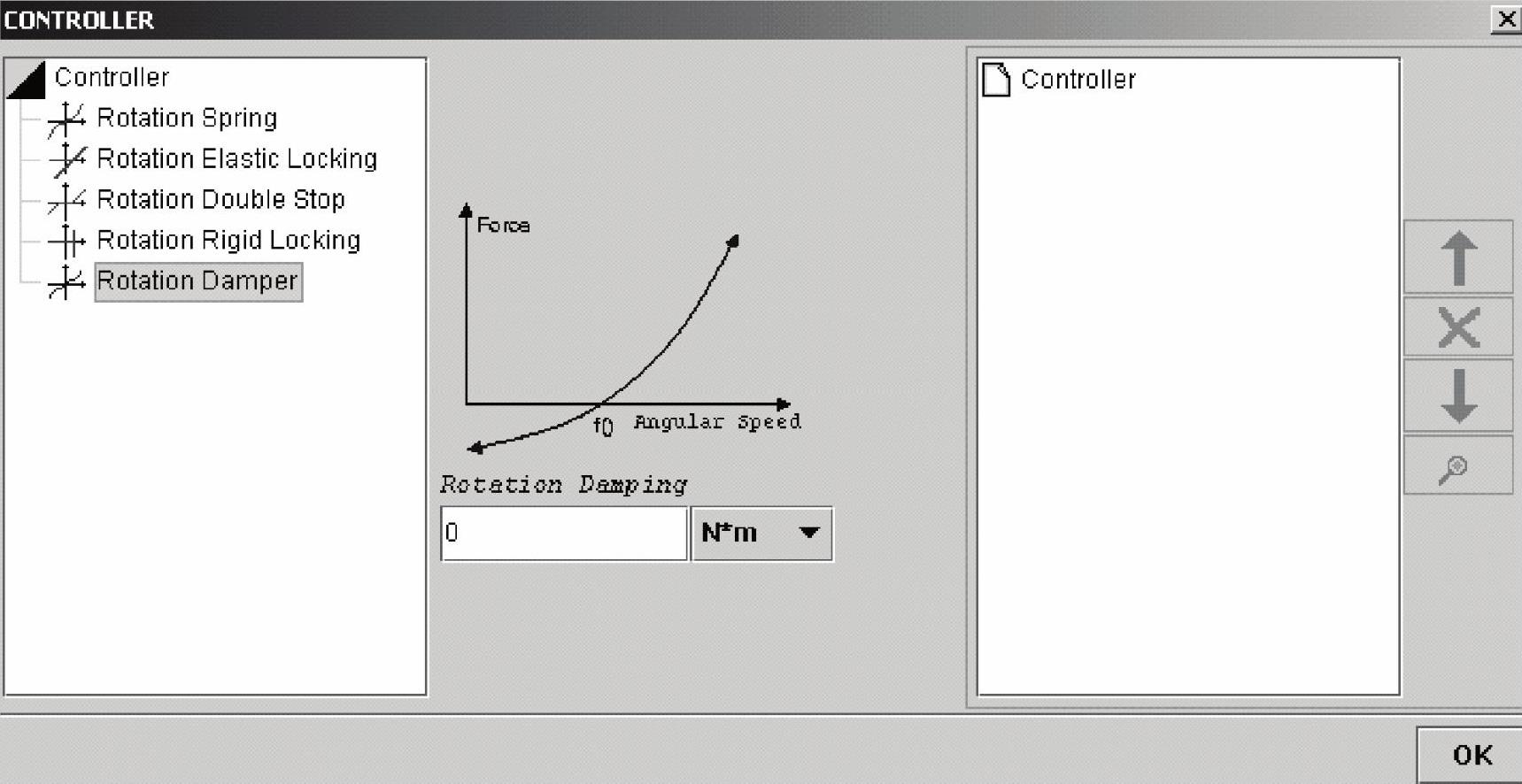
图5-28 转动阻尼
3.函数
函数编辑对话框如图5-29所示。建立一个函数,应该注意以下几个方面。
●横坐标和纵坐标的使用单位。
●函数类型。
●数据单位类型。
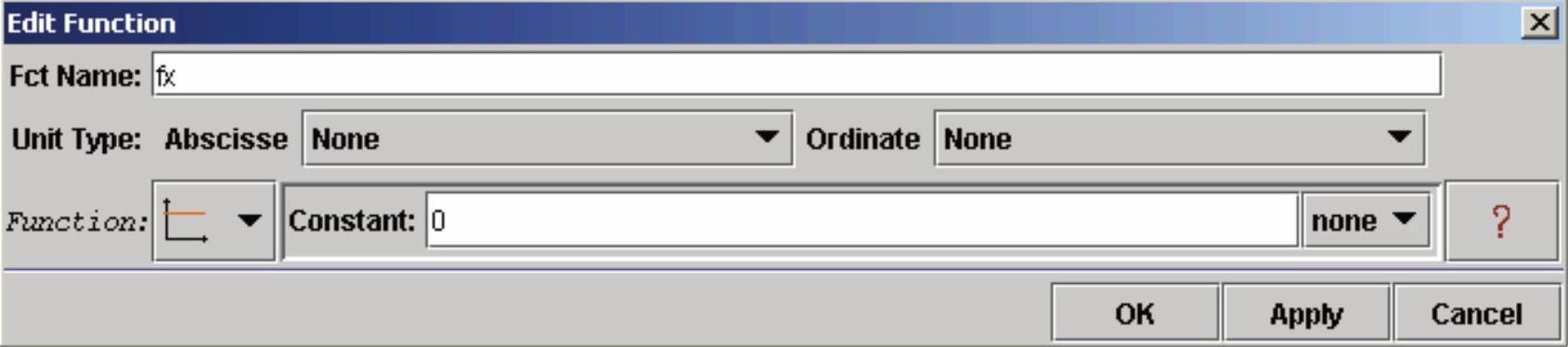
图5-29 函数编辑对话框
函数类型如下。
●常函数。
●线性函数(如图5-30所示):Y=f(u)。
●阶梯函数(如图5-31所示):当0<u<x时,Y=f(u);其余情况下,Y=常数。
●点对点函数(如图5-32所示):这种类型的函数可以定义特殊函数,可以使用一些以前的函数定义,也可以使用增加点、插入点直接定义函数。
●关联函数 :该图标可以将一个数据库里定义的函数和一个FEA应用数据关联起来。
:该图标可以将一个数据库里定义的函数和一个FEA应用数据关联起来。
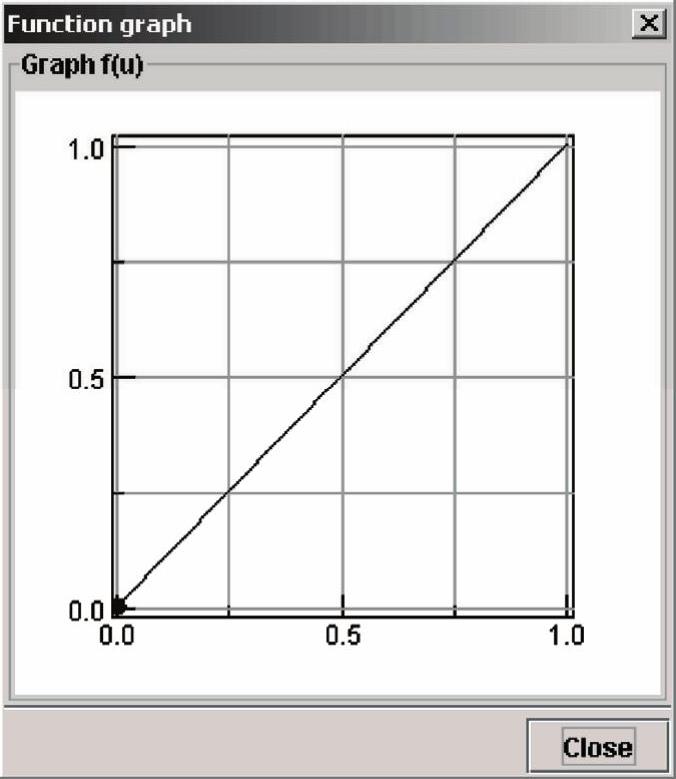
图5-30 线性函数
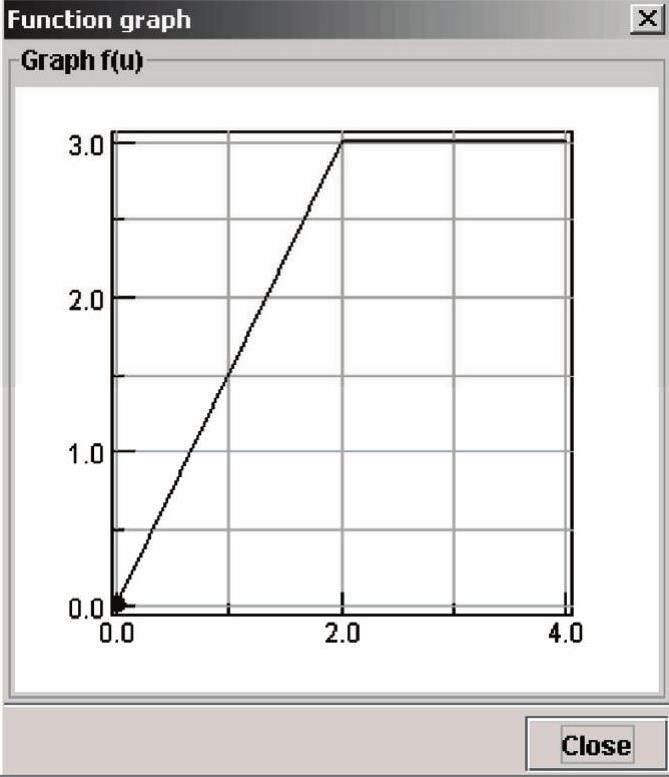
图5-31 阶梯函数
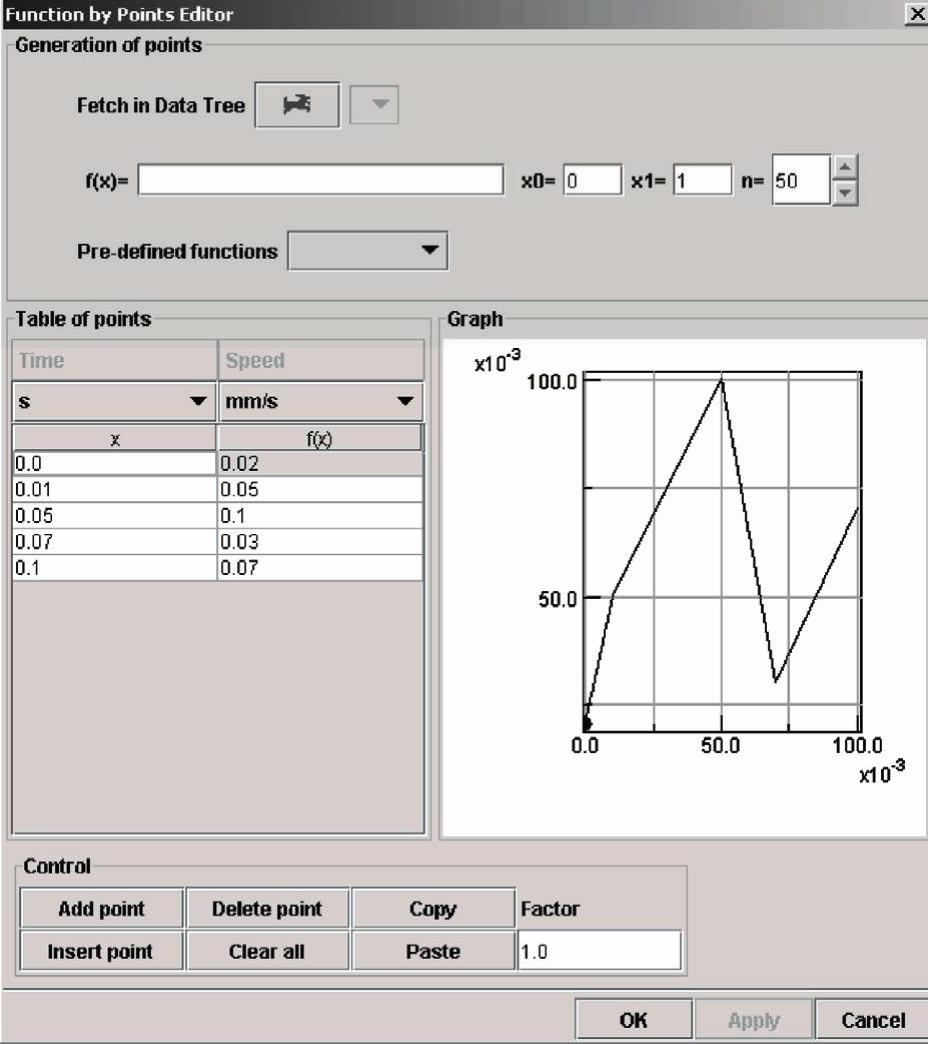
图5-32 点对点函数
单击图5-29中的 按钮,显示函数图象。
按钮,显示函数图象。
4.转子
转子特征只用于转子设置,如图5-33所示。一个转子可以用梁模型、多次谐波模型(二维)或三维实体模型表示。旋转轴对一维梁单元是无效的,但对于一个二维或三维模型是必须定义的。对于多谐波模型,旋转轴必须是建立在结构上(X轴、Y轴或Z轴)。
阻尼选项只对谐波响应和瞬态响应有效。瞬态响应是必须设定旋转速度的。
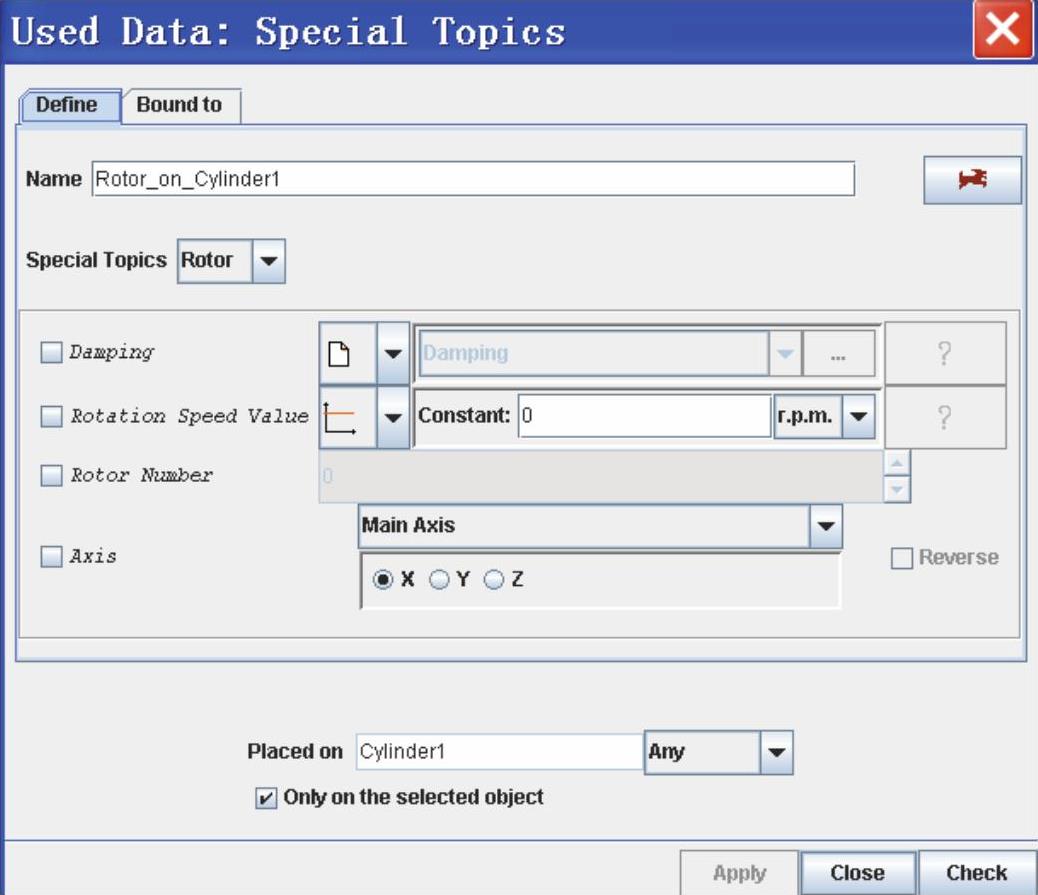
图5-33 转子设置
相关文章

SAMCEF Machine Tools是机床工具结构分析专业集成软件包。目前,机床领域存在的主要问题如下。解决这些非线性分析问题需要隐式无条件稳定时间积分方法。SAMCEF机床软件包以机构分析和结构分析耦合的数学力学背景为基础。如图2-18所示为SAMCEF Machine Tools创建的典型机床模型。......
2025-09-30

图4-41 布尔运算对话框1.布尔运算布尔运算可以选择的运算方式为剪切、合并、求交和限定,其操作对话框如图4-41所示,具体说明见表4-4。图4-42 倒圆角3.倒直线角如图4-43中的对话框所示,倒直线角操作也是只能对壳或实体进行。图4-43 倒直线角4.印痕如图4-44中的对话框所示,创建印痕是在表面上印上线的痕迹。......
2025-09-30

一个应用FEA数据简单地说就是将一个FEA数据指定给一个FEA数据载体。现在,一个新的FEA应用数据已创建,在数据树上已可以可用。在数据树中根据它的名字选择FEA应用数据。图5-4 编辑应用数据支持体3.删除一个应用分析数据删除一个或更多FEA应用数据的步骤如下。单击OK按钮确认FEA应用数据删除,或单击Cancel按钮取消操作。图5-6 忽略的数据显示为灰色6.显示一个应用分析数据在隐式非线性分析中,可以显示一些装配的运动效果,步骤如下。......
2025-09-30

SAMCEF软件对计算机硬件的要求不高,可以运行在Windows系统上。本节以SAMCEFField V8.4为例介绍软件的安装过程。SAMCEF求解器也包含在其安装光盘中。SAMCEF Field V8.4安装的主要操作步骤如下。如图3-2所示,选择安装路径,默认安装路径为“C:\LMS_Samtech\SAMCEFField\V8.4-01_x64”,修改盘符,或者修改安装路径,单击Next按钮。图3-7 输入服务器名称到此已经完成SAMCEF软件的安装,安装后在桌面上将出现SAMCEF Field图标。......
2025-09-30

另一方面,一个局部FEA数据既不是命名的也不是保存的主体。单击鼠标右键,在弹出的快捷菜单中选择一个FEA数据类型。现在,一个新的FEA数据已经修改。单击OK按钮确认FEA数据已被删除或者单击Close按钮取消操作。......
2025-09-30

删除浮动目标可以删除那些对几何形状不必要的残余目标。图4-22 删除内部线操作a)初始结构 b)删除孔面之后 c)删除内部线之后4.删除子形状删除子形状功能是一个删除组合形状包含的部件的通用操作。图4-23 删除子形状对话框5.合并边当读入CAD几何模型后,一些线由大量连贯的线组成。......
2025-09-30
事实上,导入的几何由点、线或面组成。图3-36 缝合操作在数据树中选中几何对象benne,单击鼠标右键,弹出快捷菜单。将几何公差Tolerance设置为0.3mm。选择几何炸开命令Explode。我们可以注意到在线框状态有两组绿色线,即模型的外边缘线和方形孔边。单击Auto search,方形孔的4条边均变为蓝色。单击OK按钮,修补后的几何模型如图3-39所示。图3-37 填孔目录图3-38 选择孔边线图3-39 修补后的几何模型......
2025-09-30

图4-8 创建草图操作2.草图创建几何模型的流程在Modeler模块中进行草图建模的过程如下。在图形窗口中选择面定义工作面,二维几何在此平面上创建。使用设置参数对话框图标设置草图参数。表4-3 草图创建工具(续)4.草图约束在草图状态,如果有多余的几何约束,此模型就是“过”约束模型,模型中如果有过约束将会出现警告显示。......
2025-09-30
相关推荐