基准坐标系由三个基准平面、三个基准轴和原点组成,在基准坐标系中可以选择单个基准平面、基准轴或原点。基准坐标系可用来创建其他特征、约束草图和定位在一个装配中的组件等。下面通过图4.10.13所示的范例来说明创建基准坐标系的一般操作过程。选择下拉菜单命令,系统弹出图4.10.14所示的“基准CSYS”对话框。在建模过程中,经常需要对工作坐标系进行操作,以便于建模。图4.10.15 “CSYS”对话框◆ :通过两个矢量来创建一个坐标系。......
2023-10-17
UG NX 10.0中有三种坐标系:绝对坐标系、工作坐标系和基准坐标系。在使用软件的过程中经常要用到坐标系,下面对这三种坐标系进行简单的介绍。
1.绝对坐标系(ACS)
绝对坐标系是原点在(0,0,0)的坐标系,是固定不变的。
2.工作坐标系(WCS)
工作坐标系包括坐标原点和坐标轴,如图4.1.1所示。它的轴通常是正交的(即相互间为直角),并且遵守右手定则。说明
◆ 工作坐标系不受修改操作(删除、平移等)的影响,但允许非修改操作,如隐藏和分组。
◆ UG NX 10.0的部件文件可以包含多个坐标系,但是其中只有一个是WCS。
◆ 用户可以随时挑选一个坐标系作为WCS。系统用XC、YC和ZC表示工作坐标系的坐标。工作坐标系的XC-YC平面称为工作平面。
3.基准坐标系(CSYS)
基准坐标系由单独的可选组件组成,如图4.1.2所示,包括:
◆ 整个CSYS。
◆ 三个基准平面。
◆ 三个基准轴。
◆ 原点。
可以在CSYS中选择单个基准平面、基准轴或原点,也可以隐藏CSYS及其单个组成部分。
4.右手定则(www.chuimin.cn)
◆ 常规的右手定则。
如果坐标系的原点在右手掌,拇指向上延伸的方向对应于某个坐标轴的方向,则可以利用常规的右手定则确定其他坐标轴的方向。例如,在图4.1.3中,假设拇指指向ZC轴的正方向,食指伸直的方向对应于XC轴的正方向,中指向外延伸的方向则为YC轴的正方向。
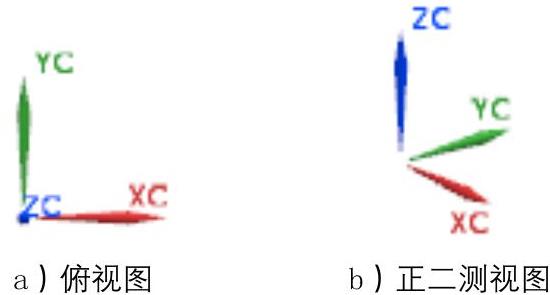
图4.1.1 工作坐标系(WCS)

图4.1.2 基准坐标系(CSYS)
◆ 旋转的右手定则。
旋转的右手定则用于将矢量和旋转方向关联起来。
当拇指伸直并且与给定的矢量对齐时,则弯曲的其他四指就能确定该矢量关联的旋转方向。反过来,当弯曲手指表示给定的旋转方向时,则伸直的拇指就确定关联的矢量。
例如,在图4.1.4中,如果要确定当前坐标系的旋转逆时针方向,那么拇指就应该与ZC轴对齐,并指向其正方向,此时逆时针方向即为四指从XC轴正方向向YC轴正方向旋转。

图4.1.3 常规的右手定则
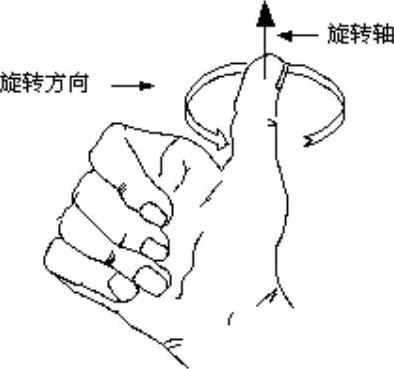
图4.1.4 旋转的右手定则
有关UG NX 10.0快速入门及应用技巧的文章

基准坐标系由三个基准平面、三个基准轴和原点组成,在基准坐标系中可以选择单个基准平面、基准轴或原点。基准坐标系可用来创建其他特征、约束草图和定位在一个装配中的组件等。下面通过图4.10.13所示的范例来说明创建基准坐标系的一般操作过程。选择下拉菜单命令,系统弹出图4.10.14所示的“基准CSYS”对话框。在建模过程中,经常需要对工作坐标系进行操作,以便于建模。图4.10.15 “CSYS”对话框◆ :通过两个矢量来创建一个坐标系。......
2023-10-17

在定义模具坐标系前,首先要分析产品的结构、产品的脱模方向和分型面,然后再定义模具坐标系。定义模具坐标系之前,要先把产品坐标系调整到模具坐标系相应的位置,然后再用注塑模向导中定义模具坐标系的功能去定义。选择下拉菜单命令,系统弹出图14.3.1所示的“CSYS”对话框。对话框图14.3.4 定义后的模具坐标系锁定模具坐标系。在“模具CSYS”对话框中选择单选按钮,单击按钮,完成坐标系的锁定。......
2023-10-17

图8.2.1 突出块钣金壁(一)创建“平板”的两种类型选择下拉菜单命令后,系统弹出图8.2.2a所示的“突出块”对话框(一),创建完成后再次选择下拉菜单命令时,系统弹出图8.2.2b所示的“突出块”对话框(二)。图8.2.2 “突出块”对话框图8.2.2a所示的“突出块”对话框(一)中的选项的说明如下。......
2023-10-17

UG NX 10.0中提供了多种功能模块,它们既相互独立又相互联系。基本环境是执行其他交互应用模块的先决条件,是用户打开UG NX 10.0进入的第一个应用模块。◆ 编辑UG NX 10.0复合建模的表达式——提供UG NX 10.0和Xess电子表格之间概念模型数据的无缝转换。注意以上有关UG NX 10.0的功能模块的介绍仅供参考,如有变动应以UGS公司最新相关的正式资料......
2023-10-17

高级空间曲线在曲面建模中的使用非常频繁,主要包括螺旋线、样条曲线、二次曲线、规律曲线和文本曲线等。下面通过创建图6.1.15所示的样条曲线,来说明使用“根据极点”命令创建样条曲线的一般过程。图6.1.15 使用“根据极点”命令创建样条曲线图6.1.16 定义极点说明在本例中点的组合顺序还有多种,在此仅以一种情况说明选点顺序对样条曲线形状的影响。......
2023-10-17
曲面的偏置用于创建一个或多个现有面的偏置曲面,从而得到新的曲面。图6.5.1 偏置曲面的创建图6.5.2 偏置方向(一)定义偏置方向。图6.5.3 偏置面选择下拉菜单命令,系统弹出“偏置面”对话框。在图形区选取图6.5.3a所示的曲面,在“偏置面”对话框的文本框中输入数值10,并单击“反向”按钮,单击按钮,完成曲面的偏置操作。......
2023-10-17

下面具体介绍安装UG NX 10.0应用程序的安装过程。在服务器上准备好许可证文件首先将合法获得的UG NX 10.0许可证文件NX10.0.lic复制到计算机中的某个位置,如C:\ug10.0\NX10.0.lic。图1.2.1 修改许可证文件并保存安装许可证管理模块将UG NX 10.0软件安装光盘放入光驱内,等待片刻后,系统会弹出“NX 10.0 Software Installation”对话框。系统弹出如图1.2.2所示的“Siemens NX 10.0InstallShield Wizard”对话框,确认文本框中的“28000@”后面已是本机的计算机名称,单击按钮。图1.2.2 “Siemens NX 10.0InstallShield Wizard”对话框选中单选项,单击按钮。......
2023-10-17

图8.1.2 “钣金首选项”对话框(一)◆ 在区域中可以设置以下四个参数。图8.1.4 “钣金首选项”对话框(三)在“钣金首选项”对话框中单击选项卡,此时“钣金首选项”对话框(四)如图8.1.5所示。图8.1.6 “钣金首选项”对话框(五)......
2023-10-17
相关推荐