对公共照明电路进行检修时,我们将公共照明电路的检修分为两部分,第一部分是小区照明控制电路。图7-53 断开控制箱中的总断路器2.公路照明控制电路的检修方法当公路照明控制电路中出现故障时,应查看该照明系统的控制方式,如图7-54所示。公路照明控制电路由路灯控制器将供电电压转换为路灯所需的工作电压。若公路照明控制电路中的一盏照明灯不能正常点亮时,则应根据检修流程进行检查。......
2025-09-29
车辆使用的灯光可按用途分类,即用于照明、信号或指示。例如,前照灯用于夜间照明,转向信号灯用于向其他车辆和行人发出信号,尾灯则指示自己车辆的存在和位置。除了一般的照明系统,根据地区和等级,车辆还装有不同功能的系统,主要有尾灯警告系统、前后雾灯系统、白天行车灯光(Daytime Running Lamps,DRL)系统、灯光提醒蜂鸣器系统/灯光自动关闭系统、自动灯光控制系统、前照灯光束水平控制系统、进车照明系统和车内灯提醒系统等。
1.尾灯系统
有的车的尾灯直接连接到灯光控制开关,为直接连接型(图3⁃37a);有的车则带有尾灯继电器,为尾灯继电器型(图3⁃37b)。还有的车如前所述,由车身ECU控制的尾灯系统。
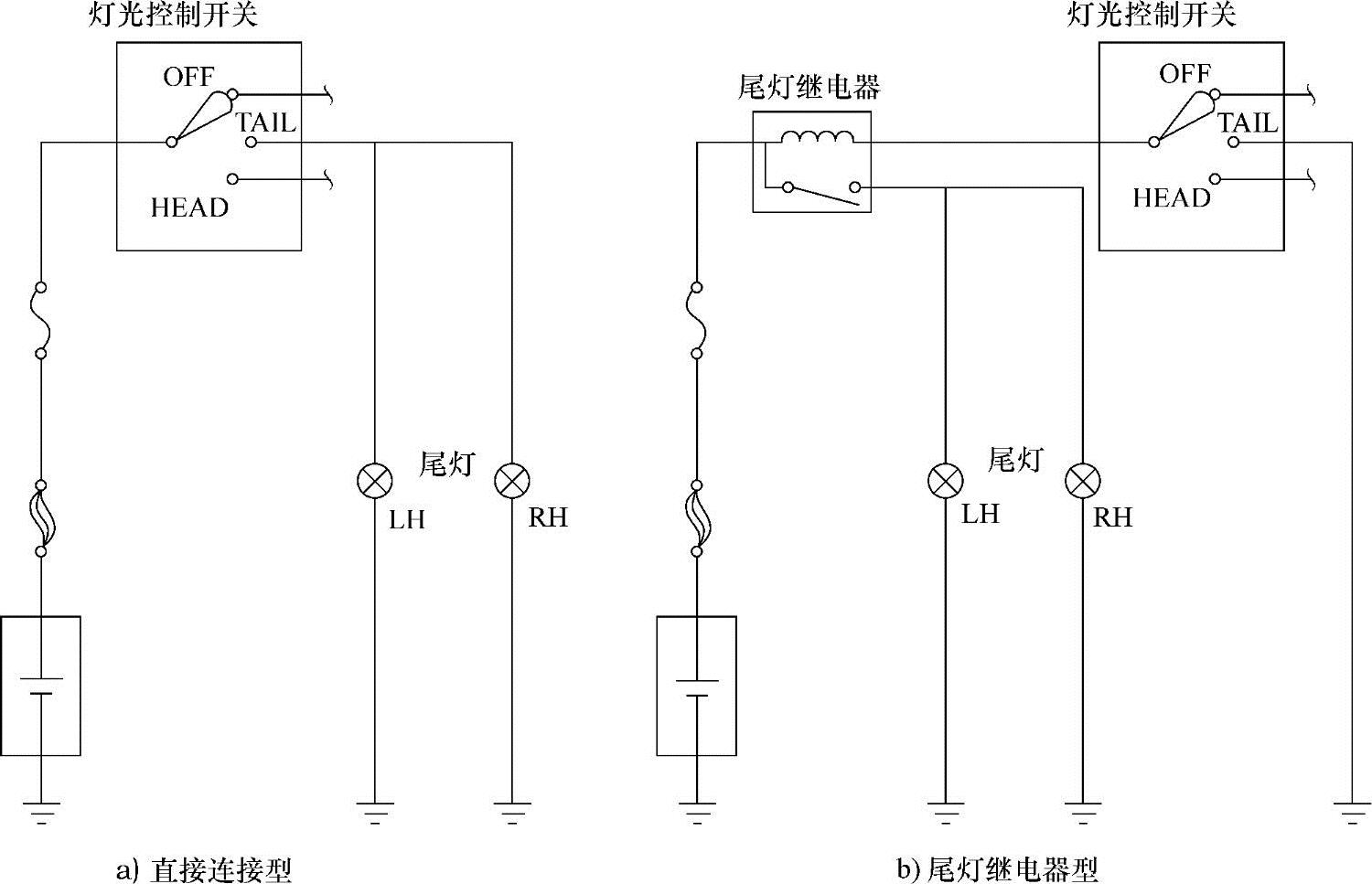
图3⁃37 常见尾灯电路
有些车型带有尾灯警告系统,如图3⁃38所示。由于尾灯、停车灯等的灯泡烧坏时无法从驾驶人处看到,所以有些车型采用了尾灯警告系统。尾灯警告系统通过组合仪表中的警告指示灯通知驾驶人诸如尾灯和停车灯灯泡损坏。系统由灯光故障探测器控制,此探测器一般装在行李箱中。
灯光故障继电器通过比较灯光正常时和线路开路时的电压检测灯泡是否烧掉。
尾灯警告系统的工作情况如下:
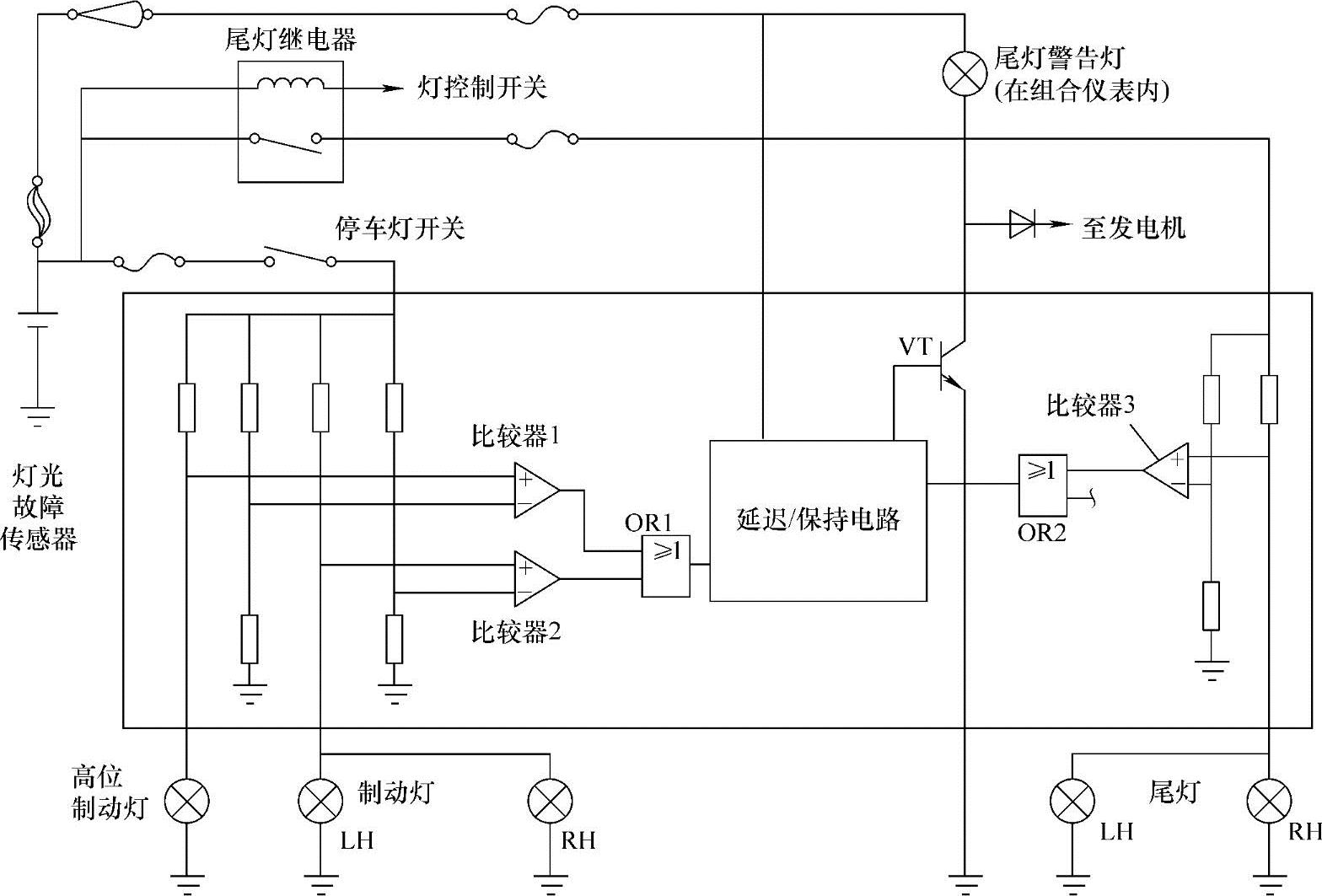
图3⁃38 尾灯警告系统电路
(1)高位停车灯(高位制动灯)故障报警(图3⁃39)和停车灯(制动灯)故障报警(图3⁃40) 当停车灯和高位停车灯正常运行且点亮时,比较器1和2正侧的电压低于输入到负侧的标准电压,因此比较器1和2输出“0”。
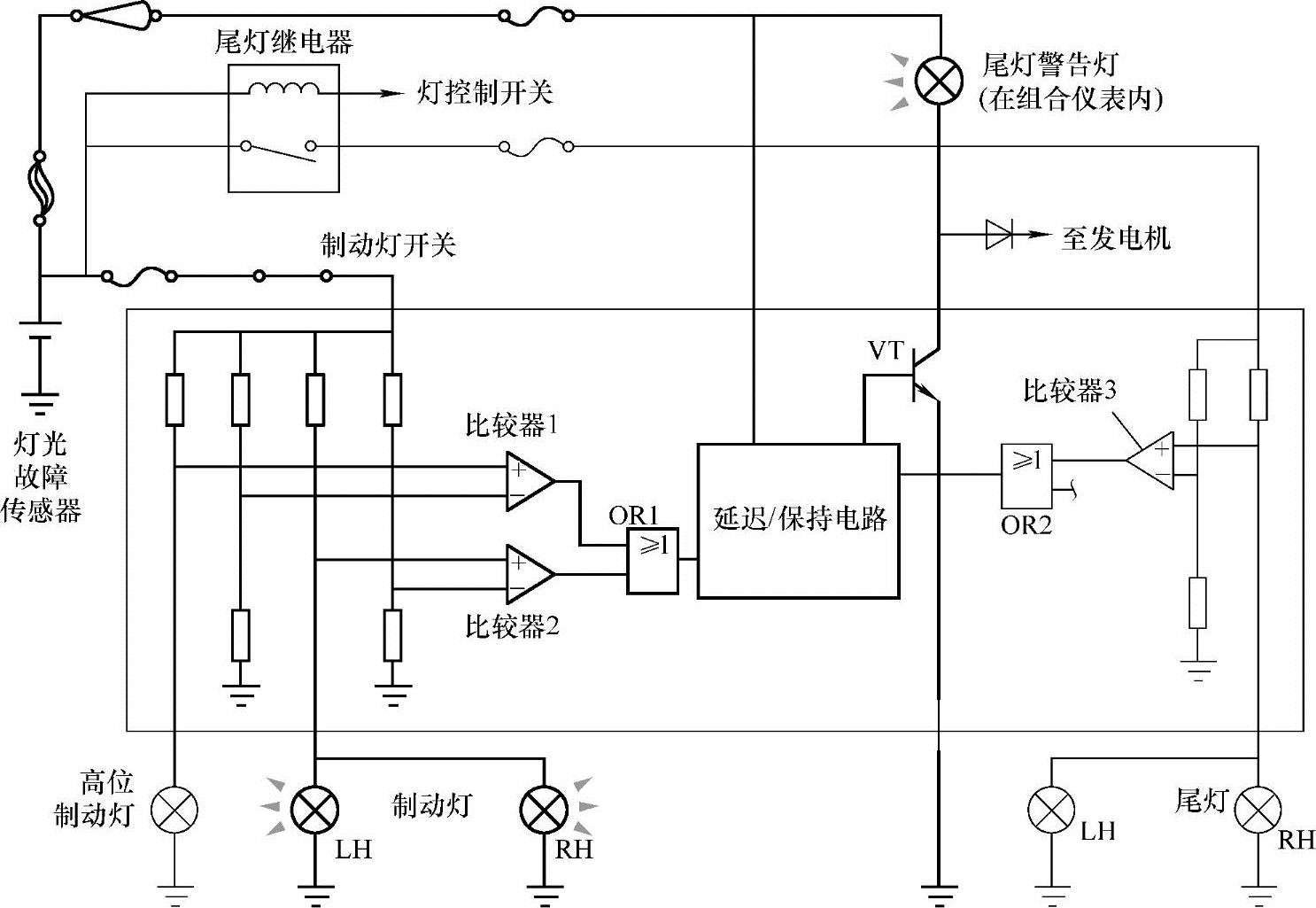
图3⁃39 高位制动灯故障报警的工作原理
因此,VT保持OFF状态并且尾灯警告灯熄灭。由此状态,即使只有一条照明电路开路,比较器正侧的电压也会上升,并变得高于负侧的标准输入电压,因此比较器1或2输出“1”到或门OR1。
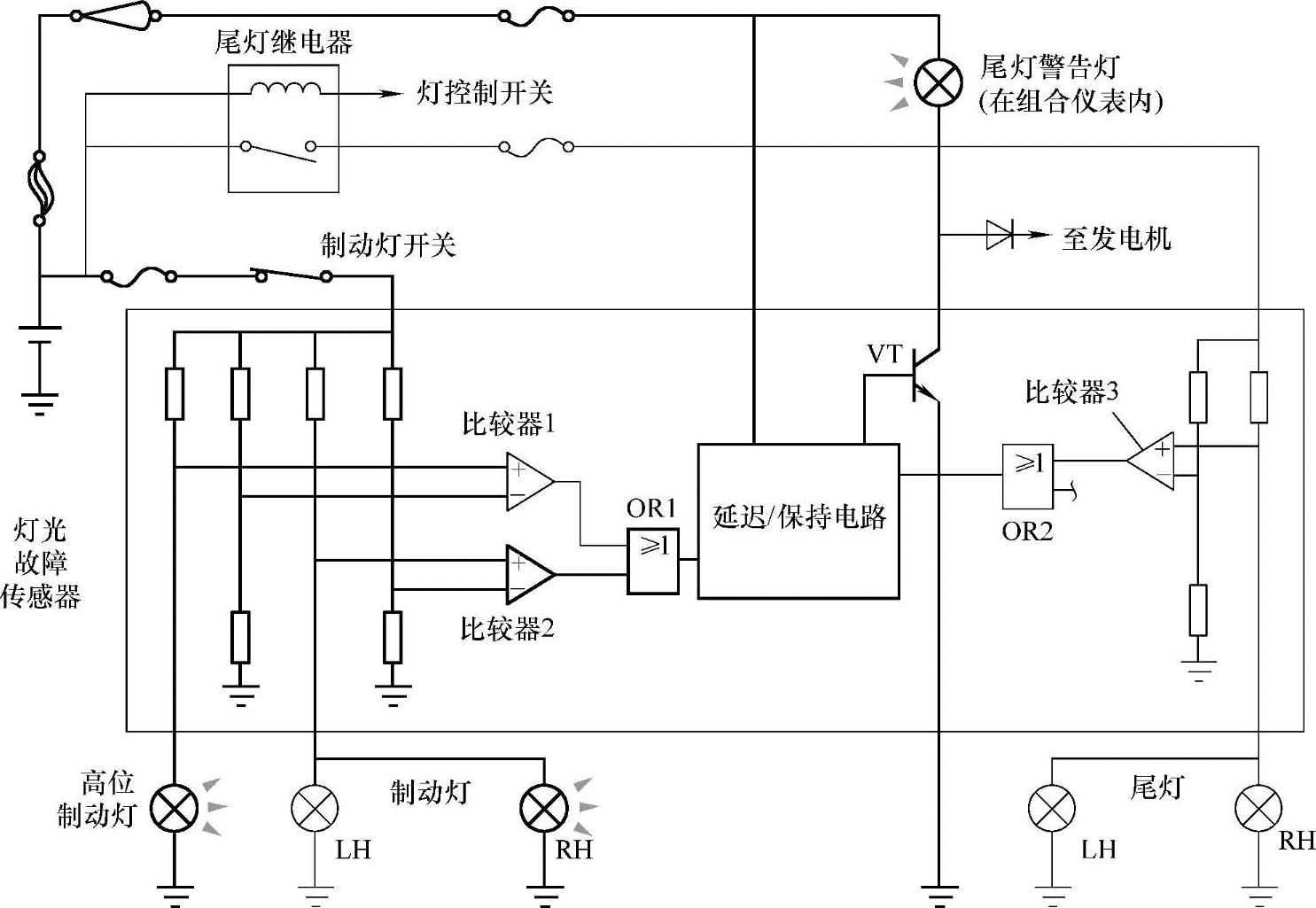
图3⁃40 制动灯故障报警的工作原理
OR1输出“1”到延时/保持电路,延时/保持电路在0.3~0.5s后开通VT。这将点亮组合仪表上的尾灯警告灯。
保持电路一直运行到点火开关关掉。因此,警告灯一直亮着。
(2)尾灯开路故障报警(图3⁃41) 像停车灯电路一样,当尾灯电路开路时,比较器3判断电压已经改变并输出“1”至OR2。从OR2发送一个信号到延迟/保持电路,再到VT,尾灯警告灯点亮。
如果采用由车身ECU控制的尾灯系统,主车身ECU接收灯控开关TAIL信号以控制尾灯继电器;有的还带有自动灯光系统,则当灯控开关置于AUTO位置时,主车身ECU接收来自自动灯控传感器的环境照明等级信号以控制尾灯继电器。在该系统中当任一灯泡没有亮起时,检查这个灯泡或与其相关的线束。当与TAIL继电器相关的所有车灯都不亮而TAIL熔丝却正常时,进行尾灯继电器主动测试,并读取数据表中灯控开关TAIL信号的数值,以确定故障发生在开关侧还是继电器侧。有的尾灯继电器安装在仪表板接线盒上,可能不能像常规继电器那样能够拆下来检查。
2.前、后雾灯系统
车辆在较低的能见度比如雾天行驶时,应使用前、后雾灯系统。常见的前、后雾灯系统电路如图3⁃42所示。
在能见度较差的情况下(如大雾中或者下雨天时)行驶时,启用前雾灯控制以保持前方道路的能见度;启用后雾灯控制,使后方来车注意到车辆的存在。
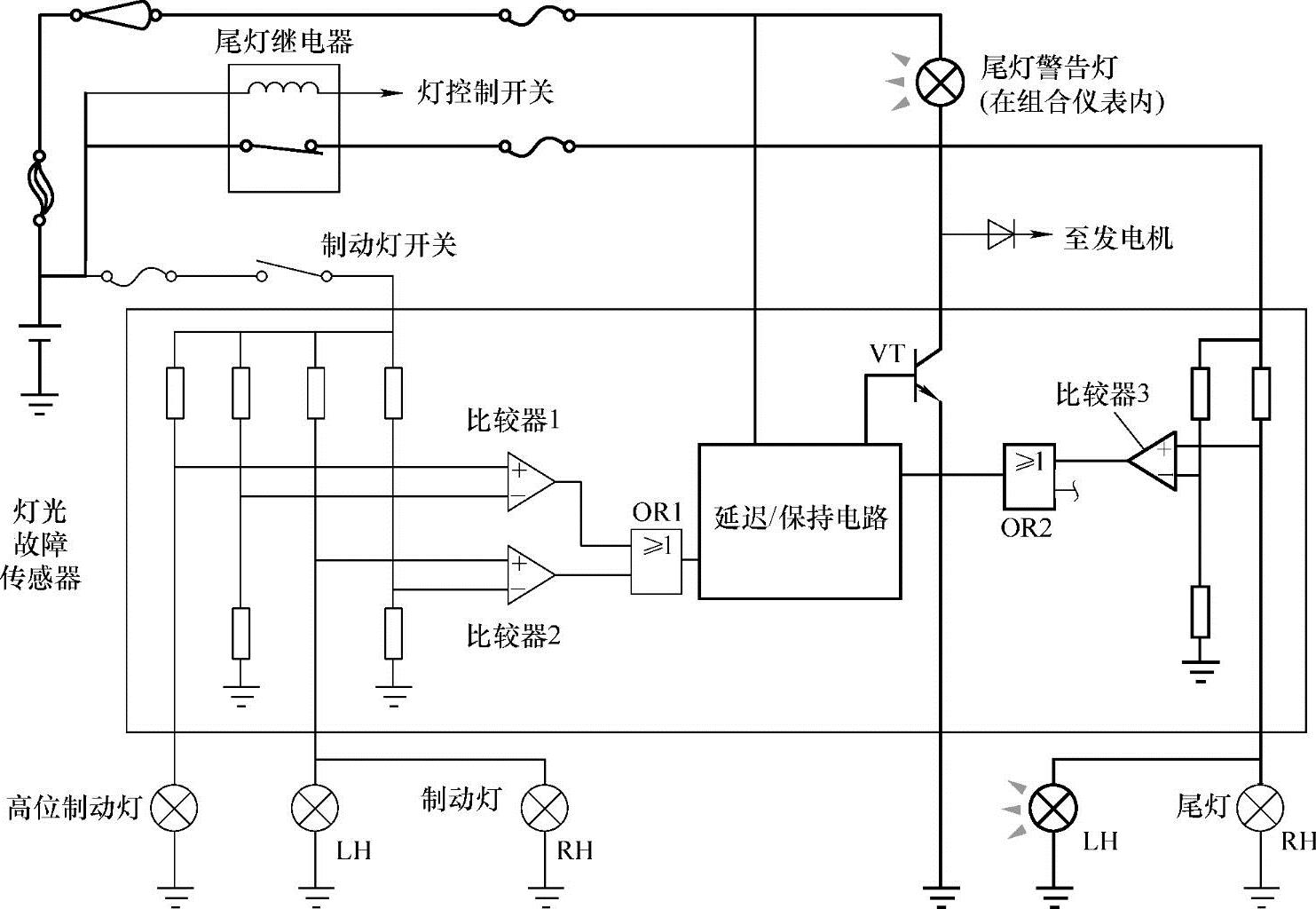
图3⁃41 尾灯故障报警的工作原理
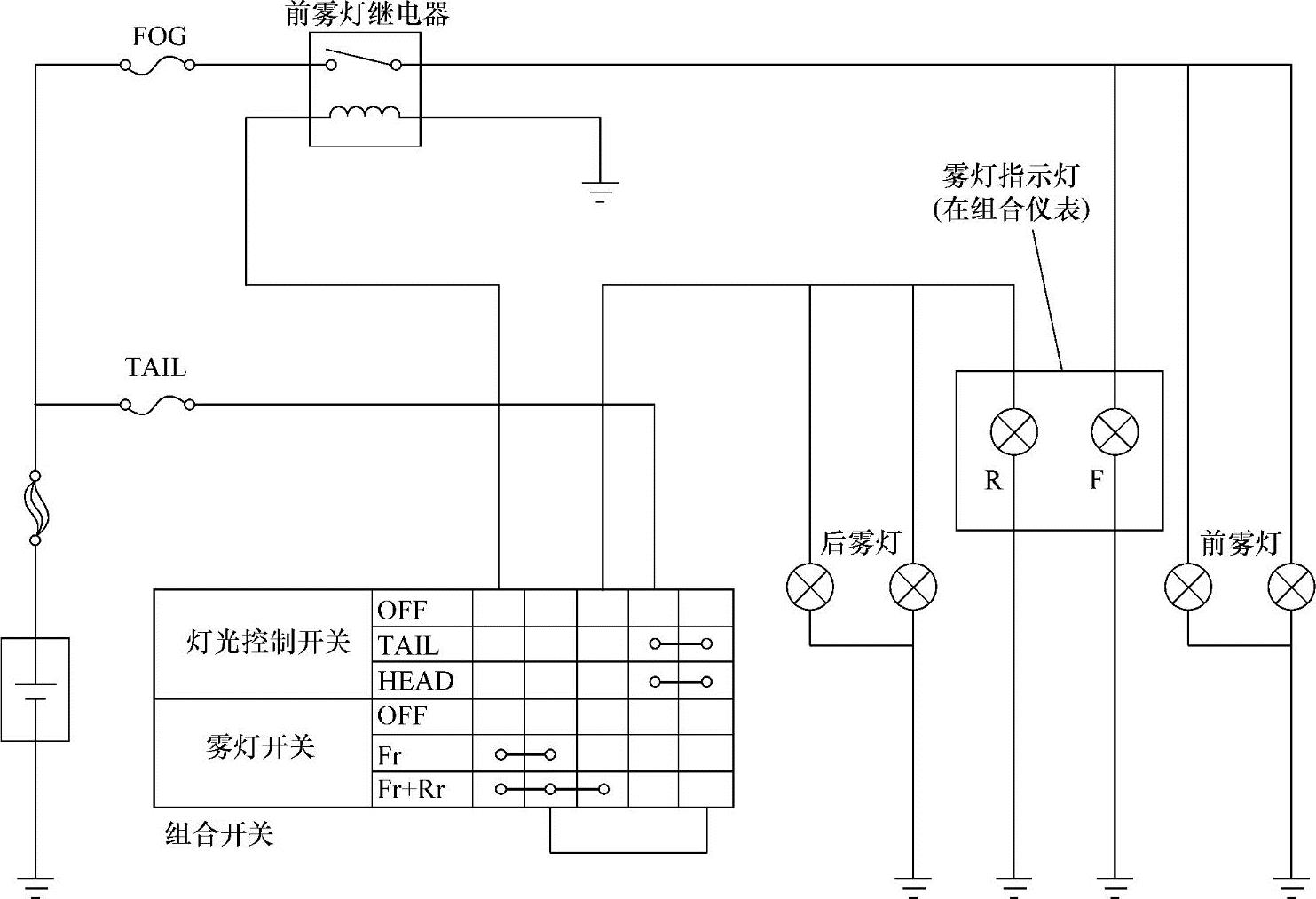
图3⁃42 常见的前、后雾灯系统电路
(1)前雾灯的操作(图3⁃43) 当灯光控制开关在TAIL和HEAD位置时,前雾灯可以操作。当前雾灯开关置于ON位置时,前雾灯继电器运行,并且前雾灯点亮。
一般当同时满足下列两个条件时,前雾灯亮起:通过自动灯控或手动灯控使尾灯亮起;前雾灯开关置于ON位置。
当符合下列任一条件时,前雾灯熄灭:前雾灯开关置于OFF位置;尾灯熄灭。
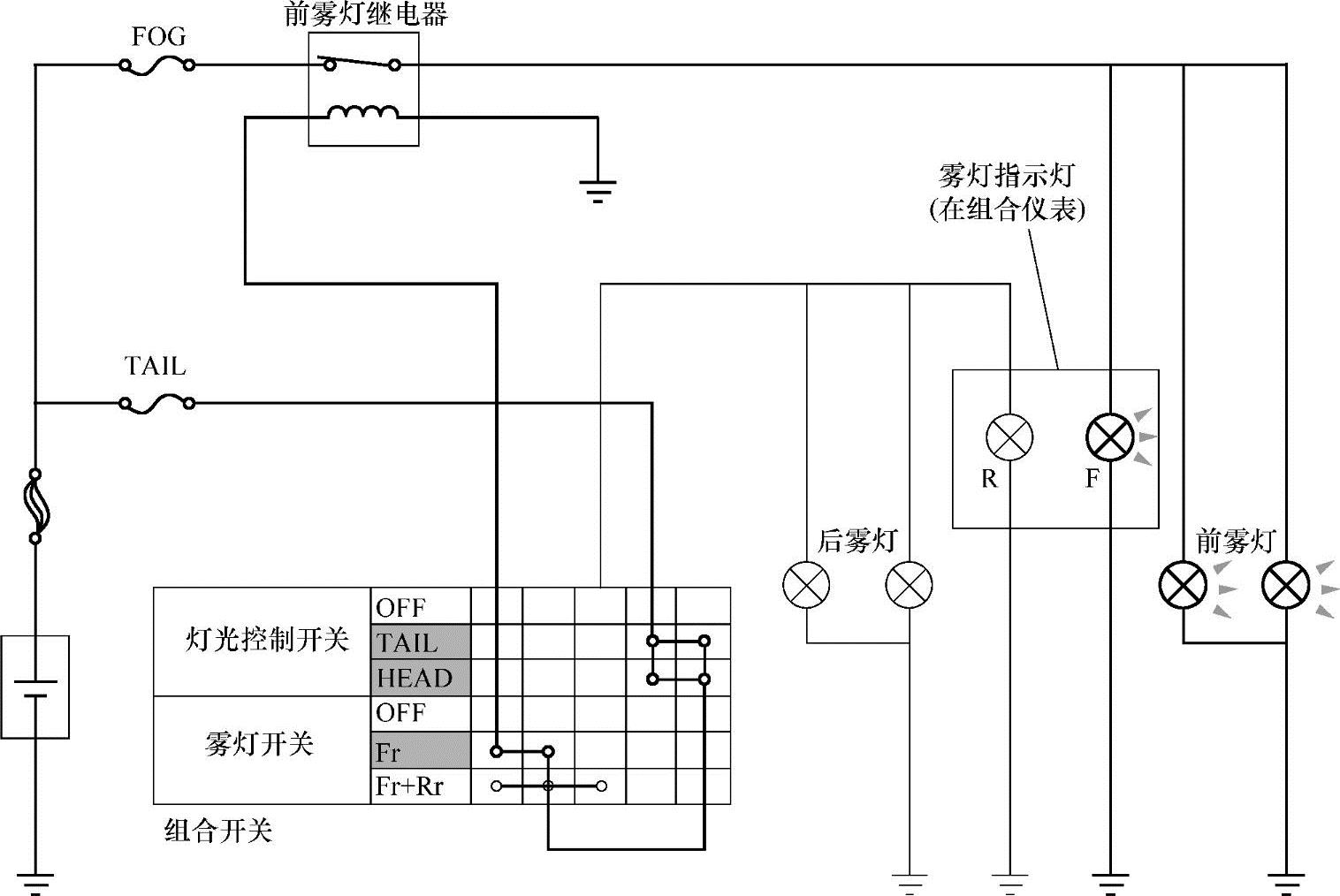
图3⁃43 前雾灯的工作情况
当同时满足下列所有条件时,后雾灯亮起:用自动灯控或手动灯控使近光前照灯亮起;前雾灯点亮;后雾灯开关置于ON位置。
当符合下列任何条件时,后雾灯熄灭:尾灯熄灭;前雾灯开关置于OFF位置;后雾灯开关置于OFF位置。
(2)后雾灯的操作(图3⁃44) 像前雾灯一样,当灯光控制开关在TAIL和HEAD位置时,后雾灯可以操作。如果开关从前雾灯开关的ON位置进一步前移,后雾灯开关接通。
提示:后雾灯有防止驾驶人忘记关灯的结构。当后雾灯置于ON位置时,灯光控制开关被移动到OFF位置,后雾灯自动关掉。
一旦发生这种情况,后雾灯将保持OFF状态,即使灯光控制开关再次被开到HEAD位置。此功能根据车型由机械或电气控制。图3⁃44所示电路为机械控制用的。
3.自动灯光控制系统
当天黑需要打开前照灯时,一般是驾驶人操作灯光的控制开关。但在自动灯光控制中,当灯光控制开关置于AUTO(自动)位置时,自动照明控制传感器检测环境的照明水平。当暗的时候,系统自动打开前照灯。自动灯光控制系统如图3⁃45所示。自动照明控制传感器位于仪表盘的上部。某些车辆在照明开关上没有AUTO位置。在这种情况下,自动照明控制系统在OFF位置工作。
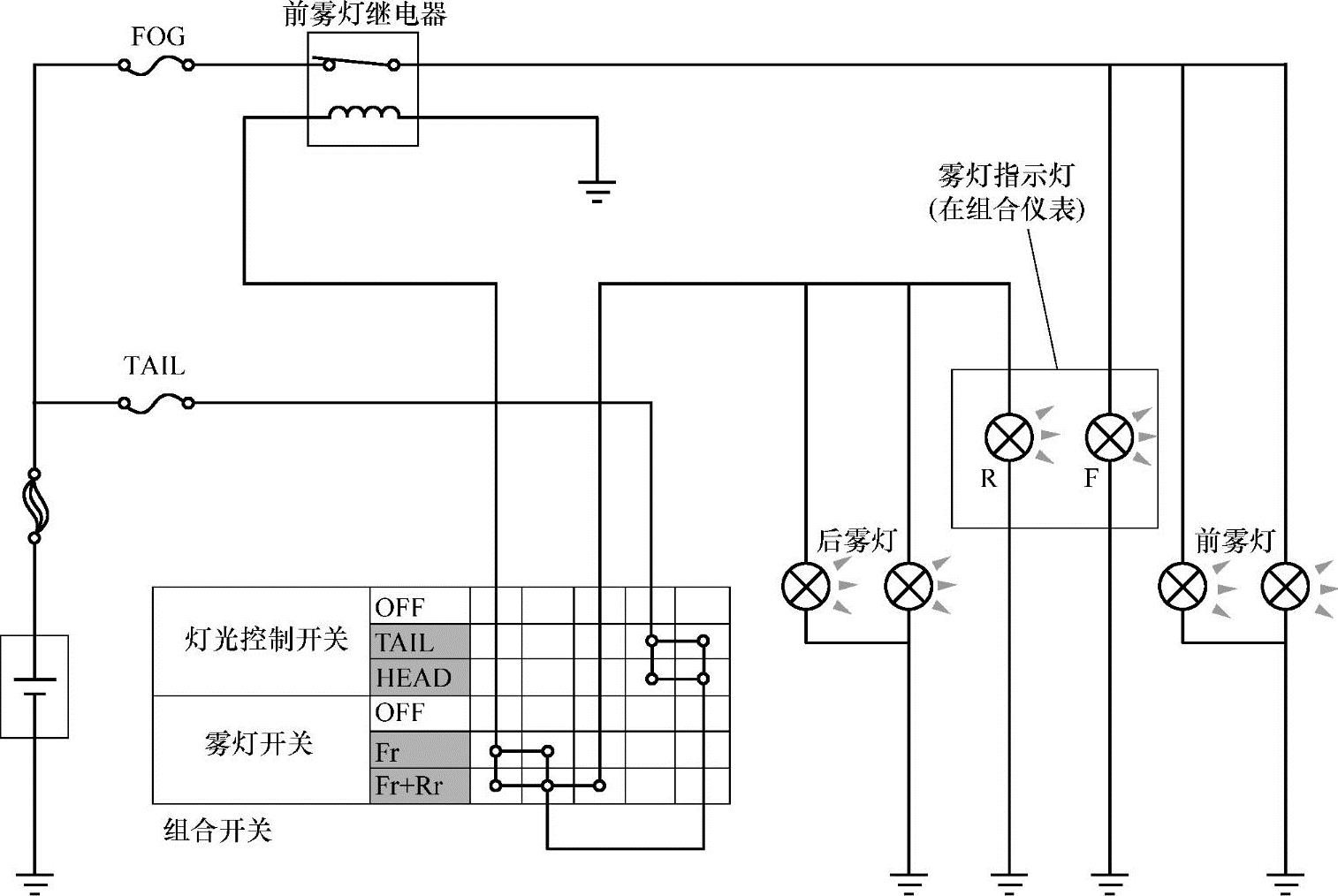
图3⁃44 后雾灯的工作情况
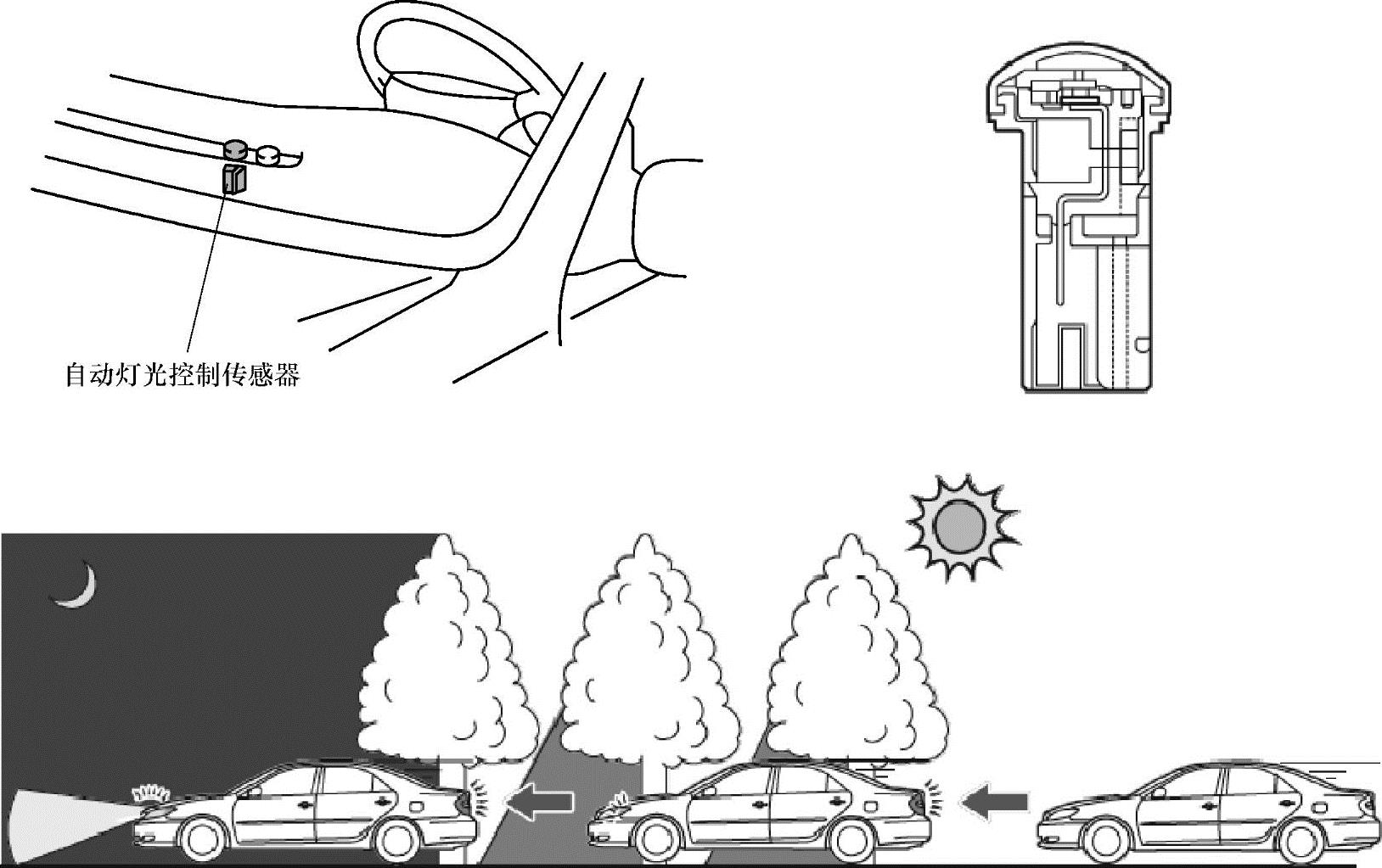
图3⁃45 自动灯光控制系统
自动灯光控制传感器在灯光控制开关置于AUTO位置时(无AUTO位置的车型则为OFF位置)检测环境的亮度水平,它向灯光控制装置发送一条信息,根据环境亮度状况,先开尾灯,然后开前照灯。
系统还有一种功能:当环境亮度忽明忽暗时打开尾灯,但不使前照灯忽明忽灭。例如在桥下行驶或者沿林荫道行驶时。但是若是一定时间过去后,环境亮度仍低于规定值,前照灯将点亮。
自动灯光控制系统有各种各样的类型,这取决于车型。例如某种车型上,自动灯光控制传感器和灯光控制装置成为一体;或者另有一种类型,尾灯和前照灯同时点亮。
自动灯光控制系统电路如图3⁃46所示,自动灯光控制系统工作情况如图3⁃47所示。
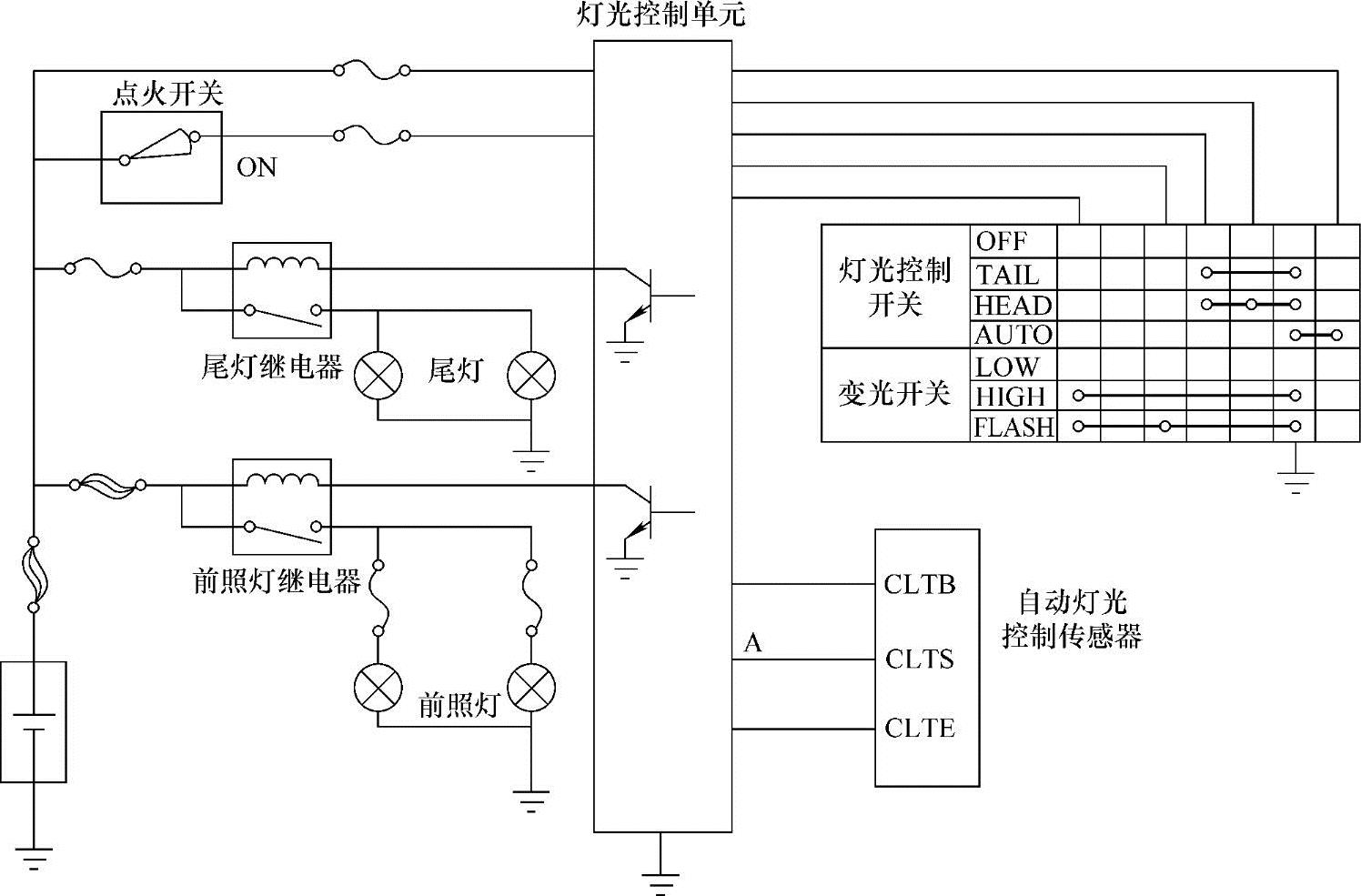
图3⁃46 自动灯光控制系统电路
当自动灯光控制传感器检测环境的照明水平时,它向灯光控制装置的端子A输出一个脉冲信号。当灯光控制装置判断出环境照明下降时,它触发尾灯和前照灯继电器,打开尾灯和前照灯。
当灯光控制装置判断环境照明提高时,尾灯和前照灯关掉。
丰田卡罗拉轿车自动灯光控制传感器的灵敏度可由专用诊断仪来设定。如图3⁃48所示,进入“MainBody”→“工具”→“定制”→“LightControl”→“灵敏度”,按提示操作。
4.前照灯光束水平手动控制系统
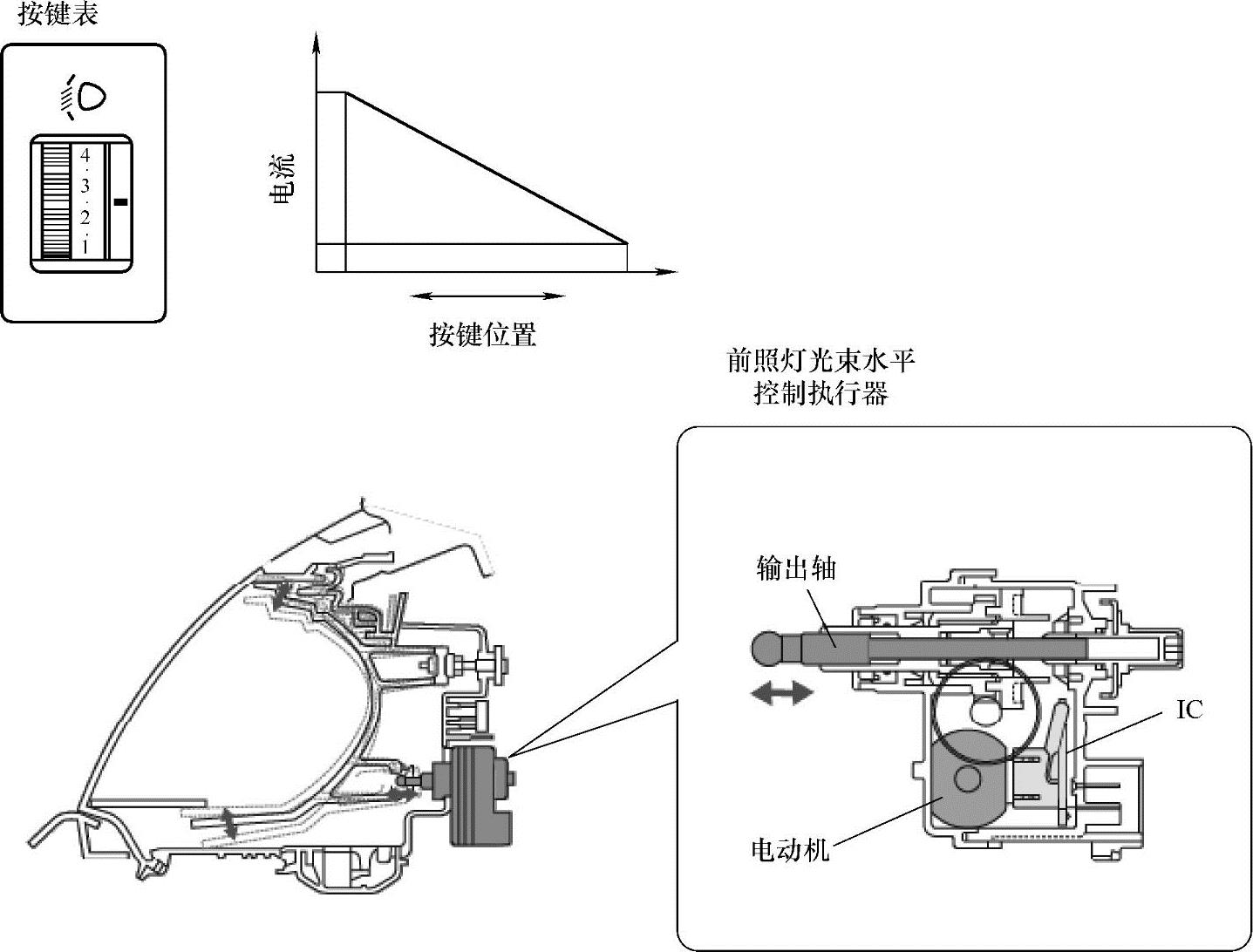
车辆的倾斜取决于负载(乘员数目和行李的数量)。在前照灯光束手动水平控制系统中,操作前照灯光束水平控制开关,调整前照灯的垂直角度,防止对面来车时驾驶人发生眩目。驾驶人可用前照灯光束水平控制开关(旋钮)上下调整前照灯的光束水平度。前照灯光束水平控制开关中有一只可变电阻,它根据旋钮位置输出相应的电流。
如图3⁃49所示,前照灯光束水平控制执行器执行器使电动机以顺时针或逆时针方向旋转,按照前照灯光束水平控制开关使输出轴前后移动,使前照灯的光束移上移下。执行器设有一只电位器。按照执行器的位置,发送一个信号到内部集成电路(IC)。
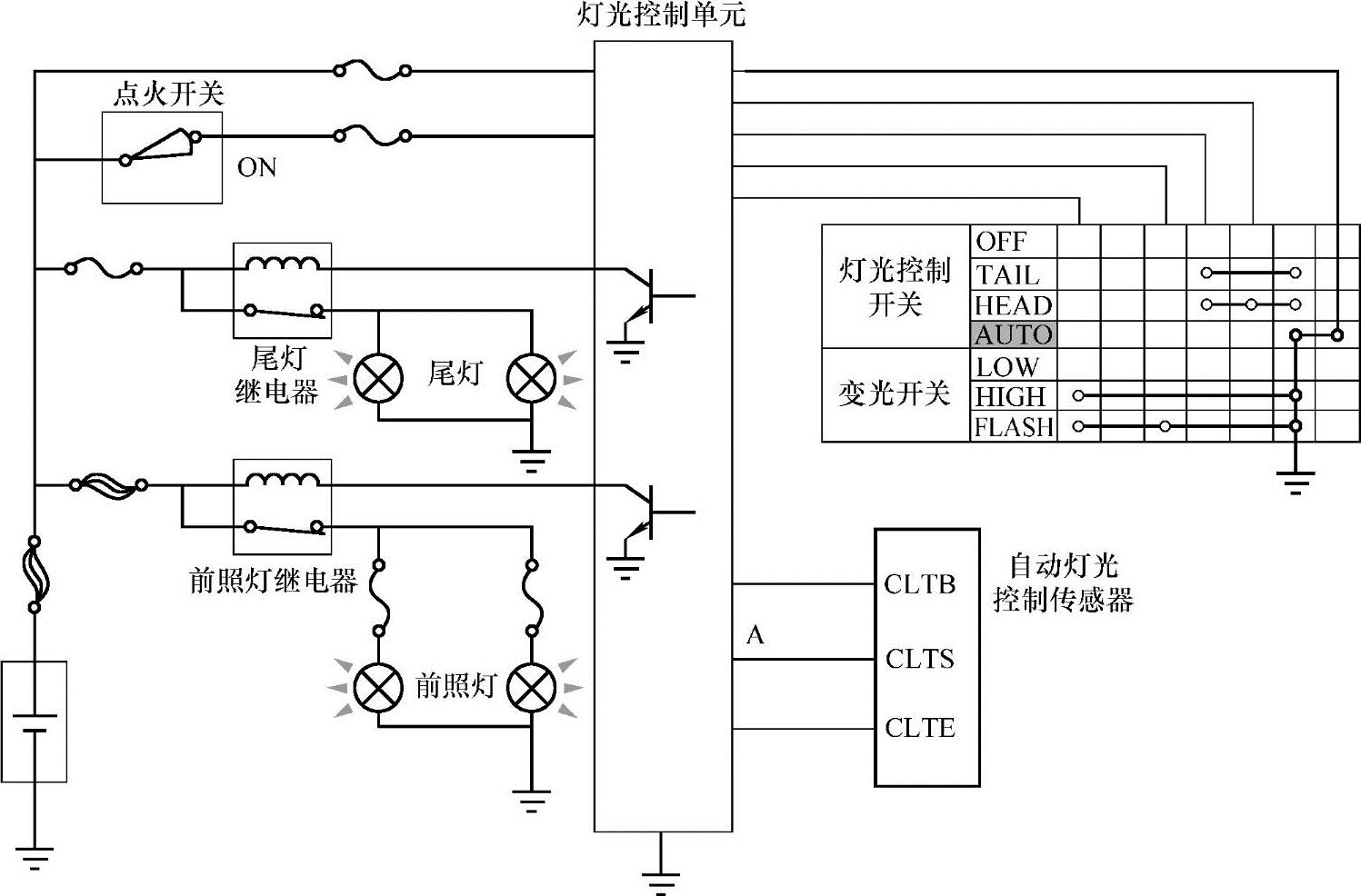
图3⁃47 自动灯光控制系统的工作情况
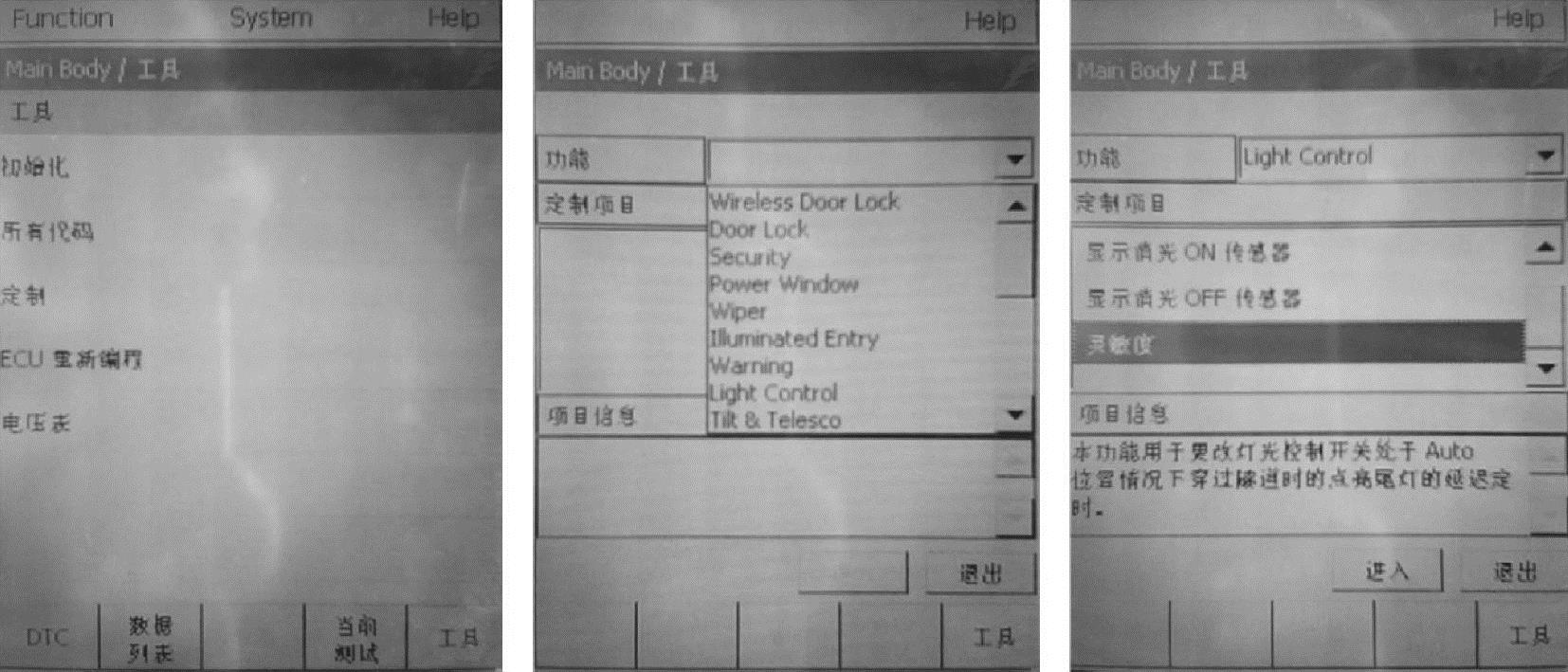
图3⁃48 用专用诊断仪设置丰田卡罗拉轿车自动灯光控制传感器的灵敏度
前照灯光束水平手动控制系统的工作情况如图3⁃50所示。与前照灯光束水平控制开关旋转角度成比例的电流从集成电路(IC)输出。执行器左侧和右侧的IC根据开关来的电流量驱动电动机。执行器中的IC同时用电位器检测执行器的实际位置(前照灯光束水平)并控制电动机的运行,使执行器按照来自开关的电流检测前照灯光束的水平位置。
 (https://www.chuimin.cn)
(https://www.chuimin.cn)
图3⁃49 带前照灯光束水平手动控制系统的前照灯总成
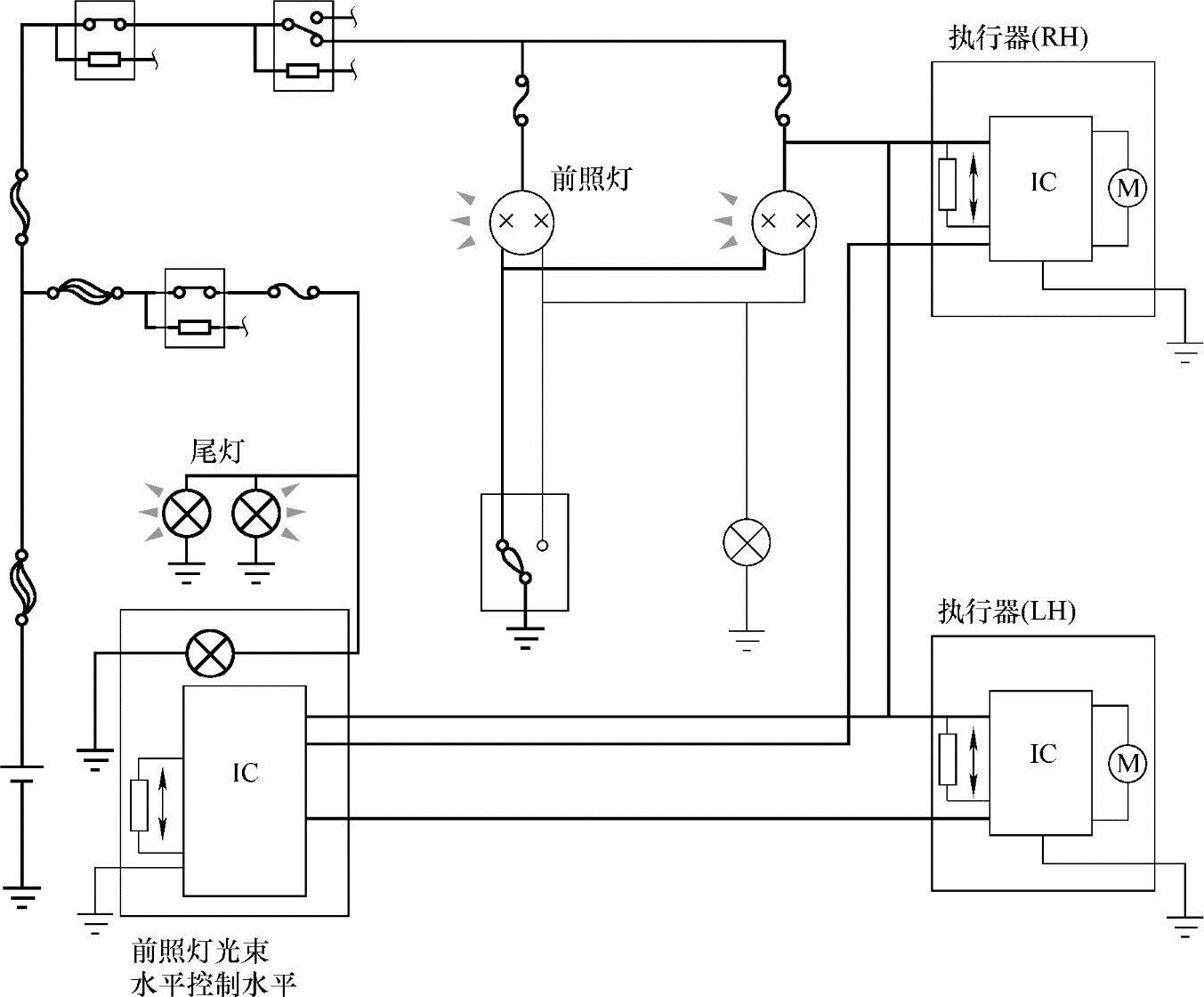
图3⁃50 前照灯光束水平手动控制系统的工作情况
5.前照灯光束水平自动控制系统
某些车辆中有一自动前照灯光束水平控制系统(前照灯光束高度自动控制系统),它自动将前照灯调到最佳垂直角度。
打开前照灯时,前照灯光束高度自动控制系统根据车辆姿态来操作前照灯光束高度调整执行器,如图3⁃51所示。
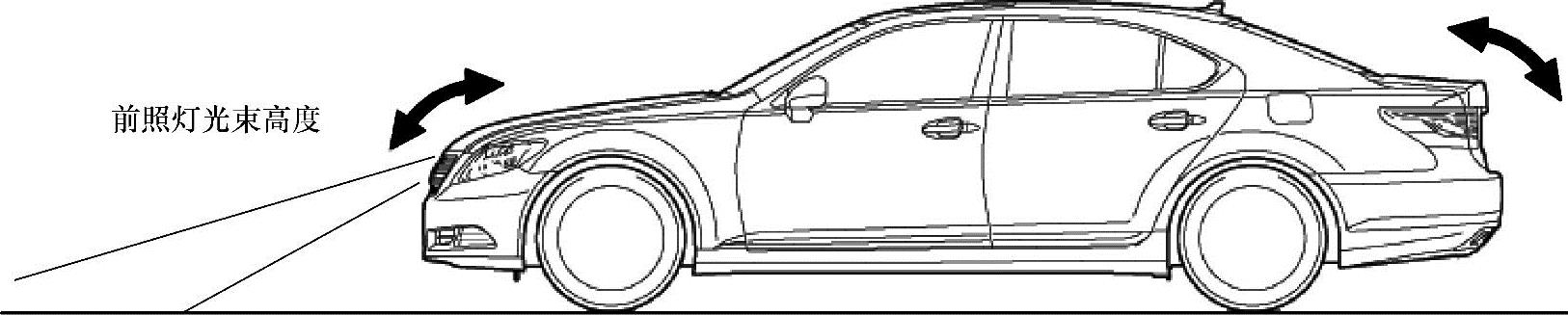
图3⁃51 根据车辆姿态来自动控制前照灯光束高度调整
图3⁃52为雷克萨斯LS460轿车的前照灯光束高度自动控制系统的组成示意图,该系统主要由AFS ECU(自适应前部照明系统ECU)、前/后高度控制传感器和两个前照灯光束高度调整执行器组成。
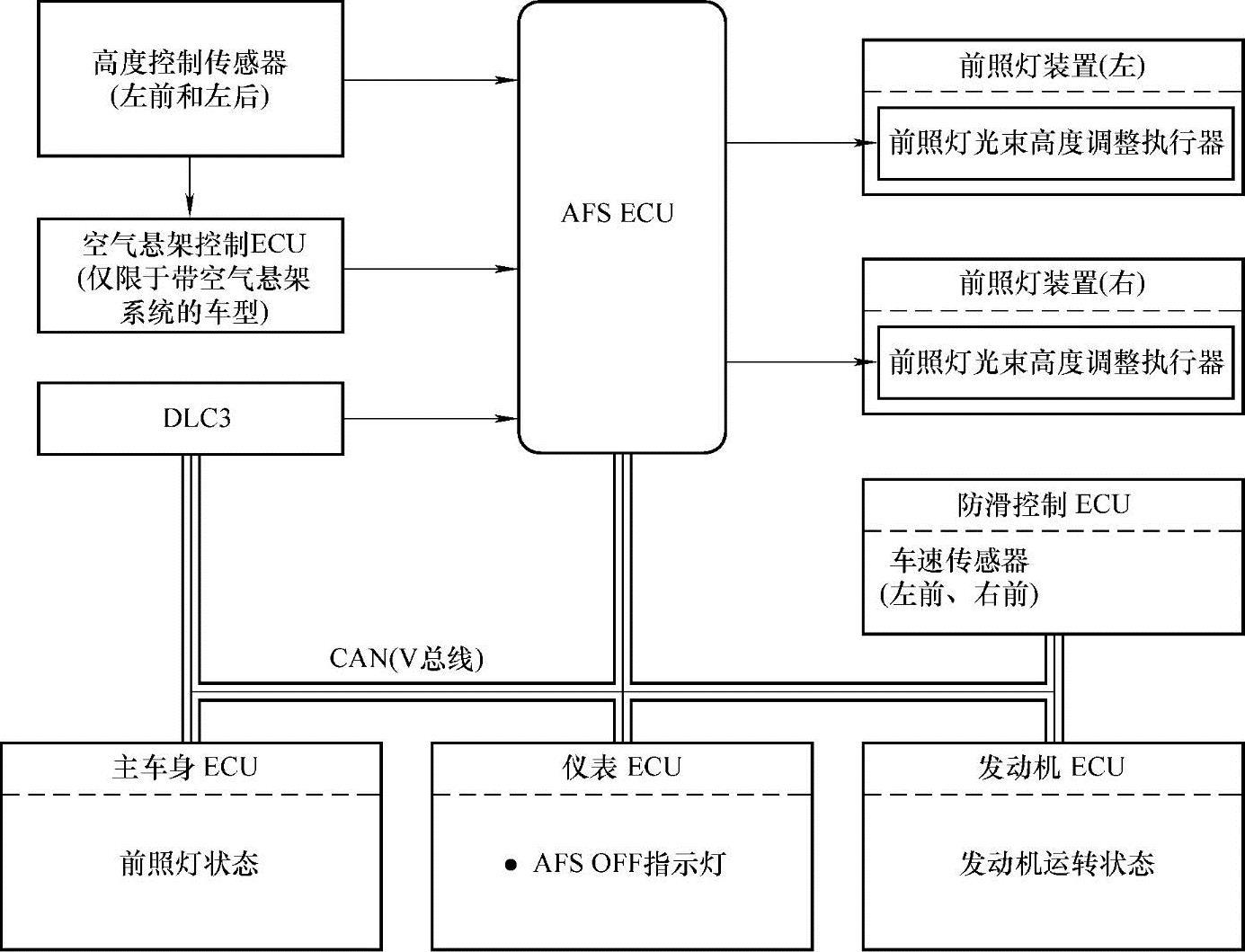
图3⁃52 雷克萨斯LS460轿车的前照灯光束高度自动控制系统的组成示意图
对于不带空气悬架系统的车型,AFS ECU可根据高度控制传感器(左前和左后)发出的信号来计算车辆姿态的变化。
对于带空气悬架系统的车型,AFS ECU可根据空气悬架ECU所发出的信号来计算车辆姿态的变化。然后,ECU根据此信息来控制前照灯光束高度调整执行器以改变前照灯反射器角度。
图3⁃53为雷克萨斯LS460轿车的前照灯光束高度自动控制系统主部件位置分布图。其主要部件的功能见表3⁃2。
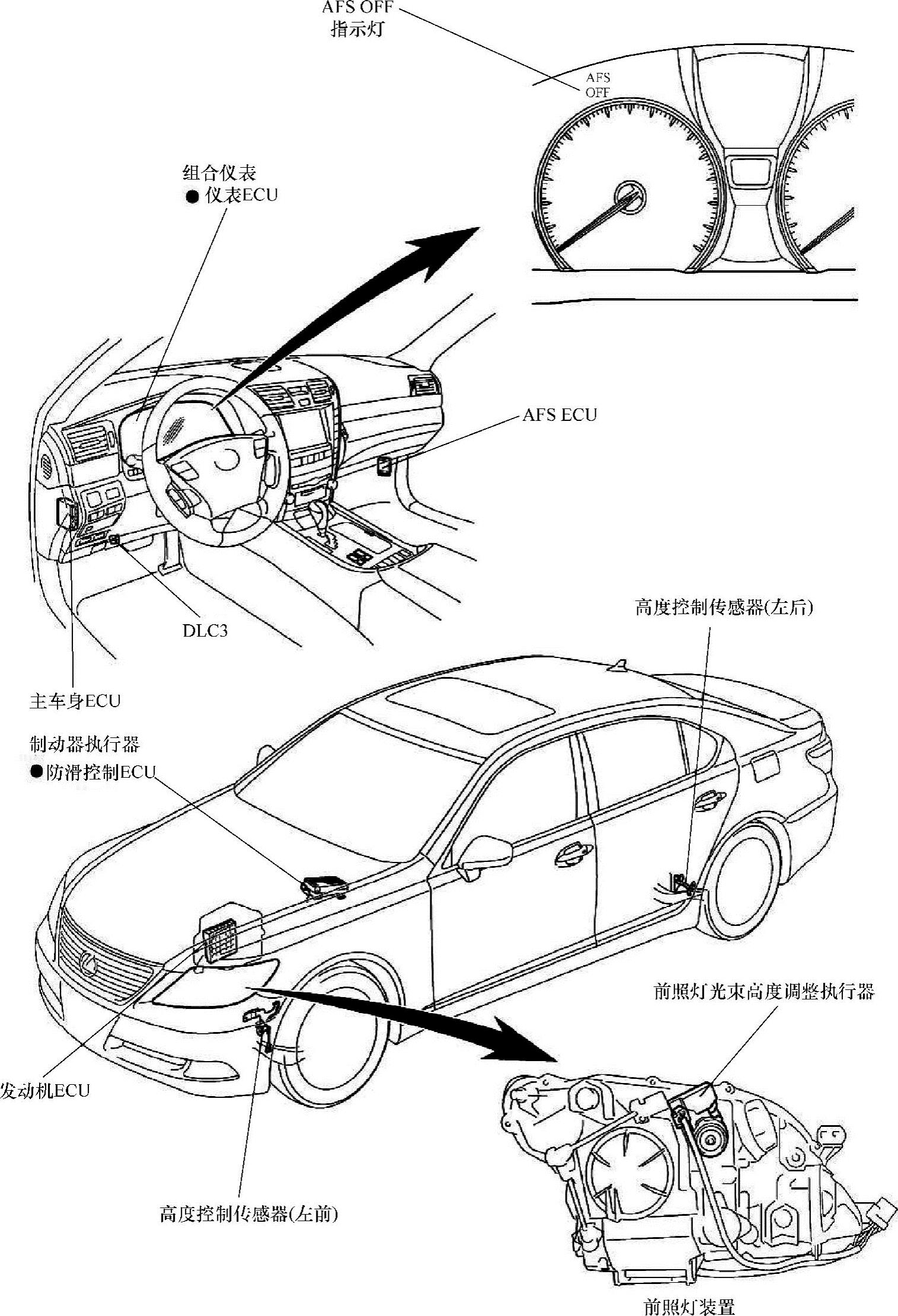
图3⁃53 雷克萨斯LS460轿车前照灯光束高度自动控制系统主部件位置分布图
表3⁃2雷克萨斯LS460轿车前照灯光束高度自动控制系统主要部件的功能
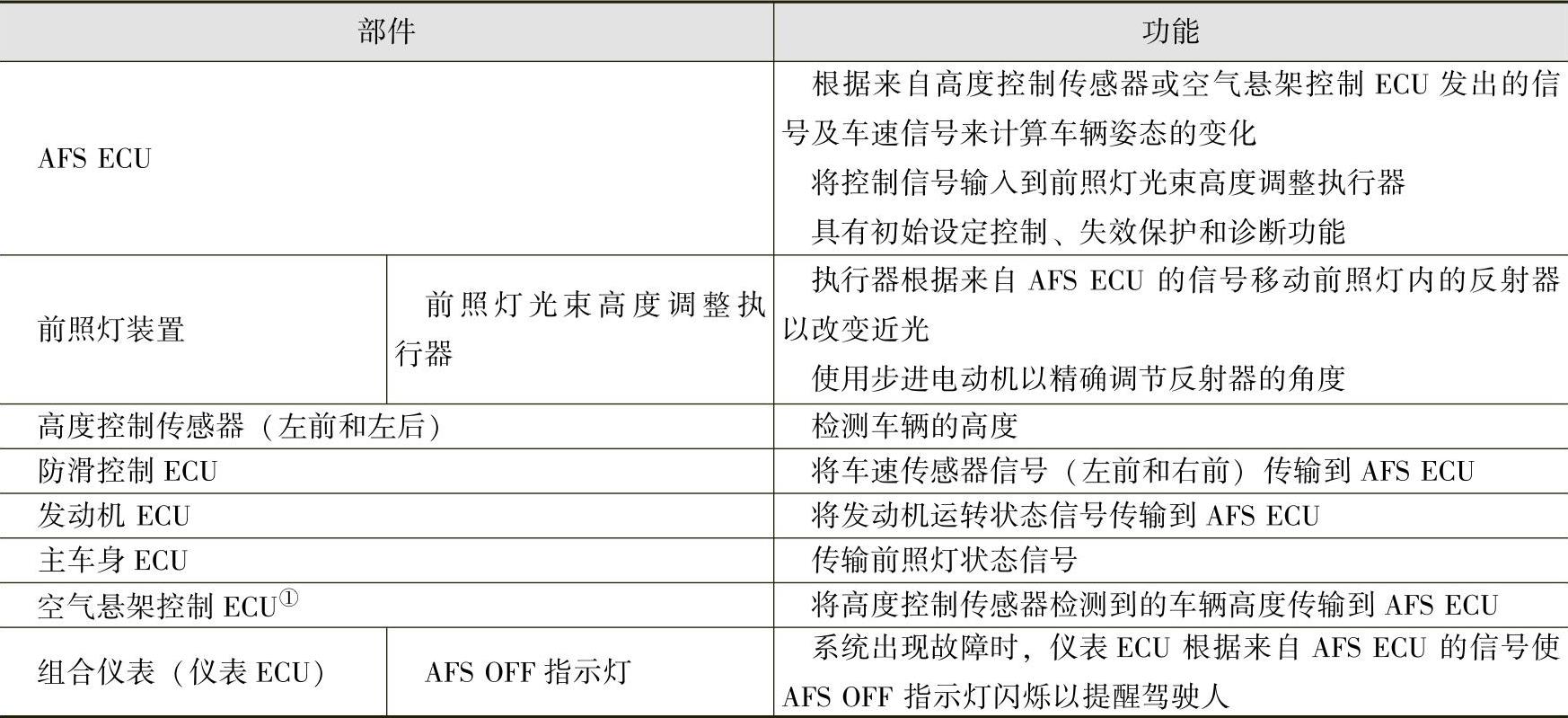
①仅限于带空气悬架系统的车型。
初始设定控制:起动发动机时,AFSECU驱动前照灯光束高度调整执行器,将前照灯反射器移至下限位置,然后使其移至合适位置。AFSECU由此可估算出前照灯的位置以进行相关控制。
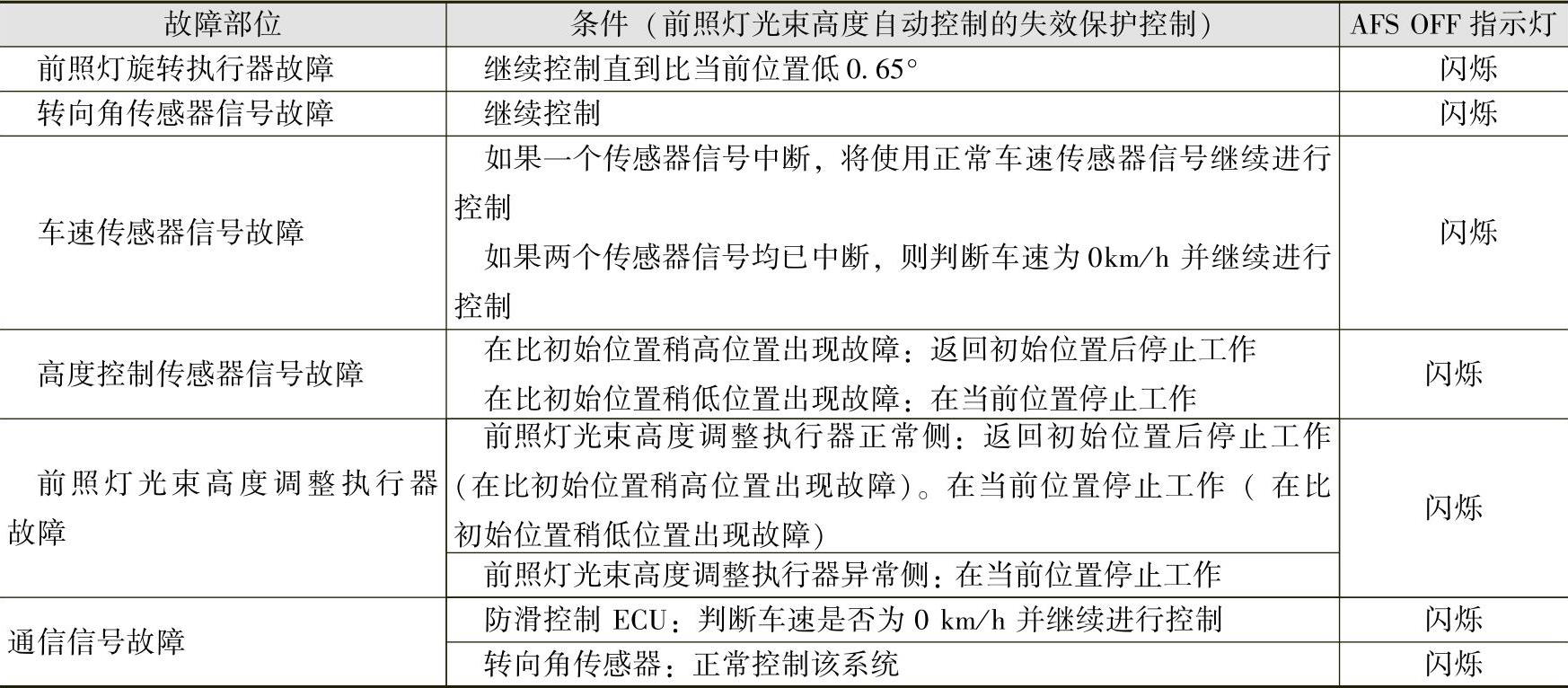
失效保护:如果AFSECU检测到前照灯光束高度自动控制系统或智能AFS出现故障,则将按表3⁃3所示采取相应措施。
表3⁃3前照灯光束高度自动控制系统的失效保护
6.智能AFS(智能型自适应前部照明系统)
在雷克萨斯LS460轿车上,有的车型配备了智能AFS,现介绍如下:
(1)概述 采用智能AFS(智能型自适应前部照明系统),当车辆转弯时,该系统将移动近光以增大近光的照明区域,实现最佳可见度。
新款LS460的智能AFS采用中-高速控制以及低速控制。中-高速控制时,此系统根据转向角和车速计算出目标照明角度并分别调节近光前照灯的旋转角度。低速控制时,系统根据转向角计算出目标照明角度并调节转弯方向内侧近光前照灯的旋转角度。
中-高速控制如图3⁃54所示。
低速控制如图3⁃55所示。
(2)系统图(图3⁃56) 此系统由两个前照灯装置(近光)、AFSECU、两个前照灯旋转执行器、转向角传感器和前速度传感器组成。此系统由AFSECU控制。
前照灯光束高度自动控制系统也由AFSECU控制。
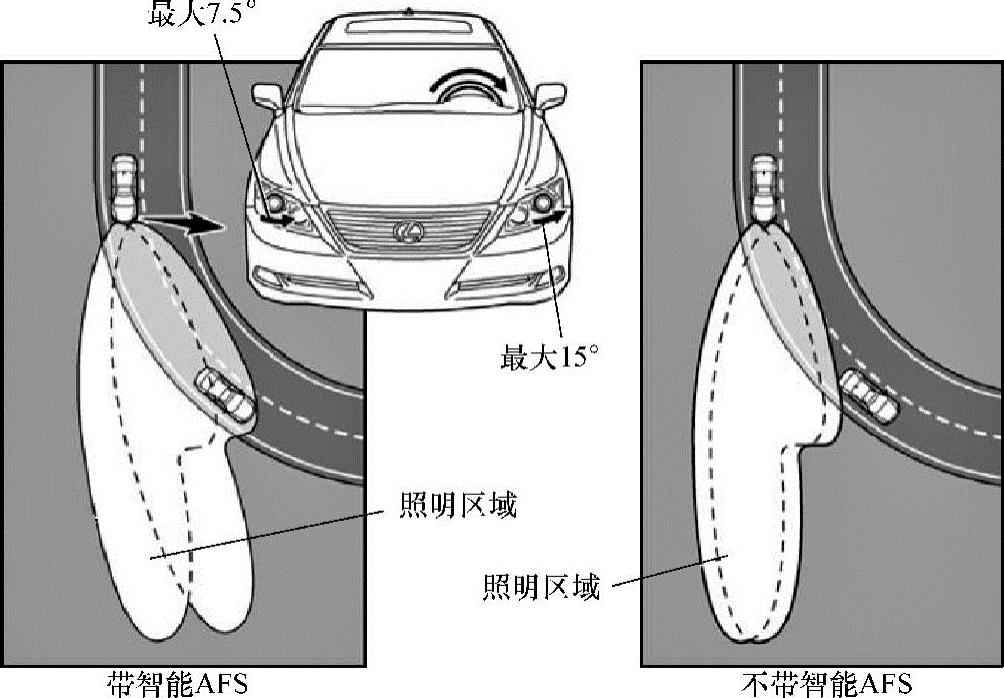
图3⁃54 雷克萨斯LS460轿车智能AFS系统的中-高速控制
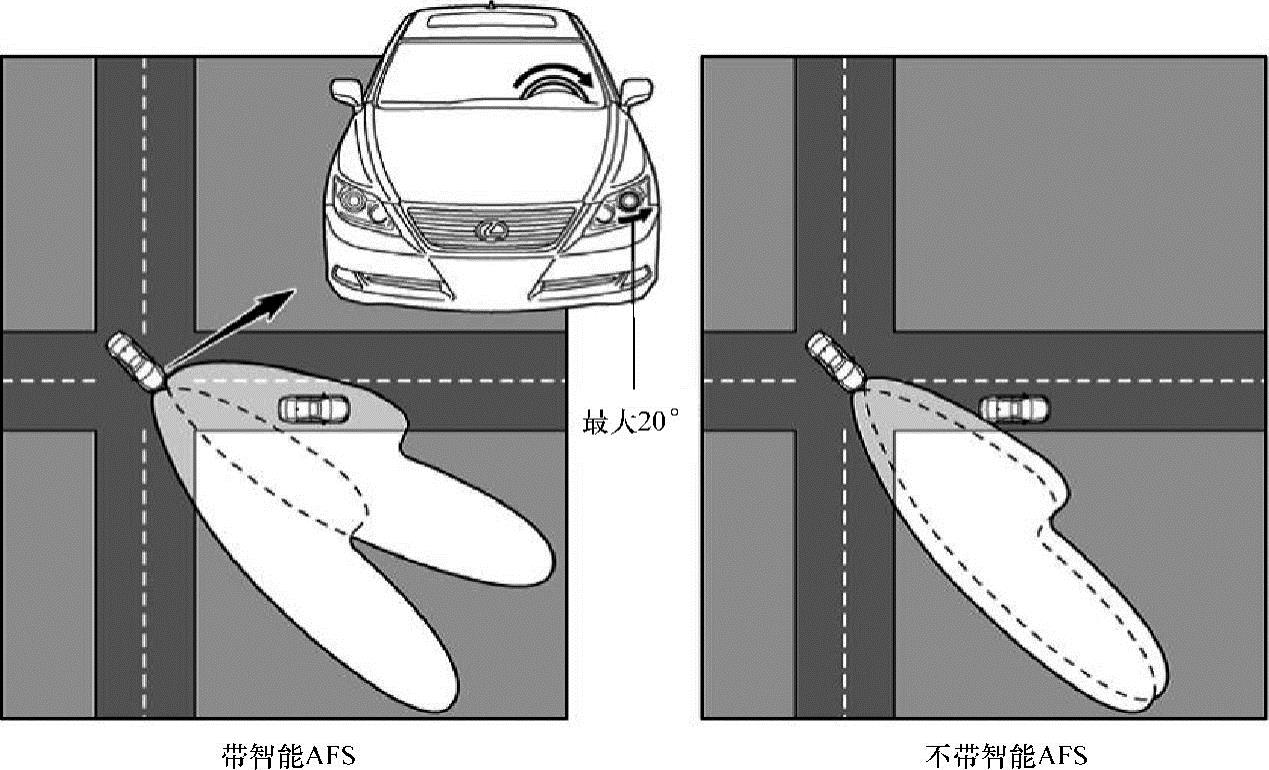
图3⁃55 雷克萨斯LS460轿车智能AFS系统的低速控制
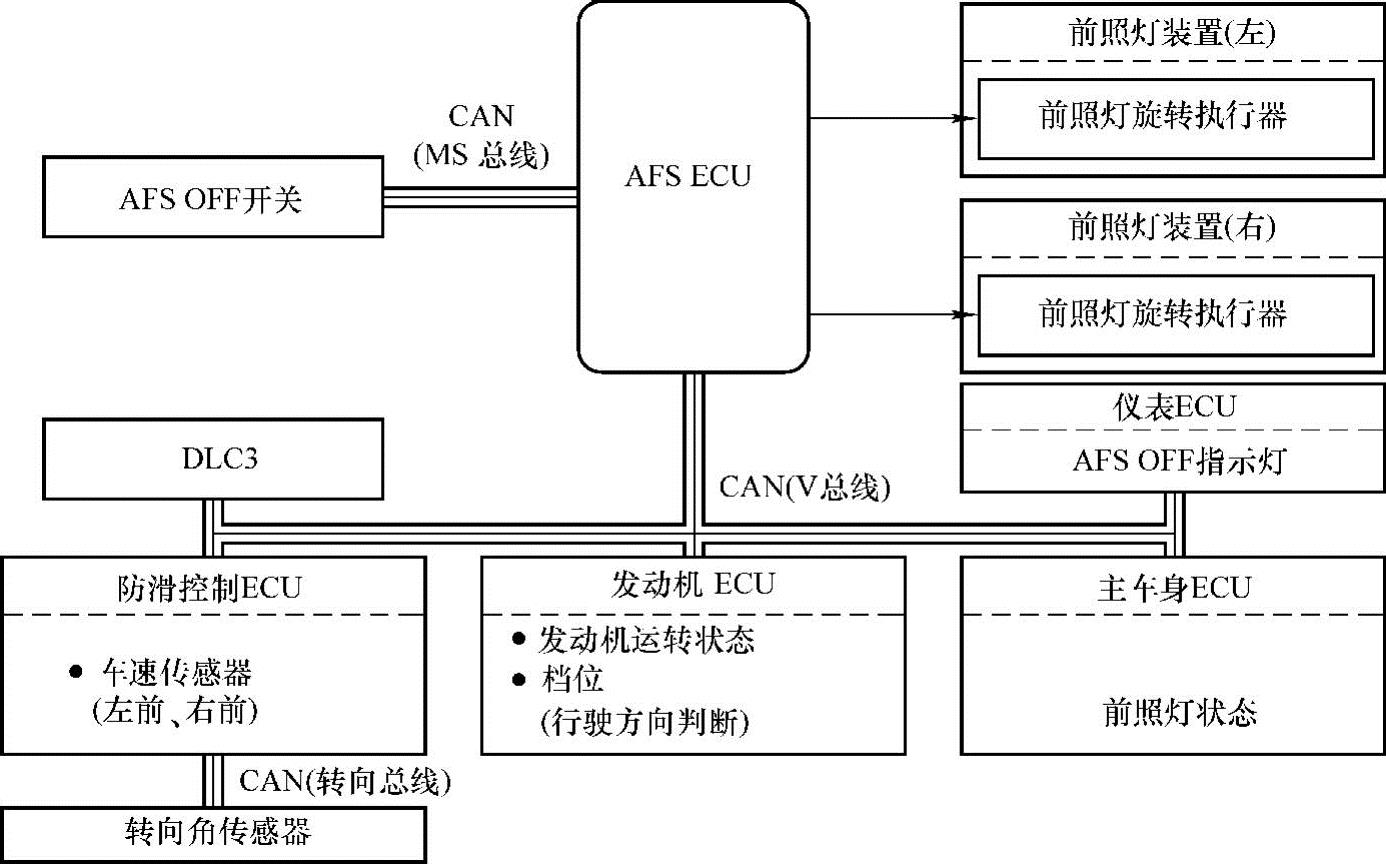
图3⁃56 雷克萨斯LS460轿车智能AFS系统框图
(3)主部件位置分布图 主部件位置分布如图3⁃57所示。
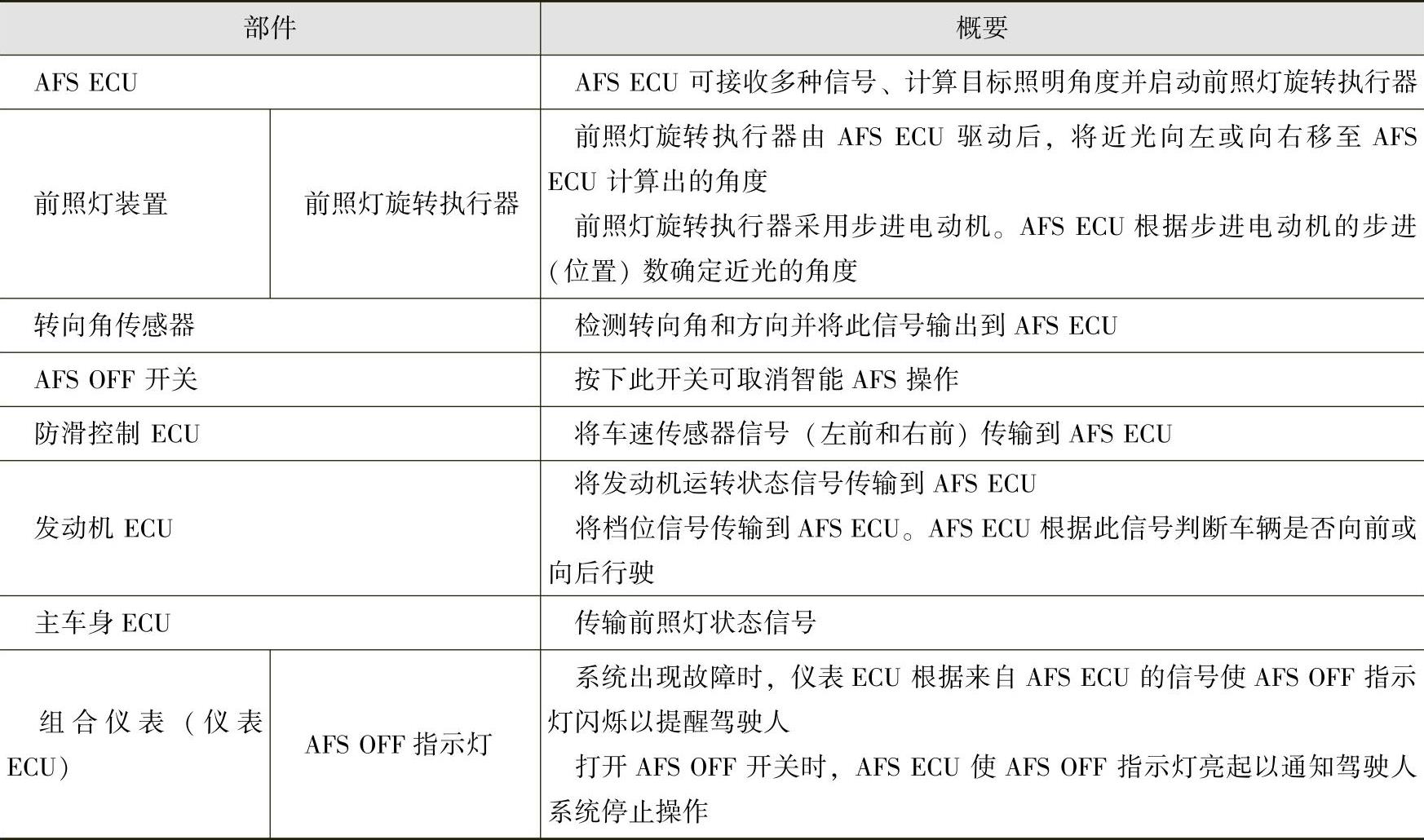
(4)主部件的功能(表3⁃4) 主部件的功能见表3⁃4。
(5)系统控制
1)概述。AFSECU根据接收到的转向角和车速信号来计算近光的目标照明角度。然后驱动前照灯旋转执行器以达到目标照明角度。通过前照灯旋转执行器内步进电动机的位置(步进数),可检测前照灯的工作角度。LS460L/460中,旋转角度控制根据转向角和车速在中-高速和低速之间进行转换。
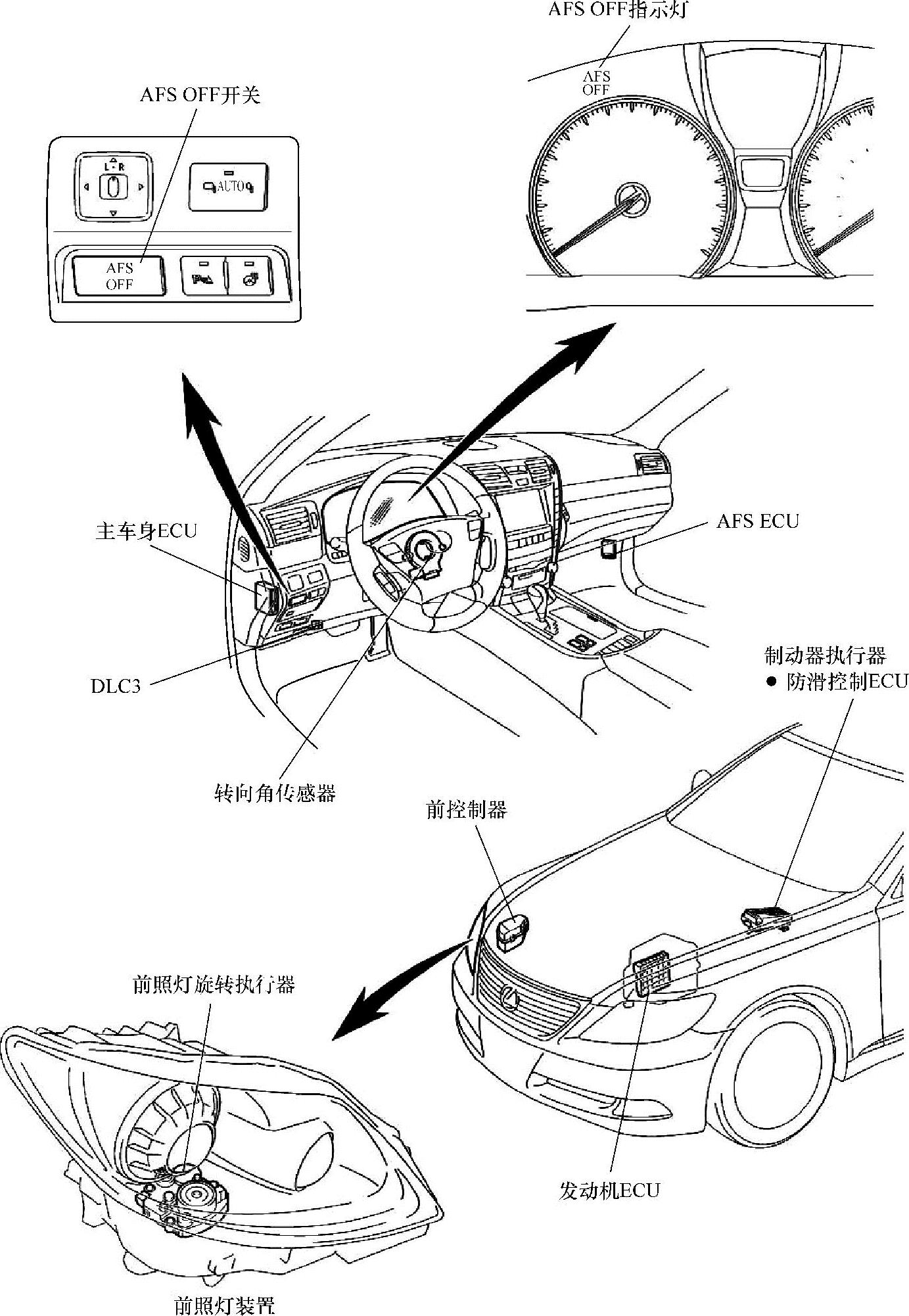
图3⁃57 雷克萨斯LS460轿车智能AFS系统主部件位置分布
2)低速控制。满足以下条件时,AFSECU进行低速控制:发动机处于工作状态;车辆以至少10km/h(6mile/h)的速度向前行驶;转向角不小于6°;前照灯近光处于照明状态(日间行车照明系统工作时除外);AFSON/OFF状态为ON。
车辆转弯时,AFSECU根据转向角计算旋转角度并驱动转弯内侧的前照灯旋转执行器以照亮前方道路。
表3⁃4雷克萨斯LS460智能AFS系统主部件的功能
低速控制旋转角度范围(用于左驾驶车型)见表3⁃5。
表3⁃5低速控制旋转角度范围(用于左驾驶车型)

3)中-高速控制。满足以下条件时,AFSECU进行中-高速控制:发动机处于工作状态;车辆以至少30km/h(19mile/h)的速度向前行驶;转向角不小于7.5°;前照灯近光处于照明状态(日间行车照明系统工作时除外);AFSON-OFF状态为ON。
AFS ECU可根据转向角和车速计算出近光前照灯的旋转角度,因此前照灯可照亮3s后车辆将要到达的位置。转弯时,AFSECU驱动两个前照灯旋转执行器以照亮前方道路。
中-高速控制旋转角度范围(用于左驾驶车型)见表3⁃6。
表3⁃6中-高速控制旋转角度范围(用于左驾驶车型)

4)初始设定控制。起动发动机时,AFSECU驱动前照灯旋转执行器,并将投射式前照灯向车辆中间位置转至极限,然后使其移至合适位置。AFSECU由此可估算出前照灯的位置以进行相关控制。
5)失效保护。如果AFSECU检测到智能AFS或前照灯光束高度自动控制系统出现故障,则将按表3⁃7所示采取相应措施。
表3⁃7雷克萨斯LS460智能AFS系统的失效保护
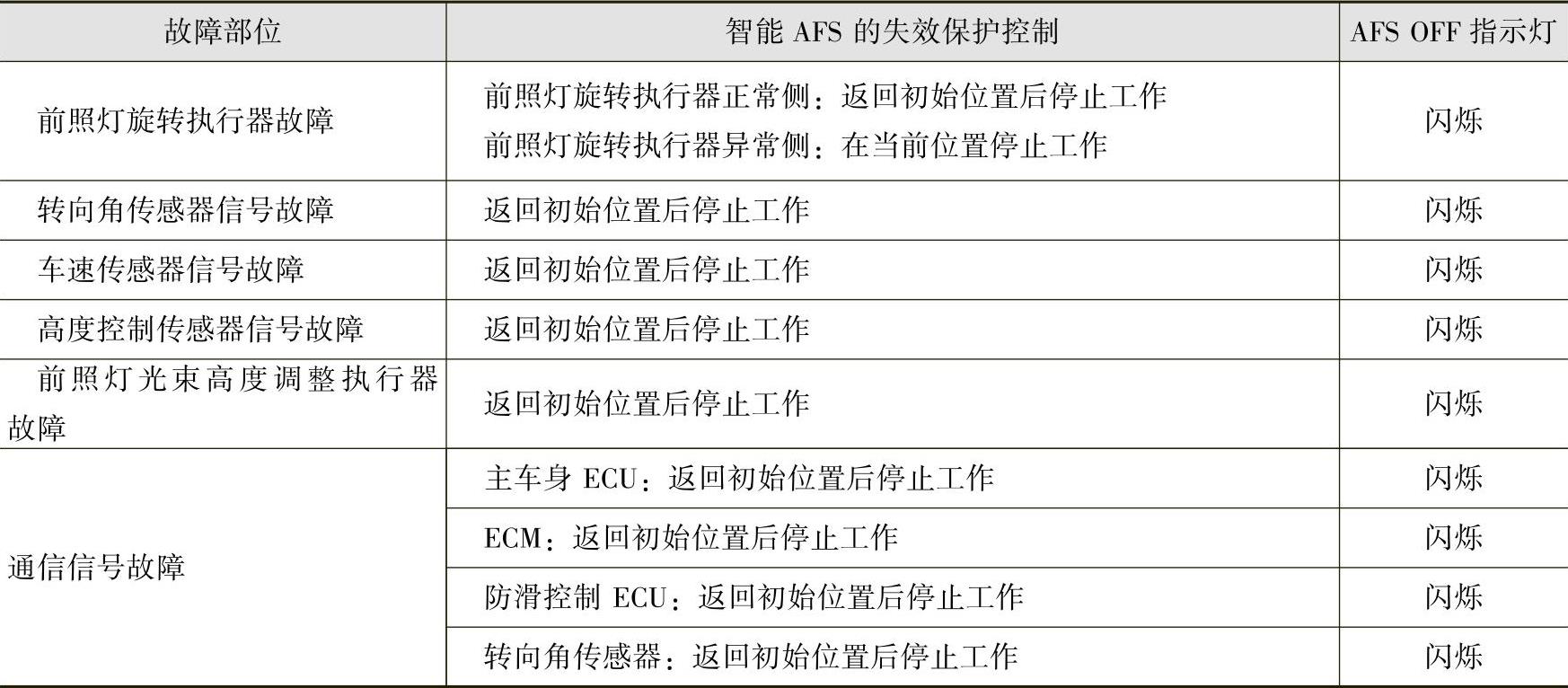
6)诊断。如果AFS ECU检测到智能AFS出现故障,则使AFS OFF指示灯闪烁以提醒驾驶人。同时,将诊断故障码(DTC)存储到存储器内。使用手持式检测仪可读取DTC。
相关文章

对公共照明电路进行检修时,我们将公共照明电路的检修分为两部分,第一部分是小区照明控制电路。图7-53 断开控制箱中的总断路器2.公路照明控制电路的检修方法当公路照明控制电路中出现故障时,应查看该照明系统的控制方式,如图7-54所示。公路照明控制电路由路灯控制器将供电电压转换为路灯所需的工作电压。若公路照明控制电路中的一盏照明灯不能正常点亮时,则应根据检修流程进行检查。......
2025-09-29

当室内照明电路出现故障时,可以通过故障现象,对整个照明电路进行分析,从而缩小故障范围,锁定故障的器件,并对其进行检修。在对室内照明电路进行检修前,应当了解室内照明电路的故障分析。图7-24所示为智能控制照明电路故障的检修流程。......
2025-09-29
当公共照明电路出现故障时,可以通过故障现象,对整个公共照明电路进行分析,从而缩小故障范围,锁定故障的器件,并对其进行检修。当主供电电路正常时,应当查看路灯控制器是否有故障。公路照明电路中常见的故障分为整个照明电路中的照明灯都无法点亮、一条支路上的照明灯无法点亮、一盏照明灯无法点亮等,应根据故障现象分别进行分析,提出具体的检修流程。图7-31 太阳能路灯的控制方式图7-32所示为公路照明控制电路故障的检修流程。......
2025-09-29

为了使汽车的电气设备工作,应按照它们各自的工作特性及相互间的内在联系,用导线和车体把电源、电路保护装置、控制器件及用电设备等装置连接起来,构成能使电流流通的路径,这种路径称为汽车电路。此外,汽车上通常用车体代替部分从用电器返回电源的导线。......
2025-09-30

室内照明电路依靠开关、电子元件等控制部件来控制照明灯具,进而完成对照明灯具数量、亮度、开关状态及时间的控制。只有熟悉室内照明电路中包含的元件,才能识读出室内照明电路的功能及工作过程。室内照明电路主要是由供电及保护电路、控制电路、照明灯等部分组成的。日光灯的初始状态图5-36所示为室内照明电路的初始状态。......
2025-09-29

图5-93L4发动机空调系统电气元件位置图5-94L4发动机空调系统电气元件位置图5-95V6发动机空调系统电气元件位置图5-96V6发动机空调系统电气元件位置图5-97V6发动机空调系统电气元件位置2.空调系统控制电路L4发动机空调系统控制电路如图5-98、图5-99所示,V6发动机空调系统控制电路如图5-100、图5-101所示。......
2025-09-30

为了阅读方便,现在多数汽车的电路原理图是按各个电路系统进行绘制的。进口汽车电路图的识读要点 进口汽车一般只配有接线图,其原理图往往是汽车进口以后有关人员为研究、使用与检修而收集和绘制的。学习提示随着车载网络技术在汽车上的应用,相应的电路也发生变化。由于汽车电气系统发生变化,因此在看图时要注意以上变化。在读图时,要注意先分析图中用电器的控制方式。......
2025-09-30
相关推荐