送丝机调速系统采用了PWM控制的DC-DC斩波电路,利用DSP进行PWM控制。图7-9 基于单片机和DSP控制的数字化弧焊电源系统结构框图3.基于双DSP控制的数字化弧焊电源图7-10所示是基于双DSP主从CPU结构控制的数字化弧焊电源系统结构框图。图7-10 基于双DSP控制的数字化弧焊电源系统结构框图DSP1是主控制器,负责相关外设的管理并协调两个DSP等;DSP2是从控制器,负责实现弧焊电源特性及参数的控制。......
2025-09-29
EtherCAT系统适合小数据量通信,系统实施成本低,在I/O级可以方便地实现与Internet的通信。使用EtherCAT技术,不需要接收以太网数据包,将其解码,之后再将过程数据复制到设备上去。EtherCAT采用主/从式构架。EtherCAT主设备由带有两个以太网端口的实时控制器构成。
采用主/从式构架的EtherCAT网络如图9-19所示。
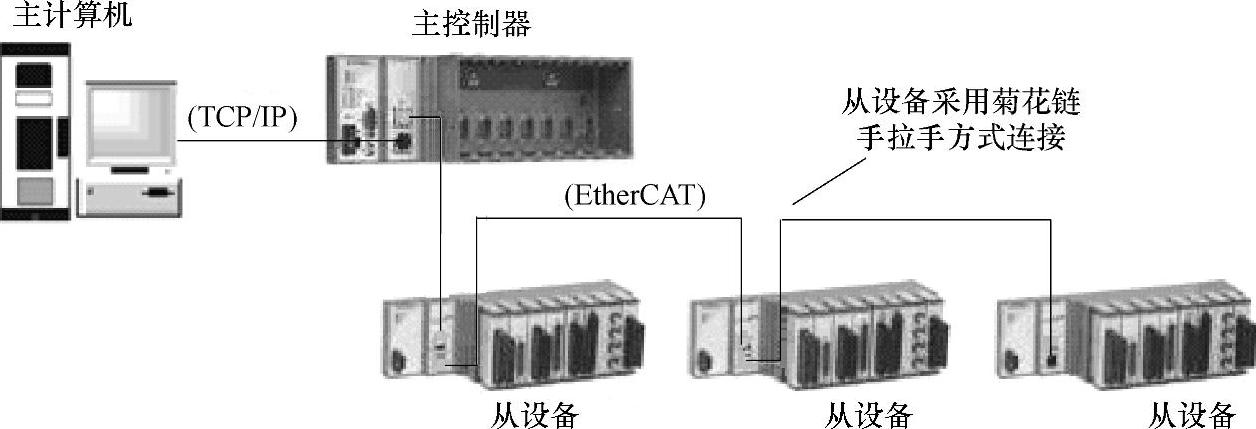
图9-19 EtherCAT采用主/从式构架
EtherCAT从站设备在报文经过该节点时,读取相应的编址数据,在报文经过设备节点时,将输入数据插入报文中。EtherCAT协议可以包括几个EtherCAT报文。从站之间的数据可以用广播方式和多播方式传输。
形象地描述EtherCAT应用系统中数据传输的过程。设想以太网的数据帧就像行驶中的火车,EtherCAT报文是每节火车车厢,需要传输和处理的数据是车厢内的乘客,数据可以被提取出来或插入到合适的从设备中。这辆动态的火车不停止地经过穿越所有从设备,在末端从设备处返回反向重新穿越所有从设备,如图9-20所示。(https://www.chuimin.cn)
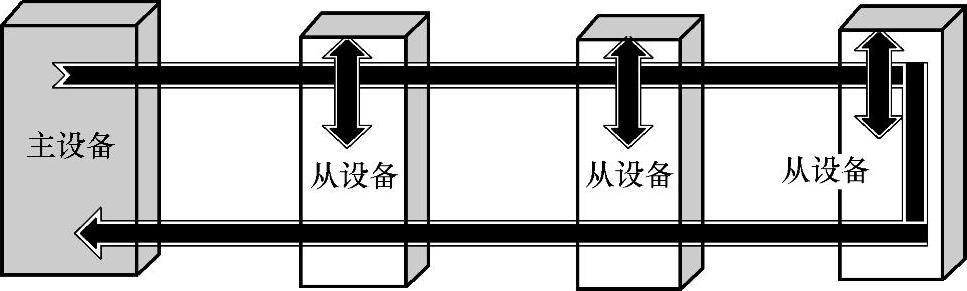
图9-20 EtherCAT数据传输
当第1台从设备收到主设备发出的以太网数据包后,自动开始将数据包发送到第2台从设备,这个处理过程对数据包的读写延迟仅为数纳秒。假设有K台从设备,对于非EtherCAT的网络,需要发送50个不同的数据包;而对于EtherCAT,只需发送一个的数据包,这个数据包包含所有从设备的数据。如果所有从设备需要接收相同的数据,那么只需要发送一个短数据包,所有从设备接收数据包的同一部分便可获得该数据,从而优化了数据传输速度及带宽。
在EtherCAT网络的主从式结构中,主站PC直接采用以太网网卡,如100Base-TX以太网网卡,可用专用模块作为从站。系统控制周期由主站发起,主站送发出下行电报,电报的最大数据量为1498B。下行电报依次通过所有的从站设备,从站对经过的数据帧进行分析,根据报文头中的命令读取数据或将要送出的数据写入到报文中。数据帧访问到网段上逻辑链路最后一个从站,该从站将经过处理的数据帧作为上行电报再发送给主站。主站收到这样一个上行电报后,处理返回数据,在网段上分布有从站设备的逻辑链路上所有从站和主站之间的一次通信过程结束。数据的传输采用移位同步的方法进行,即在网络的从设备中得到其相应地址数据的同时,数据帧可以传送到下一个从设备,相当于数据帧通过一个从设备时输出相应的数据后,马上转入下一个从设备。在网段的最后一个从设备节点处结束了整个数据传输的工作,形成了一个逻辑和物理环形结构。所有传输数据与以太网的协议相兼容,同时采用双工传输,提高了传输的效率。
相关文章

送丝机调速系统采用了PWM控制的DC-DC斩波电路,利用DSP进行PWM控制。图7-9 基于单片机和DSP控制的数字化弧焊电源系统结构框图3.基于双DSP控制的数字化弧焊电源图7-10所示是基于双DSP主从CPU结构控制的数字化弧焊电源系统结构框图。图7-10 基于双DSP控制的数字化弧焊电源系统结构框图DSP1是主控制器,负责相关外设的管理并协调两个DSP等;DSP2是从控制器,负责实现弧焊电源特性及参数的控制。......
2025-09-29

③MSC是无线移动通信系统与另一个移动通信系统的接口设备,也是无线移动通信系统与固定的地面公众网的接口设备。为有效支持移动通信业务,移动通信系统还需要针对无线资源、移动性、安全性等进行有效管理。不同的移动通信系统具有不同的无线资源组合。当移动用户离开登记注册的系统服务区进入其他系统服务区时,而获得通信的能力称为漫游。保证移动通信系统安全的技术措施包括鉴权和加密。......
2025-09-29

图1.30所示系统采用比例调节器,是有静差调速系统。电压反馈的极性与转速给定极性相反,因此是电压负反馈,电流反馈极性与给定极性相同,因此是正反馈。图1.31 电压负反馈电流正反馈控制直流调速系统稳态结构图将静特性[见式]与转速负反馈系统[见式]比较可以看出,电压反馈只是将电压环内电阻Rn造成的转速降减小了,而环外电阻Ra造成的转速降仍和开环调速时一样。......
2025-09-29
系统的结构如图2-1所示,各部分的工作原理如下:风力发电部分利用风力机将风能转换为机械能,再通过风力发电机将机械能转换为电能。同时还具有自动稳压功能,可改善系统的供电质量。当发电量不能满足负载需要时,控制器把蓄电池的电能送往负载,或将可逆式水泵水轮机的运行工况调整为水轮机工况进行发电供给负载,保证了整个系统工作的连续性和稳定性。图2-1风—光—抽蓄复合发电系统图2-1风—光—抽蓄复合发电系统......
2025-09-29

图4-2-21所示为典型的真空电子束焊机,主要包括主机、高压油箱、控制柜、真空系统及监控系统几个部分。图4-2-21 电子束焊机结构框图控制柜 内置高压电源控制、阴极加热电源控制、束流(栅偏压)控制、束流聚焦控制、束流偏转扫描控制以及真空控制元件和工件传动控制装置的电气控制等。电子枪结构 电子枪是电子束焊机的核心装置,有以下四个主要功能:1)阴极发射电子。......
2025-09-29

图910所示为凹模的简单冷却形式。当型芯特别小时,如图917所示,可采用铍铜合金作型芯材料加强冷却的方式。图915 导热杆式冷却方式6.冷却系统的零件对不同冷却系统,冷却装置有不同的零件,主要有以下几种。主要作用是连接并构造模外冷却回路。图916 导热杆局部冷却方式1—铍铜管 2—导管图917 导热型芯式冷却方式1—铍铜型芯 2—导管7)隔片。用在导热式冷却系统上,主要由铍铜制成。......
2025-09-29


相关推荐