主控站根据各监测站观测到的数据推算和编制卫星星历、钟差、导航电文和执行其他控制指令,通过监控站注入到相应卫星的存储系统。接收机的主要功能是接收卫星播发的信号并利用本身的伪随机噪声码取得观测量以及内含卫星位置和钟差改正信息的导航电文,然后计算出接收机所在的位置。......
2023-08-27
由于电磁波在空间的传播速度已被精确地测定了,所以可以利用测定电磁波传播时间的方法,间接求得两点之间的距离,光电测距仪正是利用这一原理来测量距离的。但用光电测距仪是测定由安置在测线一端的仪器所发射的光,经安置在另一端的反光棱镜反射回来所经历的时间来求算距离的。而GPS接收机则是测量电磁波从卫星上传播到地面的单程时间来计算距离,即前者是往返测,后者是单程测。由于卫星钟和接收机钟不可能精确同步,所以用GPS测出的传播时间中含有同步误差,由此算出的距离并不是真实的距离,观测中把含有时间同步误差所计算的距离称为“伪距”。
为了提高GPS的定位精度,有绝对定位和相对定位两种,现分述如下。
(1)绝对定位原理 是用一台接收机,将捕获到的卫星信号和导航电文加以解算,求得接收机天线相对于WGS-84坐标系原点(地球质心)绝对坐标的一种定位方法。广泛用于导航和大地测量中的单点定位。
由于单程测定时间只能测量到伪距,所以必须加以改正。对于卫星的钟差,可以利用导航电文中所给出的有关钟差参数加以修正,而接收机中的钟差一般很难预先确定,所以通常把它作为一个未知参数,与观测站的坐标在数据处理中一并求解。
求算测站点坐标实质上是空间距离的后方交会。在一个观测站上,原则上须有三个独立的观测距离才可以算出测站的坐标,这时观测站应位于以3颗卫星为球心,相应距离为半径的球面与地面交线的交点上。因此,接收机对这3颗卫星的点位坐标分量再加上钟差参数,共有4个未知数,所以至少需要4个同步伪距观测值。也就是说,至少必须同时观测4颗卫星,如图1-35所示。
在绝对定位中,根据用户接收机天线所处的状态,又可分为动态绝对定位和静态绝对定位。当接收机安装在运动载体(如车、船、飞机等)上,求出载体的瞬时位置称为动态绝对定位。若接收机固定在某一地点处于静止状态,通过对GPS卫星的观测确定其位置称为静态绝对定位。在公路勘测中,主要是使用静态定位方法。

图1-35 绝对定位原理
关于用伪距法定位观测方程的解算均已包含在GPS接收设备的软件中,这里不再论述。
(2)相对定位原理 由于受到各种因素的影响,使用一台GPS接收机进行绝对定位其定位精度很低,一般静态绝对定位只能精确到米,动态绝对定位只能精确到10~30m。这一精度是远远达不到工程测量要求的。所以工程中广泛使用的是相对定位。
相对定位的基本情况是两台GPS接收机分别安置在基线的两端同步观测相同的卫星,以确定基线端点在坐标系的相对位置或基线向量,如图1-36所示。当然,也可以使用多台接收机分别安置在若干条基线的端点,通过同步观测以确定各条基线的向量数据。相对定位对于中等长度的基线,其精度可达10-7~10-6。相对定位也可按用户接收机在测量过程中所处的状态分为静态定位和动态定位两种。
1)静态相对定位。由于接收机固定不动,可以有充分的时间通过重复观测取得多余观测数据,加之多台仪器同时观测,很多具有相关性的误差,利用差分技术都能消去或削弱这些系统误差对观测结果的影响,所以,静态相对定位的精度是很高的,在公路、桥隧控制测量工作中均用此法。在实施过程中,为缩短观测时间,采用一种快速相对定位模式,即用一台接收机固定在参考站上,以确定载波的初始整周待定值,而另一初始接收机在其周围的观测站流动,并在每一流动站上静止地与参考站上的接收机进行同步观测,以测量流动站与固定站之间的相对位置。这种观测方式可以将每一站上的观测时间由数小时缩短为几分钟,而精度并不降低。
2)动态相对定位。是将一台接收机设在参考点上不动,另一台接收机安置在运动的载体上,两台接收机同步观测GPS卫星,从而确定流动点与参考点之间的相对位置,如图1-37所示。
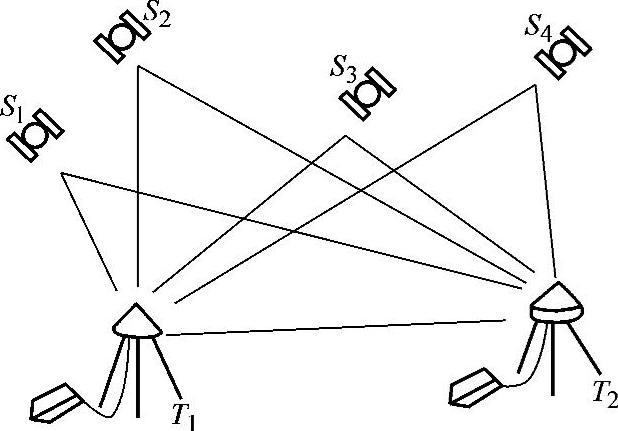
图1-36 静态相对定位

图1-37 动态相对定位
动态相对定位的数据处理有两种方式,一种是实时处理,一种是测后处理。前者的观测数据无需存储,但难以发现,精度较低;后者的精度,在基线长度为数公里的情况下,精度约为1~2cm,较为常用。
有关测量员的文章

主控站根据各监测站观测到的数据推算和编制卫星星历、钟差、导航电文和执行其他控制指令,通过监控站注入到相应卫星的存储系统。接收机的主要功能是接收卫星播发的信号并利用本身的伪随机噪声码取得观测量以及内含卫星位置和钟差改正信息的导航电文,然后计算出接收机所在的位置。......
2023-08-27

在1.1节的基本概念里,已经了解了电极是指金属与电解液组成的体系,即电子导体和离子导体组成的体系。然而,绝对电极电位无法测量,必须借助于参比电极与该电极组成原电池,才能通过仪器测量原电池的电动势来得到。......
2023-06-23

把振动信号输入电压表,根据电压值和测量系统的电压灵敏度的大小,计算出振幅。把已记录或显示的振动波形的幅值,乘以响应的灵敏度,计算出振幅。用百分表或千分表固定在不动的参考点上作直接测量,可得位移振幅的峰值。激振力可用压电式或电阻式测力传感器测量,也可通过测量振动体的加速度并加以换算间接测量。随机振动的测量系统框图见图7-18。......
2023-08-20

为此,在A、B点上各竖立一根水准尺,并在其间安置水准仪,根据水准仪提供的水平视线,分别在A、B点的水准尺上读取读数a、b,则A、B两点的高差为hAB=a-b (8-1)图8-1 水准测量原理在水准测量中,我们是以工作进行方向来区分前视和后视的。即图8-2 分段测量B点高程为在水准测量中,A、B之间的临时立尺点仅起传递高程的作用,这些点称为转点,常以TP表示,如图8-2中的TP1、TP2…......
2023-08-20
图8-5磁化曲线测量原理图[1]冲击测量法还可用于测量材料的磁化曲线和磁滞回线。测量时选用环形样品以避免退磁场对磁化的影响。磁化线圈W1的匝数较多,与直流电源相连接,用于产生较强的磁场;测量线圈W2匝数较少,与冲击检流计相串联,用于产生感应电势,形成一个测量回路。如前所述,磁感应强度B可表述为式中,N为测量线圈W2的匝数;S为样品的截面积;Cμ为测量回路的冲击常数;αm为冲击检流计灯尺上的最大偏格数。......
2023-06-20
压力测量的仪表种类很多,常用的有:U型管压力计、倾斜式微压计和弹性压力计等。总之,发现此种现象时,应及时查明原因,排除故障后再进行测量。为了实现辊道窑合理而稳定的温度制度和气氛制度,确保辊道窑正常运转,必须对全窑压力进行测量。一般弹簧管压力计的测压范围为-105~109Pa。气体压力测量装置还有单管式压力计、环称压差计等。......
2023-10-11

电子计数器测频是严格按照频率的定义进行的。若计数器计数值为N,则被测信号的频率测量的原理框图如图5-40所示,频率为fx的被测信号,由A通道输入,经放大整形后输往闸门(主门)。T0通常设计为10n s,配合显示屏上小数点的自动定位,可直接读出测量结果。......
2023-06-22

传感器的分类方法很多,但常用的分类方法有两种:一种是按测量对象分类,如温度传感器、湿度传感器、力传感器、位移传感器、速度传感器等;另一种是按传感器的工作原理分类,如热电式传感器、电容式传感器、压电式传感器、磁电式传感器等。结构性传感器因被测参数的变化引起传感器的结构变化,导致输出电量的变化,它是利用物理学中的场定律和运动定律等构成,如电容式传感器、电感式传感器。......
2023-06-22
相关推荐