常用的偏心件是偏心轮或偏心轴,图5-31所示为偏心夹紧装置的应用实例。偏心轮的参数已经标准化,具体设计时,有关参数可查阅夹具设计手册。如图5-34所示的几种常见的快速螺旋夹紧装置可以克服这一缺点。在夹紧装置中,结构形式变化最多的是螺旋压板装置。......
2023-06-29
减振装置大体上分为以下四类:①利用减振装置对振动系统的阻尼,消耗振动能量的阻尼减振器,简称阻振器。②利用装置中相对运动的元件间的摩擦力对振动系统做功,消耗振动能量的摩擦减振器。③利用装置中辅助质量的动力对减振系统做功,消耗振动能量的动力减振器。④利用装置中的自由质量反复冲击振动体,消耗振动能量的冲击减振器。
在设计、使用减振器时,不仅要考虑其减振效果,而且要考虑体积、重量、结构、使用维护,以及经济成本等各方面的因素。
(1)阻振器 阻振器与振动体相连接,直接增加系统的阻尼,把动能变为热能而起减振作用。每振动周期内消耗的能量越大,减振效果越好。可采取以下措施提高减振效果:①提高阻振器的阻尼力。②把阻振器安装在与振动体相对运动最大的位置。③阻振器的结构尺寸应具有足够的散热能力。
(2)固体摩擦减振器
典型的固体摩擦减振器结构见图7-7。由于飞轮4有较大的惯性不能随同轴系一起振动,飞轮4与毂盘1之间产生相对运动,以及伴随的摩擦力矩,从而把振动能量转换成热能,起到减振作用。减振效果主要与飞轮的转动惯量和摩擦力矩的大小有关。在设计和使用时,应根据激振力矩和允许振幅的大小,选取飞轮的最佳转动惯量和最佳摩擦力矩。若作用在扭振系统上的激振力矩为Mjsinωt,安装减振器的允许振幅为[θ],则按以下步骤计算减振器的各项参数。
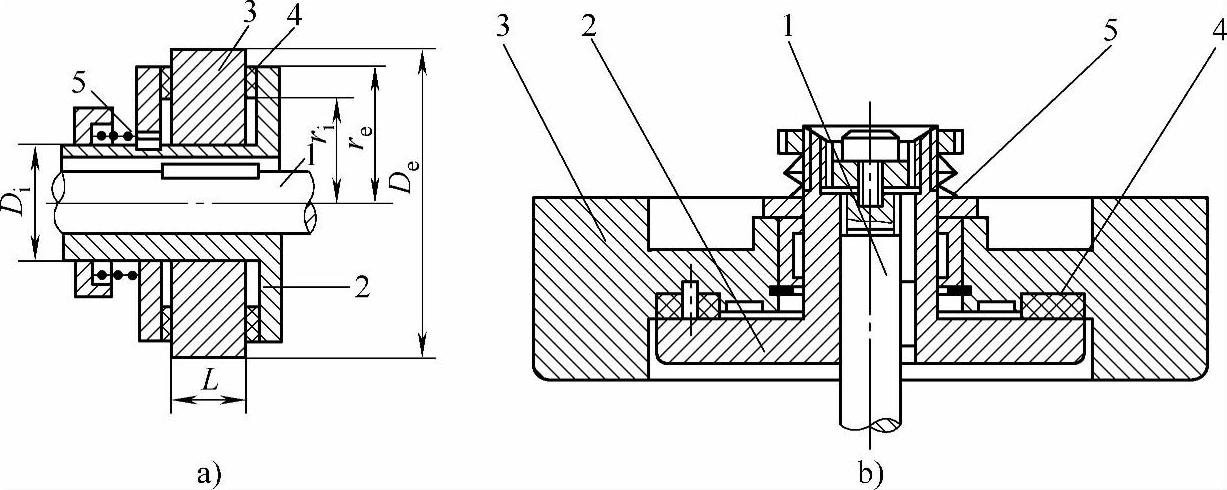
图7-7 固体摩擦减振器结构
1—毂盘 2—扭振轴 3—摩擦盘 4—飞轮 5—弹簧
1)计算飞轮的最佳转动惯量为

2)确定飞轮的几何尺寸。

先根据减振器的安装位置的要求,选取 ,
, ;再根据飞轮材料的密度γ,及式(7-15)算出的I,按式(7-16)确定飞轮尺寸。
;再根据飞轮材料的密度γ,及式(7-15)算出的I,按式(7-16)确定飞轮尺寸。
3)计算最佳摩擦力矩为
Mop=1.1Mj (7-17)
4)确定摩擦盘的尺寸和材料,计算最佳弹簧压力为

先根据结构要求及飞轮的尺寸,选取摩擦盘尺寸re、ri;由选取的摩擦盘材料确定摩擦因数μ;再按式(7-18)计算pop,根据pop确定弹簧的尺寸,要求实际的弹簧压力在pop的±33%以内。
5)计算每一振动周期中减振器消耗的功最大值Wmax及功率Pmax:

式中,W为每振动周期消耗的功,用以确定减振器的减振效果;P为消耗的功率,用以校验其散热能力。
6)校核对其他激振力矩Mj′的减振效果。

θ′应小于允许振幅[θ],才能满足设计要求。若达不到此要求,需改进设计。
(3)动力减振器
1)动力减振器的工作原理。图7-8示出动力减振器的两个应用实例及其动力学模型。图中m1和k1分别为主振系统简化后的等效质量和刚度,m2、k2和c2分别为动力减振器的质量(简称辅助质量)、刚度和阻尼系数。
当主振系统振动时,附加的动力减振器系统也随着振动。利用减振器的动力作用,使其加到主系统上的力(或力矩)与激振力(或力矩)的方向相反,大小相近,以致作用在主系统上的力(或力矩)互相抵消,达到抑制主系统振动的目的。
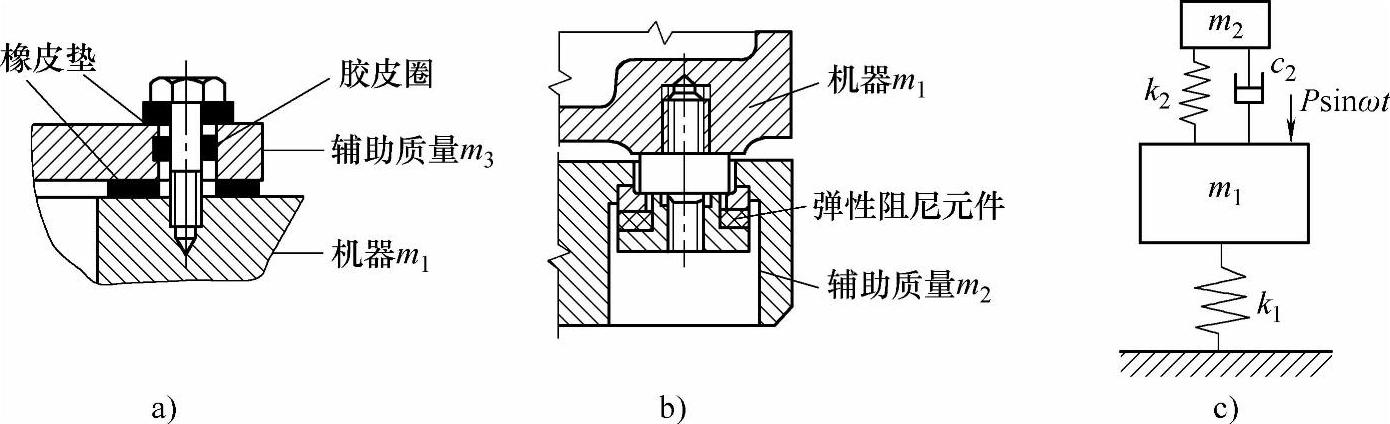
图7-8 有阻尼动力减振器的示意图及其动力学模型
a)、b)动力减振器的应用 c)动力学模型
动力减振器视辅助质量加到主系统上的方式不同,有下列类型:①辅助质量与主质量之间既有弹性元件又有阻尼元件的有阻尼动力减振器。②辅助质量与主质量之间只有弹性元件的无阻尼动力减振器。③辅助质量与主质量之间只有阻尼元件的摩擦减振器。④辅助质量与主质量之间没有元件相联,只是辅助质量可以在主质量上能产生摆动的摆动式减振器。
从图7-8中的动力学模型看出,在主系统上附加了减振器,单自由度系统变为二自由度系统,根据其运动方程,可求得主质量和辅助质量的振幅相对静变位的比值。

式中A1、A2为主质量、辅助质量的振幅;δst为主系统在与激振力幅P相等的静力作用下产生的静变位, ;α为减振器与主系统固有频率之比,
;α为减振器与主系统固有频率之比, ;ωn1为主系统的固有频率,
;ωn1为主系统的固有频率, ;ωn2为减振器的固有频率,
;ωn2为减振器的固有频率, ;λ为激振频率与主系统固有频率之比,
;λ为激振频率与主系统固有频率之比, ;μ为辅助质量与主质量之比,
;μ为辅助质量与主质量之比, ;ζ为减振器的阻尼比,ζ2=
;ζ为减振器的阻尼比,ζ2= 。
。
式(7-22a)中,A1/δst与λ的关系曲线见图7-9。利用以上关系,即可求出减振器的各参数。

图7-9 A1/δst与λ的关系曲线
2)无阻尼动力减振器。对于无阻尼动力减振器,没有阻尼元件,则ζ2=0,式(7-22)变为
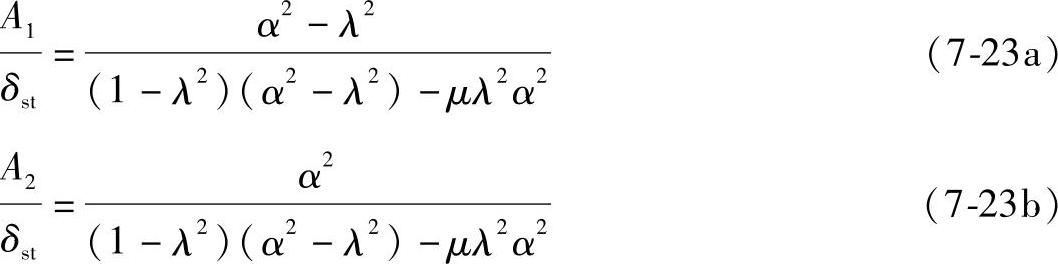
从式(7-23a)看出,当α=λ时,A1=0,即主振系统的振幅为零,起到减振作用。在设计无阻尼动力减振器时,应综合考虑以下问题来解决其参数。
①减振器应消除主振系统的共振振幅,即令减振器的固有频率ωn2,等于主振系统的固有频率ωn1,此时式(7-23)中的α=1。为使A1=0,则α=λ=1。
②扩大减振器的减振频带。由图7-9中虚线看出,按上面计算出的减振器,即λ=1,虽消除了主振系统的共振振幅,但在原共振点附近的λ1和λ2处又出现了两个新的共振点。一旦激振频率ω偏离减振器的固有频率ωn2,主系统的振幅A1不等于零,甚至产生共振。为此,要注意扩大减振频带。λ1和λ2为
可见,λ1和λ2只与质量比μ有关,它们之间的关系曲线见图7-10。
为了使主系统能够安全运转在远离新共振点范围内,要求这两个临界频率相距较远。一般要求μ>0.1。对于激振频率稳定的振源,例如定速运转机械,μ可取小些。若主系统上还作用有其他不同频率的激振力,还需校核这些激振力是否会在新的共振点处发生共振。
③使减振器振幅A2能满足结构要求,由式(7-23b)看出,若α=1,可能导致A2过大,使辅助质量m2在减振器内的活动空间不够。为此,应调整m2与k2的比例,并相应的增加m2。
由以上介绍可知,无阻尼动力减振器结构简单、元件少、减振效果好;但会出现新的共振点,减振频率范围窄,适用于激振频率变化不大的情况。

图7-10 λ1、λ2与μ的关系曲线
3)有阻尼动力减振器。这是在动力减振器中加入适当的阻尼,除动力作用外,还利用阻尼消耗振动能量。这样减振效果更好,而且还使频带加宽,具有更广的适用范围。有阻尼动力减振器与主系统的相对振幅A1/δst的数学表达式见式(7-22a),与此相应的A1/δst随λ的变化曲线,见图7-11。由图可以看出,不同阻尼比ζ的所有曲线都经过P、Q两点,因此,这两点的位置与阻尼无关。在设计有阻尼动力减振器时,应特别注意以下两个问题。
①保证减振器在整个频率范围内都有较好的减振效果。为此,应使P、Q两点的纵坐标相等,而且成为幅频响应曲线的最高点,见图7-11。按式(7-25)选择最佳阻尼比,按式(7-26)选择最佳频率比,即可达到要求。

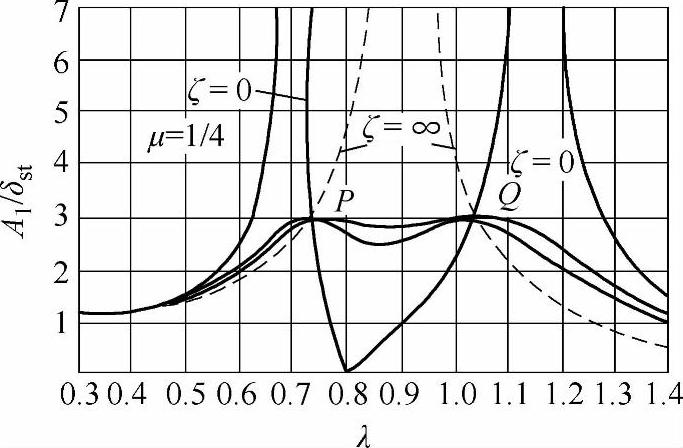
图7-11 最佳参数情况下A1/δst与λ的关系曲线
②保证减振效果达到预定要求,应使最佳参数情况下P、Q两点的纵坐标小到允许振幅之内。最佳参数情况下P、Q两点的纵横坐标的表达式为

由式(7-28)可以看出,增加质量比μ,主系统的振幅A1将减小,减振效果提高,但会导致系统的重量增加。因此,应注意把主系统中的某些部件作为辅助质量,既提高减振效果,又不增加系统的质量。
4)主振系统的阻尼对动力减振效果的影响。在阻尼比 不可忽略的主振系统上安装有阻尼动力减振器,其动力学模型见图7-12。根据其运动方程,仍可推出与式(7-22)相似的A1/δst的数学表达式。但绘制出A1/δst与λ的关系曲线,不再有图7-11所示的公共点P、Q。因此,根据这些曲线族的两个峰值推导出的最佳参数αop、ζop的解析式过于复杂,没有实用价值。一般用数值分析式确定αop和ζop。表7-1列出若干组质量比μ和阻尼比ζ1的原始条件下,有阻尼动力减振器的最佳频率比αop、最佳阻尼比ζop及相应的最佳振幅AA1δst。。
不可忽略的主振系统上安装有阻尼动力减振器,其动力学模型见图7-12。根据其运动方程,仍可推出与式(7-22)相似的A1/δst的数学表达式。但绘制出A1/δst与λ的关系曲线,不再有图7-11所示的公共点P、Q。因此,根据这些曲线族的两个峰值推导出的最佳参数αop、ζop的解析式过于复杂,没有实用价值。一般用数值分析式确定αop和ζop。表7-1列出若干组质量比μ和阻尼比ζ1的原始条件下,有阻尼动力减振器的最佳频率比αop、最佳阻尼比ζop及相应的最佳振幅AA1δst。。
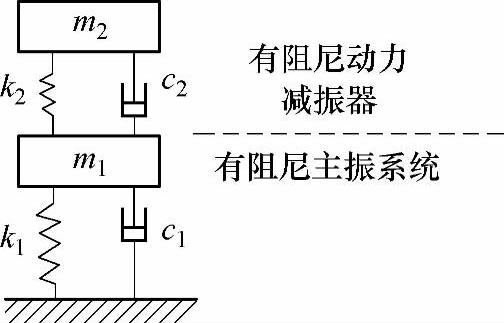
图7-12 有阻尼动力减振器动力学模型
表7-1 有阻尼动力减振器(主振系统有粘性阻尼)的最佳参数

(续)

5)随机振动的动力减振器。随机激振具有连续频谱密度函数,即激振频率含有各种成分,包括主振系统固有频率。为了提高减振效果,应将动力减振器的固有频率选择在主振系统固有频率附近。按此原理推导出来动力减振器的最佳频率比αop和最佳阻尼比ζop如下:

与αop、ζop相对应的主质量最小位移方差为

式中,μ为质量比;S0为随机激振的频谱密度;ωn1为主振系统的固有频率;k1为主振系统刚度。
有关建筑及空调风机的工程设计、使用与维修的文章

常用的偏心件是偏心轮或偏心轴,图5-31所示为偏心夹紧装置的应用实例。偏心轮的参数已经标准化,具体设计时,有关参数可查阅夹具设计手册。如图5-34所示的几种常见的快速螺旋夹紧装置可以克服这一缺点。在夹紧装置中,结构形式变化最多的是螺旋压板装置。......
2023-06-29

图9-11 进气风室试验装置示意图(一)1—辅助风机 2—连接管 3—均流网 4、6—压力计 5—喷嘴 7—试验风机2)出气风室试验装置示意图见图9-14和图9-15。进气风室的横截面是风机进口喉部面积的5倍;试验风机为离心风机时,出气风室的横截面至少应是风机出口或出风管面积的9倍;试验风机为轴流风机时,出气风室的横截面至少应是风机出口或出风管面积的16倍。如果采用风室内多喷嘴测定流量,还应考虑以下问题:喷嘴空间布置。......
2023-08-20

轴向紧固装置种类很多,一般根据轴承类型、轴向载荷大小、转速的高低以及在轴上的位置和装拆条件等决定。轴向载荷较大时轴承内圈一般多采用锁紧螺母、止动垫圈紧固;轴承外圈多采用端盖、螺纹环紧固。当轴向载荷较小和转速较低时,轴承内圈多采用轴用弹性挡圈、紧定套、退卸套等紧固;轴承外圈多采用孔用弹性挡圈、止动环等紧固。下面介绍一般常采用的紧固装置。适用于转速不高、轴向载荷不大的光轴。......
2023-06-26
HFFX6900QG型双燃料公交车装备CA6102N2型发动机,该车型采用阿根廷生产的文丘里式燃气混合器。图2-32 阿根廷产文丘里式燃气混合器的3种规格稳压器①稳压器的作用。而玉柴天然气发动机最高使用压力为1.38MPa,超过该压力可能导致调压器失效、发动机无法起动、游车、催化器烧结等故障。因此,需要在汽化器和低压电磁阀之间安装一个稳压装置,通过稳压器的减压作用,使压力降低至稳压器的设定范围,以保证进入发动机的天然气压力符合使用要求。......
2023-08-30
根据增压值的大小,离心风机可分为以下三类:①低压风机。混流风机的性能介于离心式与轴流式之间。按照动叶片的调节方式,混流风机可分为动叶不可调节、动叶半调节及动叶全调节等三种型式。回转式风机主要有罗茨鼓风机及压缩机等类型。图4-3所示为罗茨鼓风机。目前定型生产的各种类型风机的使用范围是相当广泛的。其中叶片风机中的离心种类的风机,工作区间最广,产品种类、型号、规格也最多。......
2023-08-20

1)油润滑润滑方式及装置润滑油的润滑方法有间歇供油和连续供油两种。浸油润滑和飞溅润滑如图1.28 所示,将零件的一部分浸入油中,利用零件的转动,把油带到摩擦部位使零件进行润滑的方式,称为浸油润滑。图1.27油环润滑图1.28浸油润滑压力润滑用外接设备将润滑油以一定的压力送到摩擦部位润滑的方式,称为压力润滑。......
2023-06-24

根据工作情况的不同,有的通风机只有进口管网,有的通风机只有出口管网。如果把工作场所当作管网的一部分,一并计算其静阻力,则式(6-2)中Δpg一项不存在,于是该式所表示的管网特性即为狭义的管网特性。K值表征了管网的特性,称为“管网特性系数”。今后除特殊指明外,提到的管网及管网特性都是指狭义的管网及管网特性。有了R与qV的对应关系,就可按照上述过程求出管网特性系数K,并绘出管网特性曲线。......
2023-08-20

流体在空间的流动可以说都是三元流动,运动参数是空间三个坐标的函数。因此对于工程技术中的问题,在保证一定精度的条件下,尽可能将三元流动简化为二元流动,甚至一元流动来求近似解。流场的运动参数只是两个坐标的函数时称为二元流动。若实际流体的粘性很小,可以忽略,以管横截面上的平均流速来描述管内流动,即将二元流动化为一元流动求解。图2-3 圆管内流动a)二元流动 b)一元流动......
2023-08-20
相关推荐