“人才培养、科学研究、社会服务、文化传承创新,这是高校的核心使命”,董秀成将工作安排与四个高校核心使命紧紧相扣,“教师的工作和高校是相匹配的,我要做的是协调好这四方面的工作。”董秀成提到他的首要原则语气十分坚定:“塑造学生人格,向国家和社会输送经贸精英,本科教学是这一切的基础,也是我工作中最看重的事情。”此外,董秀成多次收到来自政府部门、企业、媒体的感谢信,表彰他为国家能源经济领域作出的智力贡献。......
2023-08-20
有着“空中机器人和协作机器人鼻祖”之称的宾夕法尼亚大学工程与应用科学学院院长韦杰·库玛(Vijay Kumar)在谈及无人机未来趋势时,曾提出“5S”理论,他认为空中机器人会朝着Small(微型)、Safe(安全)、Smart(智能)、Speed(快速)和Swarms(集群)方向发展。
关于前四个“S”应该不难理解,得益于材料、飞控、计算机视觉、动力系统等技术的进步,无人机正在逐步摆脱原本庞大的体积结构,凭借更复杂的“大脑”、用更好的稳定性和更强的执行力,走进军用和民用。
第五个“S”,译为集群,也有译为蜂群,强调的是一种团体特性,它的表现形式主要有两种:空中表演和协同作业。空中表演已经在世界各大舞台上亮相,英特尔方面先后实现了100架和500架无人机同时飞行的精彩表演,随着技术的突破,无人机集群的规模仍在不断壮大。协同作业是军事领域和行业应用正在深入研究的未来技术,最终目的是让个体之间协同配合,发挥1+1>2的集体作用。
无人机表演
2016年猴年春晚,在广州分会场上,孙楠演唱的《冲向巅峰》节目中,540台阿尔法Alpha 1S机器人集体起舞,29架多旋翼无人机身披金猴装列队飞行,这些独特元素与广州塔“小蛮腰”相映成趣,先进的技术表演成了猴年春晚一抹亮丽的科技创新风景线。无人机登上春晚舞台实属首次,这样一场科技秀,在无人机市场相对繁荣的广东,就像是区域性符号,让广东的科技魅力直观呈现在全国观众面前。
虽然是首次亮相春晚,多旋翼无人机机群表演却并不是什么新鲜事。由于这种技术手段非常吸引眼球,很多企业都喜欢在一些重要活动档口,通过集群表演来造势。2016年“618”京东购物狂欢节,京东数码携手国内无人机企业,在北京亦庄京东总部上空,让30架无人机按照预设的路线飞行,无人机根据GPS定位坐标飞至空中固定位置停留,在空中组成了“618”字样。夜幕下流动的LED灯光,收获了一轮关注热潮。2016年“12月8日唯品会八周年特卖狂欢庆典”来临之际,128架发着粉色LED光的无人机在珠江多姿的夜空下,先后排成“128”和“唯品会”字样,引得市民驻足观看。
提起无人机集群表演,就不得不提英特尔,它最早创造了100架多旋翼无人机同时飞行的世界纪录,在这一纪录接连被别家打破后,2016年11月,英特尔又实现了500架无人机同时飞行的创举,技术人员只用不到一年时间,就将无人机集群的规模较之前扩大了五倍。英特尔方面介绍,500架无人机灯光秀背后的团队只需十人,且大部分负责动作规划,最后的表演操作仅由一人完成。
载人飞机编队飞行时,通常采用的是长僚关系,飞行员驾驶长机按照预定航线稳定飞行,僚机飞行员按照约定好的相对位置飞行,保持整体队形。对于无人机集群飞行而言,没有机载驾驶员的直接操作,想要找到自己的位置和保持相互之间的位置关系,就涉及复杂的定位技术。
定位是多无人机协同的一个难点,是扩大无人机编队规模的一只拦路虎,要考虑精度、成本、飞行场地、编队规模等因素。关于无人机集群的定位,据一位不愿具名的无人机业内人士介绍,主要涉及下面几种技术手段:
地面点块。借助地面点块是室内编队飞行最常用的方式,是一种非常好的近距离解决方案,通过在地面上设置标识,可以进行定位和姿态测量,这种方式相对比较简单。Parrot无人机表演就是应用地面点块的典型案例,在英国著名电视节目“英国达人秀”上,就上演过两位舞者与8架Parrot Bebop 2无人机共舞的场景。

Parrot无人机表演秀
RTK(实时动态差分)定位技术。GPS设备民用产品的定位精度在10~20米,这样的精度会大大降低编队密度。RTK是一种高精度的测量方法,是基于载波相位观测值的实时动态定位技术,它能够实时地提供测站点在指定坐标系中的三维定位结果,精度可以达到厘米级,它的缺点是成本高。关于GPS、差分定位的具体介绍可阅读本书第5章。
视觉测距。视觉是硬件成本相对较低的解决方案,主要压力就是软件开发需要做很多工作。视觉方案核心就是视觉测距,编队问题需要动态地以一定频率刷新一个视野内的位置点云,测量无人机相对位置,去除视野内其他东西的干扰。主动光测量的结构光扫描和TOF(飞行时间)是比较有效的方案,被动光测量的双目是比较有效的方案。
运动捕捉。它相当于多目视觉定位的高级版本,精度高一些,通常采用主动红外光。在一定的范围内可以到毫米级的精度,有些实验室常常拿来做真值用。局限是只能室内和室外小范围用,缺点就是价格高。主流的两个厂商是VICON和optitrack,前者一套上百万人民币,后者便宜一些,为几十万人民币。
状态估计。每一个无人机个体需要一套滤波器估计自己的状态,包括位置、速度、加速度和姿态,但是在编队情况中比较特殊。第一,在自主的全分布编队中,由于没有主从关系,没有集中控制,个体无人机只能通过交互通信中获取的周边无人机的状态(位置、速度、加速度和姿态)与任务规划得到的群轨迹进行闭环,生成自己的控制量,在这里就需要一套最优估计的滤波器来估计周围无人机和群体质心的状态,然后通过这个状态来进行控制。第二,多个无人机之间必然存在通信延迟,而且在对等通信下或许收到的每台无人机的通信延迟还不同,在这个情况下做好状态估计也是工程上比较麻烦的事情。
所以说,编队飞行虽美,其背后的技术手段也是十分庞杂的,仅定位这一个环节就需要深入的考量,才能提高定位精度,增加编队密度。不过从现在的形式来看,英特尔从100架无人机编队到500架无人机编队只用了不到一年的时间,无人机编队飞行有相当大的发展空间。
无人机编队军事应用
无人机集群表演进展得如火如荼,而实际上,无人机集群最大的潜力在军事领域。表演注重的是好看,拼图组字或者有序地在空中舞动,就是无人机的任务。而在军事上,将领们对无人机集群的要求远不止于此。2005年,美国国防部在《无人机系统路线图2005—2030》中将无人机的自主控制能力划分为10个等级,计划在未来20多年的时间里逐层级实现。路线图从第5级“集群协调”以后均与集群有关,最高级是第10级“全自主集群”。从第5级到第10级,无人机的自主性和战术能力越来越高,最终目标是集群中的每一个个体都具备完全的自主作战能力。
从第1级到第10级,这10个等级依次是:
1.Remotely Guided(远程制导)
2.Real Time Health/Diagnosis(实时故障诊断)
3.Adapt to Failures&Flight Conditions(故障及飞行条件自适应)
4.Onboard Route Replan(机上航线再计划)
5.Group Coordination(集群协调)
6.Group Tactical Replan(集群战术再规划)
7.Group Tactical Goals(集群战术目标)
8.Distributed Control(分布式控制)
9.Group Strategic Goals(集群战略目标)
10.Fully Autonomous Swarms(全自主集群)
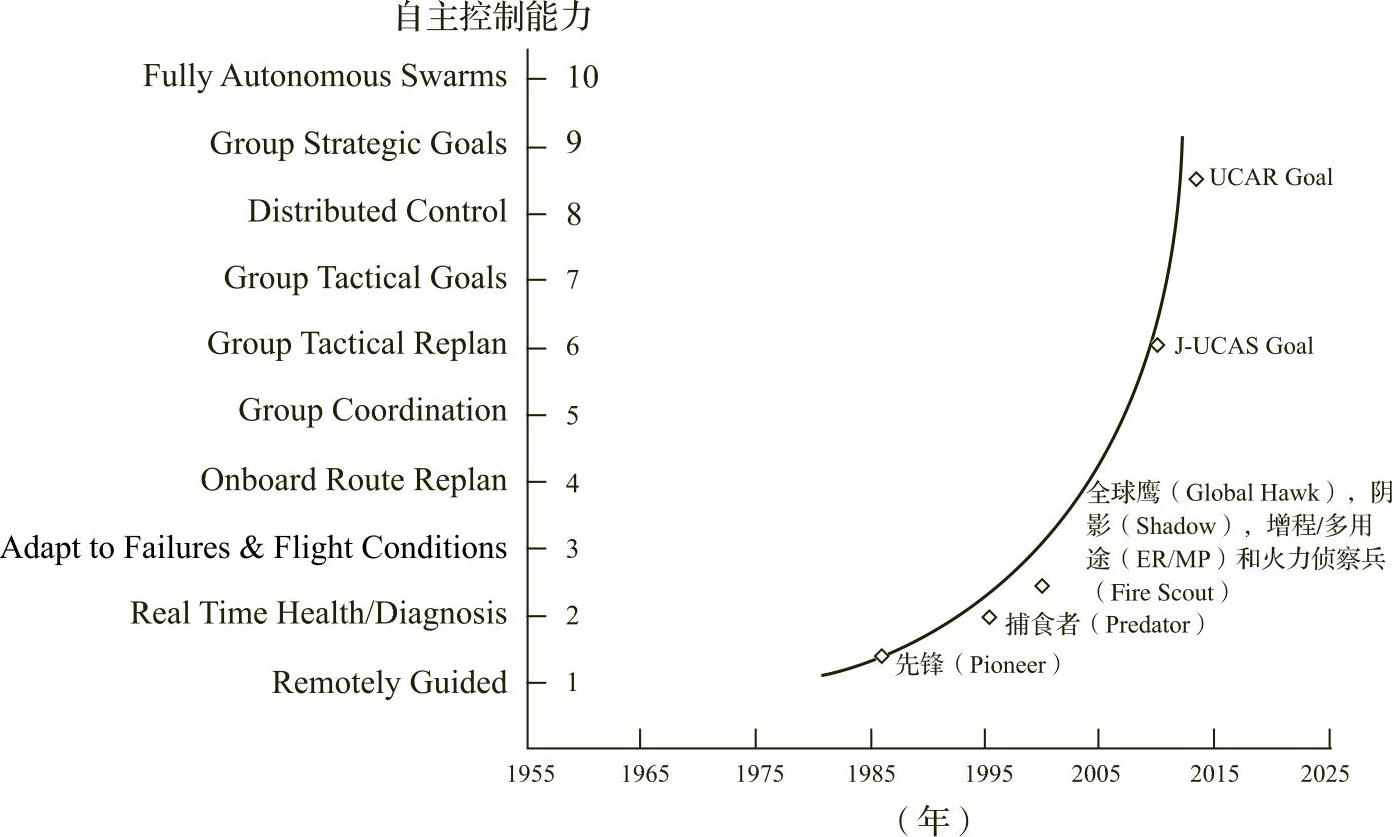
美国《无人机系统路线图2005—2030》
在人们的印象中,在战场上耀武扬威的一直都是“捕食者”“全球鹰”这样的大型无人机。它们也确实在很长一段时间都是美军无人机的中坚力量。但空中力量的升级换代,是历史的必然趋势,尤其作为军用无人机实力型选手的美国,在不断升级的军备竞赛中,更想要拔得头筹,以保证自己无人机第一梯队的地位。
无人机集群这个想法是怎么来的呢?这还要归功于蚂蚁。蚂蚁虽然是一种非常渺小的个体,但是它们的行动总是团结一致的。一群蚂蚁在搬回一小块苹果的时候,每只蚂蚁都是独立行动的,并没有一个指挥者告诉它们该什么时候直行、什么时候拐弯,但它们却能通过信息素(Pheromone)交互的自组织行为团结完成任务。而且整个任务中,蚂蚁数量的增加和减少都不会改变这个任务的完成度。
受这一生物现象的启发,美国国防部高级研究计划局(DARPA)于2000年启动了无人机集群空中战役研究计划,想让无人机之间通过释放“数字信息素”完成目标攻击任务,研究人员还为集群设计了一种自组织空中任务分配方法,展开了仿真实验。到了2005年,如上面所述,无人机集群已经成为美军无人机发展路径的关键环节。
后来的十多年里,美军大大小小开展了很多无人机集群项目。
美国海军的项目“Low-Cost Unmanned aerial vehicle Swarming Technology”,简称为“LOCUST(蝗虫)”,已经实现了40秒内在海上连续发射30架无人机,且机群编队飞行的试验。小型无人机存储在一个多管式的发射装置中,离开发射器后,机翼展开并按照预定路线进入编队状态。无人机一次性发射不用回收,由于造价便宜,单价为1万~1.5万美元,对美军来说也不算太大的损失。

LOCUST项目无人机连续发射
还有可以回收利用的项目,比如2015年美国国防部高级研究计划局(DARPA)推出的“小魔怪(Gremlins)”无人机计划。根据该计划,无人机机群从大型空中飞行平台上投放,发射平台位于敌方防御范围之外。无人机任务完成后,由一架C-130运输机带回,并为24小时之内的下一次作战做准备,理想状态下,可以反复部署20次。该项目分三个阶段,分别是为期10个月的系统设计、为期1年的技术成熟期、为期1年半的试验,初步计划是2020年完成演示验证试验。
另一个听起来很厉害的项目叫“忠诚僚机”。该项目由美国空军研究实验室(Air Force Research Laboratory,AFRL)于2015年中旬发起,目的是将第四代战机进行无人驾驶化改装,并将其与第五代隐身战机配对,使第五代战机(长机)的驾驶员可以对无人机(僚机)进行控制,从而让双方的作战能力都有所加强。据外媒报道,美国空军计划于2018年展开F-16武装无人机与F-35战斗机配对作战测试。“选择一架F-16做成无人驾驶飞机。F-16是第四代战机,把它和第五代F-35战机配对,然后两个一起操作”,美国国防部副部长鲍勃·沃克(Bob Work)说,无人机与有人驾驶飞机联合编队是未来的发展趋势,“这种趋势定会实现”。
为了能够将集群快速投入战场,美国还发明了3D打印无人机,名叫“山鹑(Perdix)”,重约1磅(0.454千克),可以从战机上发射。该项目由美国国防部战略能力办公室(Strategic Capabilities Office)发起,2015年的一次飞行测试中,F-16战斗机通过曳光弹投放器投掷出20架“山鹑”。
除了美国,中国、俄罗斯、英国等国也有相关的研究实验。比如2016年珠海航展上,除了“彩虹CH-5”“翼龙”“云影”等国产无人机外,中国固定翼无人机集群也大放异彩。中国首个固定翼无人机集群飞行试验,以67架飞机的数量,改写了此前由美国海军保持的50架固定翼无人机集群飞行的世界纪录。
无人机集群单个体型虽然普遍较小,但是能力不可小觑,个体们团结起来,可以做自杀式袭击、电子侦查,也能电子干扰压制,能力并不亚于常规的大型无人机。
无人机集群有一个明显的优势是,防御起来十分困难。数量多、体积小,在技术上防御它们就不是很容易。在成本上,用数十万甚至上百万美元的导弹,打击一万美元的无人机,代价也过高。
有关无人机:引领空中机器人新革命的文章

“人才培养、科学研究、社会服务、文化传承创新,这是高校的核心使命”,董秀成将工作安排与四个高校核心使命紧紧相扣,“教师的工作和高校是相匹配的,我要做的是协调好这四方面的工作。”董秀成提到他的首要原则语气十分坚定:“塑造学生人格,向国家和社会输送经贸精英,本科教学是这一切的基础,也是我工作中最看重的事情。”此外,董秀成多次收到来自政府部门、企业、媒体的感谢信,表彰他为国家能源经济领域作出的智力贡献。......
2023-08-20

1983年,雅马哈公司接到来自日本农林水产省提出的发明无人直升机的要求。1991年,日本农林水产省出台政策,推广植保无人机在稻田中的应用,雅马哈公司无人机在政策利好的情况下得到大力发展。2015年,雅马哈公司尝试打开欧美市场,并成为首家获得美国联邦航空管理局许可,可以在美国飞行植保无人机的公司。据2015年的统计数据,在日本雅马哈公司植保无人机使用量超过2500架,由雅马哈公司无人机进行喷洒作业的稻田约占当地全部稻田的35%~40%。......
2023-07-23

竞赛类型的服装表演主要有两种,一种是服装设计赛事,另一种是模特赛事。比赛内容各有不同,但基本都有服装现场表演。服装赛事类服装表演所展示的服装是参赛选手自己设计的,配饰均由参赛选手提供。所以,大赛组委会只需提供服装模特和表演场地,按照参赛选手设计的服装进行分类即可。要选用几种类别不同的服装,以体现模特对不同类型服装的理解力和表达力。......
2023-06-20

表2-3工程师在产品、生产、系统的生命周期内的贡献CDIO的四个阶段对工程人才的要求与卓越计划中各层次工科院校的人才培养目标基本上是吻合的。培养方案的制定必须以人才定位为前提,适当调整过去以培养设计型人才为主的思路,适当增加实用化的课程,切实为生产、服务型工程师的培养奠定基础。......
2023-06-15

动作之快捷、手法之老到,使人不得不佩服杰克的动手能力和专业造诣。刚吃完午餐,杰克又直言不讳地提出要到车间去,并表示不需要管理人员陪同。晚上,公司安排杰克在酒店住下。公司采纳了杰克的意见,并立即指挥工人予以更换。后来,在第一批正式产品装集装箱时,杰克不顾酷暑,一头钻进集装箱,非常仔细地亲手一只一只把沙发装平稳,把填充材料充实牢固。完美的产品是由完美的环节创造的。......
2023-12-05

梦想要大,鞋也要放好如果我们试着去画人生轨迹图,会发现人的一生并不是由平凡的时间组成的,而必定是由精彩时刻组成的。他那个阶段的人生梦想是做金融家,所以他自己找到的偶像是巴菲特。有一些梦想的实现要一步步走,既能看到未来的远大目标,也能看到今天对走向那个伟大目标有益的小目标。所谓“梦想要大,鞋也要放好”,让一个人从优秀到卓越可能取决于一些小习惯。......
2024-01-09

获批省级大学生校外实践教学基地9个、省级实验教学示范中心2个;与中央电视台、天津卫视等电视台密切合作,输送学生实习实践;学校获得由科技部授予的“国家级众创空间”、获辽宁省教育厅授予“大学生创业孵化示范基地”和“大学生创新创业基地”“文化部文化产业双创服务体系建设扶持单位”“全国深化创新创业教育改革特色典型经验高校”“辽宁省首批创新创业示范高校”等荣誉称号。......
2023-08-26

中国史学与社会史的关系,在大陆大体上说是中国历史学从传统历史编纂学经历近代史学,转向马克思主义史学与社会史相结合的方向;在台湾则是近代史学与新史学的相继发展。另一个是台湾史学家出版的《新史学》杂志,提倡新社会史的研究,不断开辟史学研究领域,是新社会史的园地。......
2023-07-02
相关推荐