绝对评价也有三大特点。绝对评价有两个优点。所以,形成性评价在教学评价中是非常重要的,它能够在教学过程中发现存在的问题,改善或修正教学方案,这种教学评价的重要性是不可忽视的。......
2023-07-23
实际的GPS系统会以一定格式输出很多数据,如时间,精度因子,卫星编号,信噪比等,但对于无人机控制而言,最为重要,也是最常使用的还是“经度(Longitude)”,“纬度(Latitude)”以及“高度(height)”三组数据:PG=[λ,φ,h]T。通过GPS获取的飞行器的位置坐标基于WGS-84坐标系,简称Geodetic或G坐标系。

图6.8 1972年7月由阿波罗17号宇宙飞船拍摄的地球照片(图片来源:维基百科)
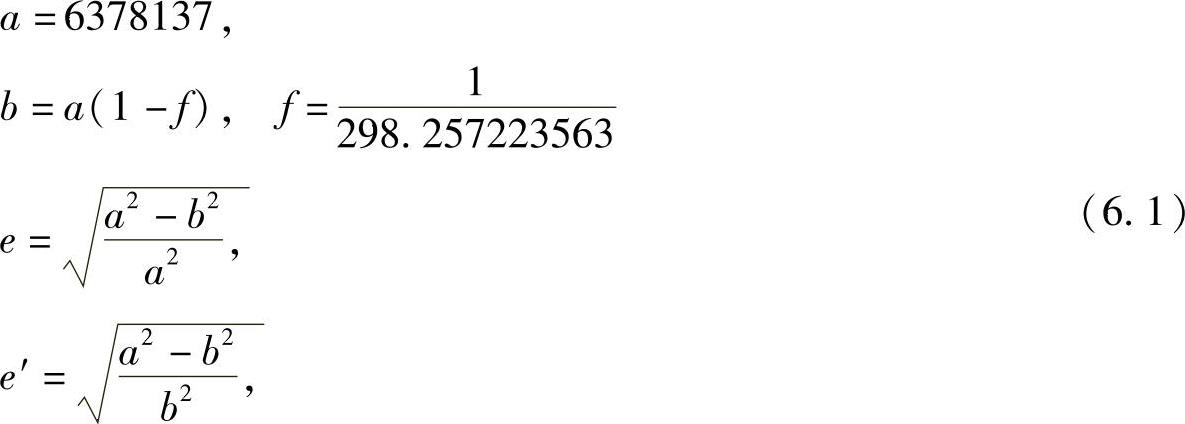
为什么需要单独建立一个坐标系呢?地球表面地势复杂,有山有海,高低不平,需要建立一个简单而精确的近似数学模型。研究人员和工程师们决定采用椭球体作为地球的近似,而G坐标系就描述了一个椭球体,给出该椭球体的基本参数:长半轴a,短半轴b,第一偏心率e,第二偏心率e′,扁率f,曲率半径(米):
如上节所述,GPS硬件直接获取的高度是相对于G坐标系中椭球表面的高度。而海拔是相对于海平面的高度,它与地球表面形状和重力分布相关。相对于大地水准面的高度才是海拔,也就是图中的H参数。详细描述可以通过下式获得:
h≈H+N, (6.2)
N(大地水准偏差)作为GPS输出高度h和当地海拔之间的偏差,一般在正负100m以内。
由于GPS导航方式采用的坐标系不能直接获取无人机相对于地面的位置高度,而且这个误差范围是如此之大,所以无人机系统都需要根据实际的任务需求安装额外硬件以确保无人机高度状态信息的精确反馈。
有关城堡里学无人机:原理、系统与实现的文章

绝对评价也有三大特点。绝对评价有两个优点。所以,形成性评价在教学评价中是非常重要的,它能够在教学过程中发现存在的问题,改善或修正教学方案,这种教学评价的重要性是不可忽视的。......
2023-07-23

1)首层平面图的楼梯梯级只有“上”,折断线的另一侧是楼梯底的空间。如图10-16所示为1—1楼梯剖面图。图10-17楼梯详图10.8.3.3节点详图上述楼......
2023-06-22

图11-77 “几何公差”对话框2)定义要插入的几何公差类型。指定几何公差的参照基准和材料状态,以及复合公差的值和参照基准。指定几何公差符号和修改者以及突出公差带。指定创建或编辑几何公差时要与其相关联的附加文本。4)完成定义几何公差,便可以返回“模型参考”选项卡,单击“放置几何公差”按钮,将几何公差插入绘图中,然后单击“确定”按钮,接受几何公差设置并退出“几何公差”对话框。......
2023-11-08

触发电路的输出环节一般由脉冲变压器及其它一些元件组成,如图1-57所示。设计脉冲变压器TM时,不仅考虑输出脉冲的幅度和宽度,同时要考虑变压器的内阻。对于宽脉冲的脉冲变压器,铁芯截面应取得大些,绕组线径取粗些,初、次级匝数可按公式计算。根据不同的电路和要求,在脉冲变压器初、次级可加接图1-57中的全部或部分元件。图1-57触发电路的输出环节电阻R2的作用是调节和限制输出触发电流,其数值约50~1kΩ之间。......
2023-06-20
输出整流滤波电路的作用就是将中频交流电变为直流电。图6-11 输出整流滤波电路a)全波整流 b)单端式逆变整流在整流过程中,整流二极管都会在某一时刻承受反向电压。......
2023-06-30

两块一副,落地有阴卦、阳卦、顺卦三种阴阳组合。在鹤峰“傩愿戏”的傩祭仪式中,常用的卦象主要有:青龙卦、白虎卦、朱雀卦、玄武卦、腾蛇卦,多为据卦形判定吉凶。(见下图)三元将军诀:伸三个指头。......
2023-08-04

图2-30 新添加网络名的网络表3.添加其他说明添加文字说明在原理图中,以用“Place”→“Text String”命令添加文字说明,如图2-31所示。“Note”符号的左上角有个小三角形,单击此小三角形,可以把“Note”收起,成为一个更小的符号,利于节约原理图空间,再单击则可以展开。......
2023-06-23

C语言中没有输入输出语句,C程序中的输入和输出主要是通过C编译系统提供的输入输出函数来实现。程序中使用最多的是格式输出函数printf、格式化输入函数scanf、字符输入函数getchar以及字符输出函数putchar,它们是I/O类标准库函数。在C程序中输出数据时,必须按照被输出数据项的数据类型来控制格式的选择。例如,%6.2f说明输出域宽为6位,整数部分占3位,小数部分占2位。格式控制字符串用于规定为程序提供数据的样式。......
2023-11-20
相关推荐